%EB%91%90%EB%8D%94%EC%A7%80
-
 지하 공간 탐사를 위한 생체모방형 두더지 로봇 개발
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 일명 두더지 로봇인 `몰봇(Mole-bot)'을 개발했다. 이는 두더지의 생물학적 구조와 굴착 습성을 모방해 무인 지하 탐사나 극한지역 또는 우주행성 탐사에 효율적으로 활용가능한 생체모방형 로봇이다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체해 신 에너지원으로 사용 가능한 탄층 메탄가스(Coalbed Methane)나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 우주 행성의 표본 채취를 목표로 연구팀에 의해 개발됐다.
기존 천부 굴착작업은 시추기와 파이프라인, 펌프 등 각종 장비를 조합해 작업을 진행해야 하지만 이제 `몰봇' 로봇 하나면 모든 작업을 원활히 수행할 수 있다. 이를 임베디드 방식이라고 표현하는데, 특히 `몰봇' 개발을 계기로 기존의 거대하고 복잡한 드릴링 장비 사용과 이로 인한 복잡한 공정, 환경 오염 유발 등 많은 문제점이 해결될 것으로 기대된다.
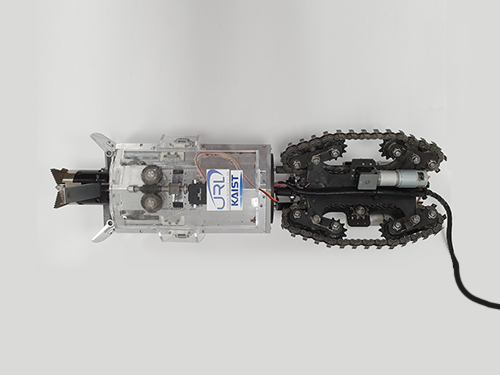
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다. 우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 `치젤 투스(Chisel tooth mole)'를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨구조를 모사해 설계했다. 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다. 연구팀은 이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360°자유롭게 방향 전환이 가능하다. 몰봇은 굴착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
마지막으로 이동부는 동일한 3개의 유닛을 삼각형 형태(120°간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
연구팀은 이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 지하 환경은 주변이 암석과 흙으로 이뤄져있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어둡기 때문에 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했는데 이 결과, 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다. 즉, 연구팀은 지구 자기장 시계열 데이터를 매칭시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 자체적으로 개발해 로봇 위치를 측정하는 문제를 해결했으며, 이는 지하공간에서의 3차원적인 자율 주행을 가능케한다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며, 총 4개의 항목에서 평가를 받았다. 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도로, 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
명 교수 연구팀은 몰봇이 기존 로봇들에 반해 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나고, 최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것으로 기대하고 있다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다. 그동안의 연구성과물로는 해외 우수저널 논문 5건 게재, 국제 학술대회 발표 12건, 국내 학술대회 발표 4건, 특허 출원 및 등록은 각각 3건과 1건의 실적을 기록했고 특히 국제 학술대회 우수발표상 및 국내학술대회 우수논문상을 각 1건씩 수상했다.
개발된 두더지 로봇인 `몰봇'의 구동 및 굴진 영상은 아래 주소에서 확인할 수 있다.
URL: https://youtu.be/pEnKy5UYEYQ
한편, 이번 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐다.
2020.06.05 조회수 17352
지하 공간 탐사를 위한 생체모방형 두더지 로봇 개발
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 일명 두더지 로봇인 `몰봇(Mole-bot)'을 개발했다. 이는 두더지의 생물학적 구조와 굴착 습성을 모방해 무인 지하 탐사나 극한지역 또는 우주행성 탐사에 효율적으로 활용가능한 생체모방형 로봇이다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체해 신 에너지원으로 사용 가능한 탄층 메탄가스(Coalbed Methane)나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 우주 행성의 표본 채취를 목표로 연구팀에 의해 개발됐다.
기존 천부 굴착작업은 시추기와 파이프라인, 펌프 등 각종 장비를 조합해 작업을 진행해야 하지만 이제 `몰봇' 로봇 하나면 모든 작업을 원활히 수행할 수 있다. 이를 임베디드 방식이라고 표현하는데, 특히 `몰봇' 개발을 계기로 기존의 거대하고 복잡한 드릴링 장비 사용과 이로 인한 복잡한 공정, 환경 오염 유발 등 많은 문제점이 해결될 것으로 기대된다.
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다. 우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 `치젤 투스(Chisel tooth mole)'를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨구조를 모사해 설계했다. 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다. 연구팀은 이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360°자유롭게 방향 전환이 가능하다. 몰봇은 굴착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
마지막으로 이동부는 동일한 3개의 유닛을 삼각형 형태(120°간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
연구팀은 이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 지하 환경은 주변이 암석과 흙으로 이뤄져있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어둡기 때문에 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했는데 이 결과, 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다. 즉, 연구팀은 지구 자기장 시계열 데이터를 매칭시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 자체적으로 개발해 로봇 위치를 측정하는 문제를 해결했으며, 이는 지하공간에서의 3차원적인 자율 주행을 가능케한다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며, 총 4개의 항목에서 평가를 받았다. 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도로, 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
명 교수 연구팀은 몰봇이 기존 로봇들에 반해 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나고, 최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것으로 기대하고 있다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다. 그동안의 연구성과물로는 해외 우수저널 논문 5건 게재, 국제 학술대회 발표 12건, 국내 학술대회 발표 4건, 특허 출원 및 등록은 각각 3건과 1건의 실적을 기록했고 특히 국제 학술대회 우수발표상 및 국내학술대회 우수논문상을 각 1건씩 수상했다.
개발된 두더지 로봇인 `몰봇'의 구동 및 굴진 영상은 아래 주소에서 확인할 수 있다.
URL: https://youtu.be/pEnKy5UYEYQ
한편, 이번 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐다.
2020.06.05 조회수 17352 -
 신 개념 두더지 게임로봇 개발
- 이우훈 교수 연구팀, 프랑스에서 열린 세계적 가상현실 및 증강현실 전시회인 ‘라발 버추얼’에서 최고작품상 수상 -
KAIST 연구팀이 만든 신 개념 게임로봇이 세계적인 가상현실 전시회에 국내 작품으론 첫 출품됐음에도 불구하고 대상격인 최고작품상까지 차지, 수상자 명단에 이름을 올려 화제가 되고 있다.
우리 학교 산업디자인학과 이우훈 교수팀이 지난 3월 28일부터 4월 1일까지 프랑스 라발에서 열린 세계적 가상현실 및 증강현실 전시회인 라발 버추얼(Laval Virtual)에서 일명 두더지 게임로봇인 ‘몰봇(MoleBot)’을 출품해 최고작품상을 수상했다.
몰봇은 기존의 컴퓨터 게임과 같은 가상현실 방식과는 다르게 순전히 물리적인 환경에서도 즐길 수 있는 신 개념 게임로봇으로, 인간과 가상세계가 상호작용할 수 있다는 점에서 전시회기간 내내 관람객들로부터 많은 주목을 받았다.
‘몰봇’ 테이블은 약 15,000개의 작은 정육각형 핀들로 구성돼 있는데, 테이블 속에 있는 물체가 움직이면 육각 핀이 미끄러지듯 오르내려 마치 내부에 두더지가 돌아다니는 것처럼 보인다.
특히, 조이스틱을 이용해 조종할 수 있고 테이블 위 물체와 물리적 상호작용을 통해 축구나 미로게임 등 다양한 게임을 즐길 수 있는 게 이 작품의 특징이다.이와 함께, ‘몰봇’은 제스처로도 조종이 가능한데 연구팀은 사람의 손동작을 인식할 수 있도록 ‘몰봇’ 위에 키넥트(Kinect)를 설치했기 때문에 마치 애완동물을 가지고 노는 듯한 게임도 가능하다.
이 교수팀은 ‘테이블 속에 두더지가 산다면...’이라는 다소 황당한 발상을 통해 이 게임로봇을 구상했다.
연구팀은 우선 15,000여개의 육각 핀을 배열해 변형될 수 있는 테이블을 만든 다음, 유선형의 플라스틱 몰드를 핀 아래에 배치하고 그 사이에는 스판덱스(Spandex)라는 고탄력 섬유를 적용해 마찰을 줄임으로써 내부에 두더지가 살아 움직이는 것과 같은 유연한 움직임을 구현하는데 성공했다.
몰드 안에는 자석을 삽입해 내부의 기계적인 움직임을 몰드에 잘 전달될 수 있도록 설계했다. 이후 많은 노력을 거쳐 연구를 시작한지 약 2년 만에 ‘몰봇’을 세상에 선보일 수 있었다.
이우훈 교수는 “가상현실 및 증강현실이라는 공학 분야의 전시회에서 디자인팀이 최고상을 수상하는 것은 극히 이례적인 일”이라며 “작품의 기술적 창의성과 예술적 완성도가 조화를 이뤄 좋은 결과를 낸 것 같다”고 수상소감을 밝혔다.
이 교수는 또 “이번 작품은 테이블 위에 상호작용 가능한 세계를 구축하는 새로운 게임 인터페이스가 될 수 있다”며 “그 동안 디자인의 관점에서 공학과 예술을 접목하려고 노력해왔는데 앞으로 몰봇을 게임은 물론 인간-컴퓨터 상호작용, 건축, 인테리어, 의료 등 다양한 분야에 응용할 계획”이라고 덧붙였다.
올해로 14회 째를 맞은 라발 버추얼은 매년 1만명 이상 참가하는 세계적인 권위를 지닌 전시회로 가상현실과 증강현실분야에서 최첨단 신기술을 선보이는 학회로서도 유명하다.
모두 12개 분야에서 각각 한 작품씩 선정해 상을 주는데 이 교수팀 작품은 분야를 통틀어 이 대회 최고작품상을 수상했다.
관련영상 http://vimeo.com/24155036
그림1. 몰봇
그림2. 몰봇의 내부구조
그림3. 올해 프랑스에서 열린 라발 버추얼에서 어린이들이 몰봇을 가지고 게임하는 모습
2012.04.17 조회수 16280
신 개념 두더지 게임로봇 개발
- 이우훈 교수 연구팀, 프랑스에서 열린 세계적 가상현실 및 증강현실 전시회인 ‘라발 버추얼’에서 최고작품상 수상 -
KAIST 연구팀이 만든 신 개념 게임로봇이 세계적인 가상현실 전시회에 국내 작품으론 첫 출품됐음에도 불구하고 대상격인 최고작품상까지 차지, 수상자 명단에 이름을 올려 화제가 되고 있다.
우리 학교 산업디자인학과 이우훈 교수팀이 지난 3월 28일부터 4월 1일까지 프랑스 라발에서 열린 세계적 가상현실 및 증강현실 전시회인 라발 버추얼(Laval Virtual)에서 일명 두더지 게임로봇인 ‘몰봇(MoleBot)’을 출품해 최고작품상을 수상했다.
몰봇은 기존의 컴퓨터 게임과 같은 가상현실 방식과는 다르게 순전히 물리적인 환경에서도 즐길 수 있는 신 개념 게임로봇으로, 인간과 가상세계가 상호작용할 수 있다는 점에서 전시회기간 내내 관람객들로부터 많은 주목을 받았다.
‘몰봇’ 테이블은 약 15,000개의 작은 정육각형 핀들로 구성돼 있는데, 테이블 속에 있는 물체가 움직이면 육각 핀이 미끄러지듯 오르내려 마치 내부에 두더지가 돌아다니는 것처럼 보인다.
특히, 조이스틱을 이용해 조종할 수 있고 테이블 위 물체와 물리적 상호작용을 통해 축구나 미로게임 등 다양한 게임을 즐길 수 있는 게 이 작품의 특징이다.이와 함께, ‘몰봇’은 제스처로도 조종이 가능한데 연구팀은 사람의 손동작을 인식할 수 있도록 ‘몰봇’ 위에 키넥트(Kinect)를 설치했기 때문에 마치 애완동물을 가지고 노는 듯한 게임도 가능하다.
이 교수팀은 ‘테이블 속에 두더지가 산다면...’이라는 다소 황당한 발상을 통해 이 게임로봇을 구상했다.
연구팀은 우선 15,000여개의 육각 핀을 배열해 변형될 수 있는 테이블을 만든 다음, 유선형의 플라스틱 몰드를 핀 아래에 배치하고 그 사이에는 스판덱스(Spandex)라는 고탄력 섬유를 적용해 마찰을 줄임으로써 내부에 두더지가 살아 움직이는 것과 같은 유연한 움직임을 구현하는데 성공했다.
몰드 안에는 자석을 삽입해 내부의 기계적인 움직임을 몰드에 잘 전달될 수 있도록 설계했다. 이후 많은 노력을 거쳐 연구를 시작한지 약 2년 만에 ‘몰봇’을 세상에 선보일 수 있었다.
이우훈 교수는 “가상현실 및 증강현실이라는 공학 분야의 전시회에서 디자인팀이 최고상을 수상하는 것은 극히 이례적인 일”이라며 “작품의 기술적 창의성과 예술적 완성도가 조화를 이뤄 좋은 결과를 낸 것 같다”고 수상소감을 밝혔다.
이 교수는 또 “이번 작품은 테이블 위에 상호작용 가능한 세계를 구축하는 새로운 게임 인터페이스가 될 수 있다”며 “그 동안 디자인의 관점에서 공학과 예술을 접목하려고 노력해왔는데 앞으로 몰봇을 게임은 물론 인간-컴퓨터 상호작용, 건축, 인테리어, 의료 등 다양한 분야에 응용할 계획”이라고 덧붙였다.
올해로 14회 째를 맞은 라발 버추얼은 매년 1만명 이상 참가하는 세계적인 권위를 지닌 전시회로 가상현실과 증강현실분야에서 최첨단 신기술을 선보이는 학회로서도 유명하다.
모두 12개 분야에서 각각 한 작품씩 선정해 상을 주는데 이 교수팀 작품은 분야를 통틀어 이 대회 최고작품상을 수상했다.
관련영상 http://vimeo.com/24155036
그림1. 몰봇
그림2. 몰봇의 내부구조
그림3. 올해 프랑스에서 열린 라발 버추얼에서 어린이들이 몰봇을 가지고 게임하는 모습
2012.04.17 조회수 16280