-
 화재·재난 속 공간 입체적 느끼는 촉각기술 개발
재난 및 화재의 상황은 사람이 직접 투입되기 어렵고 시야가 제한될 수 있는 극한 상황이며, 드론이 수집한 공간 데이터를 촉감형 인터페이스를 통해 입체적인 정보 그대로 전달하는 것은 매우 어렵다. KAIST 연구진이 원격 제어하는 드론이 수집한 공간 데이터를 촉각 피드백을 통해 직관적으로 조종자가 이해할 수 있도록 하는 웨어러블 햅틱 기술을 개발했다.
우리 대학 기계공학과 오일권 교수 연구팀이 형상기억합금 와이어를 직교 중첩 구조의 메타구조 패턴으로 매듭지은 독립적인 직교 방향 거동이 가능한 ‘직교 방향 제어 웨어러블 햅틱(이하 WHOA)’기술을 개발했다.
햅틱(Haptic)은 시·청각을 넘어 촉각을 이용해 정보를 전달하는 기술로, 스마트폰의 진동 알림처럼 피부로 감지할 수 있는 물리적 피드백을 제공한다.
이 기술의 핵심 소재인 형상기억합금은 특정 온도로 가열하면 변형된 상태에서 원래 형태로 돌아오는 특수 금속으로 촉각을 구현하는 작동기로 사용되었다. 연구팀은 가볍고 단순한 직교 메타구조로 3차원 공간정보를 촉각으로 재구성할 수 있는 기술을 개발해서 공간 인식 기반 햅틱 내비게이션의 새로운 영역을 개척했다.
연구팀이 개발한 이 기술은 시각 정보에 의존하지 않고도 주변 환경을 ‘느낄 수’ 있는 방식으로 재난, 화재, 극한환경에서 효과적인 모빌리티 제어를 가능하게 한다. 특히, 시각 정보가 제한되는 상황에서도 공간정보를 직접 감지할 수 있어, 기존 방식보다 안정적이고 효율적인 조작이 가능하다.
촉각 피드백은 좌, 우, 상, 하, 전진, 후진 같은 공간 이동뿐만 아니라 전방 장애물 감지 시 독특한 햅틱 패턴까지 전달하도록 설계됐다. 이 기술은 재난 구조와 긴급 구호 작업 같은 중요한 상황에서 작업 효율성과 안전성을 크게 끌어올릴 가능성을 보여준다.
이 기술은 서로 수직인 독립된 촉감 모드를 생성하며, 이를 통해 팔이나 발에 착용했을 때 사용자에게 입체 공간정보를 촉감으로 전달할 수 있다. 이는 내비게이션과 원격 조작을 보다 직관적으로 수행할 수 있도록 보조한다.
WHOA를 착용하면 가로, 세로 방향의 독립적인 촉각 모드 조합을 통해 사용자는 입체적인 공간정보 피드백을 받는다. 특히 이 기술은 신발 내부의 작은 공간에서도 동작하도록 설계되어 장시간 착용할 시 피로를 최소화하는 동시에 손이 자유로운 상태에서 직관적으로 다음 이동 방향을 파악할 수 있어 실용성이 뛰어나다.
연구팀은 WHOA를 적용한 드론 내비게이션 시스템을 가상현실(VR) 환경에서 실증했다. 화재 현장의 건물을 배경으로 한 시뮬레이션에서 WHOA를 착용한 사용자는 드론을 조종하며 위험 구역을 회피하고 구조 작업을 수행했다.
드론이 수집한 공간 데이터는 촉각 피드백으로 사용자에게 전달되며, 연기와 잔해로 시야가 제한된 환경에서도 직관적으로 상황을 파악하고 드론을 제어할 수 있도록 보조한다.
오일권 교수는 “이번 기술은 시각장애인이 촉감을 활용해 길을 안내받을 수 있는 새로운 형태의 내비게이션 기법”이며 "착용형 햅틱 인터페이스는 입체적 공간정보를 촉감으로 전달하여 재난, 화재 환경 또는 국방의 MUM-T(유무인 협력 전투체계)에서 드론이나 로봇의 원격제어에 활용될 수 있다"라고 말했다.
오세웅 박사와 마난 칸(KHAN) 석사가 공동 제1 저자로 참여한 본 연구 성과는 첨단 소재 분야 국제학술지 ‘어드밴스드 머티리얼스(Advanced Materials)’에 지난 1월 8일 게재됐다.
(논문명: Wearable Haptics for Orthotropic Actuation Based on Perpendicularly Nested Auxetic SMA Knotting)
https://doi.org/10.1002/adma.202411353
한편, 이번 연구는 과학기술정보통신부와 한국연구재단이 추진하는 중견연구지원 사업으로 수행됐다.
화재·재난 속 공간 입체적 느끼는 촉각기술 개발
재난 및 화재의 상황은 사람이 직접 투입되기 어렵고 시야가 제한될 수 있는 극한 상황이며, 드론이 수집한 공간 데이터를 촉감형 인터페이스를 통해 입체적인 정보 그대로 전달하는 것은 매우 어렵다. KAIST 연구진이 원격 제어하는 드론이 수집한 공간 데이터를 촉각 피드백을 통해 직관적으로 조종자가 이해할 수 있도록 하는 웨어러블 햅틱 기술을 개발했다.
우리 대학 기계공학과 오일권 교수 연구팀이 형상기억합금 와이어를 직교 중첩 구조의 메타구조 패턴으로 매듭지은 독립적인 직교 방향 거동이 가능한 ‘직교 방향 제어 웨어러블 햅틱(이하 WHOA)’기술을 개발했다.
햅틱(Haptic)은 시·청각을 넘어 촉각을 이용해 정보를 전달하는 기술로, 스마트폰의 진동 알림처럼 피부로 감지할 수 있는 물리적 피드백을 제공한다.
이 기술의 핵심 소재인 형상기억합금은 특정 온도로 가열하면 변형된 상태에서 원래 형태로 돌아오는 특수 금속으로 촉각을 구현하는 작동기로 사용되었다. 연구팀은 가볍고 단순한 직교 메타구조로 3차원 공간정보를 촉각으로 재구성할 수 있는 기술을 개발해서 공간 인식 기반 햅틱 내비게이션의 새로운 영역을 개척했다.
연구팀이 개발한 이 기술은 시각 정보에 의존하지 않고도 주변 환경을 ‘느낄 수’ 있는 방식으로 재난, 화재, 극한환경에서 효과적인 모빌리티 제어를 가능하게 한다. 특히, 시각 정보가 제한되는 상황에서도 공간정보를 직접 감지할 수 있어, 기존 방식보다 안정적이고 효율적인 조작이 가능하다.
촉각 피드백은 좌, 우, 상, 하, 전진, 후진 같은 공간 이동뿐만 아니라 전방 장애물 감지 시 독특한 햅틱 패턴까지 전달하도록 설계됐다. 이 기술은 재난 구조와 긴급 구호 작업 같은 중요한 상황에서 작업 효율성과 안전성을 크게 끌어올릴 가능성을 보여준다.
이 기술은 서로 수직인 독립된 촉감 모드를 생성하며, 이를 통해 팔이나 발에 착용했을 때 사용자에게 입체 공간정보를 촉감으로 전달할 수 있다. 이는 내비게이션과 원격 조작을 보다 직관적으로 수행할 수 있도록 보조한다.
WHOA를 착용하면 가로, 세로 방향의 독립적인 촉각 모드 조합을 통해 사용자는 입체적인 공간정보 피드백을 받는다. 특히 이 기술은 신발 내부의 작은 공간에서도 동작하도록 설계되어 장시간 착용할 시 피로를 최소화하는 동시에 손이 자유로운 상태에서 직관적으로 다음 이동 방향을 파악할 수 있어 실용성이 뛰어나다.
연구팀은 WHOA를 적용한 드론 내비게이션 시스템을 가상현실(VR) 환경에서 실증했다. 화재 현장의 건물을 배경으로 한 시뮬레이션에서 WHOA를 착용한 사용자는 드론을 조종하며 위험 구역을 회피하고 구조 작업을 수행했다.
드론이 수집한 공간 데이터는 촉각 피드백으로 사용자에게 전달되며, 연기와 잔해로 시야가 제한된 환경에서도 직관적으로 상황을 파악하고 드론을 제어할 수 있도록 보조한다.
오일권 교수는 “이번 기술은 시각장애인이 촉감을 활용해 길을 안내받을 수 있는 새로운 형태의 내비게이션 기법”이며 "착용형 햅틱 인터페이스는 입체적 공간정보를 촉감으로 전달하여 재난, 화재 환경 또는 국방의 MUM-T(유무인 협력 전투체계)에서 드론이나 로봇의 원격제어에 활용될 수 있다"라고 말했다.
오세웅 박사와 마난 칸(KHAN) 석사가 공동 제1 저자로 참여한 본 연구 성과는 첨단 소재 분야 국제학술지 ‘어드밴스드 머티리얼스(Advanced Materials)’에 지난 1월 8일 게재됐다.
(논문명: Wearable Haptics for Orthotropic Actuation Based on Perpendicularly Nested Auxetic SMA Knotting)
https://doi.org/10.1002/adma.202411353
한편, 이번 연구는 과학기술정보통신부와 한국연구재단이 추진하는 중견연구지원 사업으로 수행됐다.
2025.01.21
조회수 4053
-
 경기욱 교수 연구팀, 3차원으로 변하는 모핑 구동기 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발했다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 최근 연구팀은 전기 활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
연구팀의 모핑 구동기는 전기유압식 구동(electrohydraulic actuation) 원리를 이용한다. 전극과 PVC 젤 복합체 사이에 전기장을 가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑(electrostatic zipping)이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 유체의 흐름을 제어할 수 있으며, 이를 통해 다양한 형상을 표현할 수 있다.
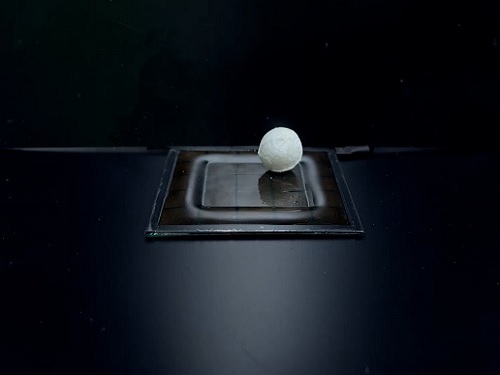
연구팀이 개발한 모핑 구동기는 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 표면에서 고속으로 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이번 연구 결과는 국제학술지 ‘사이언스 어드밴시스(Science Advances)’Vol.10(39)에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator)
또한 본 연구는 지난 8월 한국햅틱스학술대회에서 최우수논문상을 수상했다. 한편 본 연구는 국가과학기술연구회(CRC23021-000), 삼성미래기술육성재단(SRFC-IT2102-04), 한국전자통신연구원(24YB1700)의 지원으로 수행됐다.
경기욱 교수 연구팀, 3차원으로 변하는 모핑 구동기 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발했다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 최근 연구팀은 전기 활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
연구팀의 모핑 구동기는 전기유압식 구동(electrohydraulic actuation) 원리를 이용한다. 전극과 PVC 젤 복합체 사이에 전기장을 가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑(electrostatic zipping)이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 유체의 흐름을 제어할 수 있으며, 이를 통해 다양한 형상을 표현할 수 있다.
연구팀이 개발한 모핑 구동기는 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 표면에서 고속으로 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이번 연구 결과는 국제학술지 ‘사이언스 어드밴시스(Science Advances)’Vol.10(39)에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator)
또한 본 연구는 지난 8월 한국햅틱스학술대회에서 최우수논문상을 수상했다. 한편 본 연구는 국가과학기술연구회(CRC23021-000), 삼성미래기술육성재단(SRFC-IT2102-04), 한국전자통신연구원(24YB1700)의 지원으로 수행됐다.
2024.09.30
조회수 5432
-
 스파이더맨 슈트처럼 내 몸에 착 맞춰지는 옷감형 웨어러블 햅틱 개발
우리 대학 기계공학과 오일권 교수 연구팀이 형상기억합금 와이어를 오그제틱(auxetic) 메타구조로 매듭지어 형상 적응이 가능한 옷감 형태의 착용형 '햅틱(haptic) 인터페이스'를 개발했다고 28일 밝혔다.
착용형 햅틱 인터페이스 기술은 시·청각 기반의 플랫폼의 한계를 벗어나, 피부 표면으로 전해지는 직관적인 촉감으로 메타버스 속 상호작용 몰입도를 높이는 역할을 한다.
하지만 일반적인 햅틱 인터페이스는 피부에 부착하거나 별도의 고정 장치를 착용하는 착용(부착)형으로, 이러한 햅틱 인터페이스는 장시간 사용 시 피부 발진의 위험과 고정 방식은 일상 움직임에서 불편함을 초래할 수 있다. 또 수십 개의 촉각 전달 소자를 장착해 촉감을 모방하는 기존의 제작 방식 역시 장치의 무게·부피 증가로 이어지는 한계를 보이고 있다.
우선 연구팀은 가볍고 편하게 착용할 수 있는 햅틱 인터페이스 개발을 위해 형상기억합금 와이어를 핵심 소재로 선택했다. 형상기억합금 와이어란 상온에서 모양이 쉽게 변형되고, 특정 온도에 도달하면 미리 기억된 형태로 되돌아가는 특징을 갖는 형상기억합금을 철사처럼 가늘고 길게 제작한 것이다. 이러한 형상기억합금 와이어를 기존의 천 제작 방식을 활용해 매듭지어 옷감처럼 제작하는 방식을 활용하였다. 특히, 연구팀은 형상기억합금 와이어를 오그제틱(auxetic) 구조로 매듭지어, 일반 구조에서는 볼 수 없는 3D 방향으로 구조 전체가 동시에 수축 및 이완하는 특성을 구현해 내었고, 이를 통해 착용자의 신체 형상에 순응하며 사이즈가 자동으로 조절되는 옷감형 액추에이터를 개발했다.
또한 연구팀은 8개의 영역을 개별 수축 제어할 수 있도록 설계해 총 아홉 가지 방향과 타이밍에 대한 정보를 사용자에게 촉감 피드백으로 전달할 수 있게 제작했다.
예로 팔목에 착용 시, 사용자는 방향 및 타이밍에 관한 정보를 촉각적으로 인지할 수 있고, 반면 팔꿈치에 착용할 때는 옷감형 액추에이터의 가변강성 기능을 활용해 팔꿈치의 굽힘각도에 따른 피드백을 제공하는 멀티모달(두 가지 이상의 피드백 형태로 정보를 전달) 햅틱 인터페이스로서 개발했다.
이처럼 옷감형 액추에이터를 팔목에 착용한 사용자가 가상현실 속 모빌리티 로봇 주변의 위치정보를 파악하고, 시각과 청각 정보가 제한될 때 장애물을 피해 로봇을 안정적으로 주행하는 실증에도 성공했다.
오일권 교수는 이번 연구성과를 통한 실용화 시 활용에 대해 "착용형 햅틱 인터페이스는 촉각 정보를 활용한 로봇, 무인기 제어와 메타버스가 접목된 의료·교육 등에도 활용할 수 있다"고 말했다.
한편, 이번 연구는 과학기술정보통신부(장관 이종호)와 한국연구재단이 추진하는 리더연구자(창의연구) 지원 사업으로 수행됐다. 연구 성과는 첨단 소재 분야 국제학술지 <어드밴스드 머티리얼스(Advanced Materials)>에 9월 19일 게재됐고, 연구의 우수성을 인정받아 학술지 표지 논문으로 선정됐다. (논문명: Easy-To-Wear Auxetic SMA Knot-Architecture for Spatiotemporal and Multimodal Haptic Feedbacks)
스파이더맨 슈트처럼 내 몸에 착 맞춰지는 옷감형 웨어러블 햅틱 개발
우리 대학 기계공학과 오일권 교수 연구팀이 형상기억합금 와이어를 오그제틱(auxetic) 메타구조로 매듭지어 형상 적응이 가능한 옷감 형태의 착용형 '햅틱(haptic) 인터페이스'를 개발했다고 28일 밝혔다.
착용형 햅틱 인터페이스 기술은 시·청각 기반의 플랫폼의 한계를 벗어나, 피부 표면으로 전해지는 직관적인 촉감으로 메타버스 속 상호작용 몰입도를 높이는 역할을 한다.
하지만 일반적인 햅틱 인터페이스는 피부에 부착하거나 별도의 고정 장치를 착용하는 착용(부착)형으로, 이러한 햅틱 인터페이스는 장시간 사용 시 피부 발진의 위험과 고정 방식은 일상 움직임에서 불편함을 초래할 수 있다. 또 수십 개의 촉각 전달 소자를 장착해 촉감을 모방하는 기존의 제작 방식 역시 장치의 무게·부피 증가로 이어지는 한계를 보이고 있다.
우선 연구팀은 가볍고 편하게 착용할 수 있는 햅틱 인터페이스 개발을 위해 형상기억합금 와이어를 핵심 소재로 선택했다. 형상기억합금 와이어란 상온에서 모양이 쉽게 변형되고, 특정 온도에 도달하면 미리 기억된 형태로 되돌아가는 특징을 갖는 형상기억합금을 철사처럼 가늘고 길게 제작한 것이다. 이러한 형상기억합금 와이어를 기존의 천 제작 방식을 활용해 매듭지어 옷감처럼 제작하는 방식을 활용하였다. 특히, 연구팀은 형상기억합금 와이어를 오그제틱(auxetic) 구조로 매듭지어, 일반 구조에서는 볼 수 없는 3D 방향으로 구조 전체가 동시에 수축 및 이완하는 특성을 구현해 내었고, 이를 통해 착용자의 신체 형상에 순응하며 사이즈가 자동으로 조절되는 옷감형 액추에이터를 개발했다.
또한 연구팀은 8개의 영역을 개별 수축 제어할 수 있도록 설계해 총 아홉 가지 방향과 타이밍에 대한 정보를 사용자에게 촉감 피드백으로 전달할 수 있게 제작했다.
예로 팔목에 착용 시, 사용자는 방향 및 타이밍에 관한 정보를 촉각적으로 인지할 수 있고, 반면 팔꿈치에 착용할 때는 옷감형 액추에이터의 가변강성 기능을 활용해 팔꿈치의 굽힘각도에 따른 피드백을 제공하는 멀티모달(두 가지 이상의 피드백 형태로 정보를 전달) 햅틱 인터페이스로서 개발했다.
이처럼 옷감형 액추에이터를 팔목에 착용한 사용자가 가상현실 속 모빌리티 로봇 주변의 위치정보를 파악하고, 시각과 청각 정보가 제한될 때 장애물을 피해 로봇을 안정적으로 주행하는 실증에도 성공했다.
오일권 교수는 이번 연구성과를 통한 실용화 시 활용에 대해 "착용형 햅틱 인터페이스는 촉각 정보를 활용한 로봇, 무인기 제어와 메타버스가 접목된 의료·교육 등에도 활용할 수 있다"고 말했다.
한편, 이번 연구는 과학기술정보통신부(장관 이종호)와 한국연구재단이 추진하는 리더연구자(창의연구) 지원 사업으로 수행됐다. 연구 성과는 첨단 소재 분야 국제학술지 <어드밴스드 머티리얼스(Advanced Materials)>에 9월 19일 게재됐고, 연구의 우수성을 인정받아 학술지 표지 논문으로 선정됐다. (논문명: Easy-To-Wear Auxetic SMA Knot-Architecture for Spatiotemporal and Multimodal Haptic Feedbacks)
2023.11.30
조회수 8215
-
 움직이는 가상 물질을 입체적으로 쥘 수 있는 새로운 가상현실 컨트롤러 개발
우리 대학 산업디자인학과 안드리아 비앙키(Andrea Bianchi) 교수 연구팀이 회전하는 원판을 활용한 6-자유도 햅틱 컨트롤러를 개발했다고 12일 밝혔다.
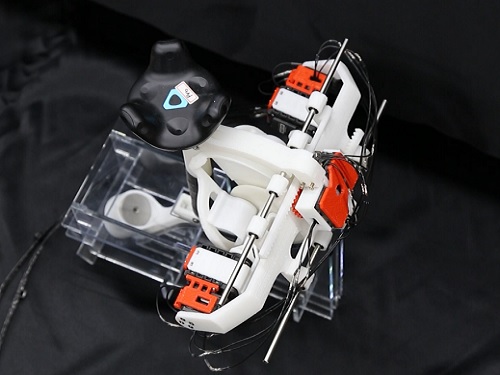
비앙키 교수 연구팀은 마이크로소프트(Microsoft Research)와 협업해 움직이는 물체의 이동 속도, 방향과 두께감을 표현하는 `SpinOchhio(스피노키오)' 컨트롤러를 개발했다. 이 컨트롤러는 한 쌍의 회전 원판과 피버팅(2차적 축 회전) 메커니즘을 활용해 가상 환경(VR Environment)에서 사용자가 엄지와 검지로 쥐고 있는 물체가 손가락 사이를 지나가는 속도, 방향과 두께의 감촉을 사실적으로 체험할 수 있게 한다.
산업디자인학과 김명진 박사과정이 제1 저자로 참여한 이번 연구는 지난 5월 4일에 `ACM CHI 2022 (2022 CHI Conference on Human Factors in Computing Systems)' 국제학회에서 발표됐다. (논문명: SpinOcchio: Understanding Haptic-Visual Congruency of Skin-Slip in VR with a Dynamic Grip Controller)
기존의 가상현실(VR) 컨트롤러는 가상 물체와의 상호작용을 표현하는 방법으로 진동 피드백만을 활용해, 손에 쥔 물체의 움직이는 속도, 방향, 또는 두께감에 대한 촉감 피드백을 표현하는 데에 한계가 있었다.
손가락으로 쥐고 있는 가상 물체의 움직임과 다양한 두께감을 사실적으로 재현하기 위해서는 각 손가락에 닿는 표면의 움직임과 표면 간의 거리를 고려해야 한다. 연구팀이 개발한 `스피노키오'는 한 쌍의 피버팅 하는 회전 원판을 엄지와 검지 각 손가락 끝에 접촉하게 함으로써, 손가락 사이에 있는 물체가 다양한 방향으로 미끄러지거나 회전하는 감각을 재현한다. 또한 연구팀은 두 원판 간의 거리를 조절함으로 가상 환경에서 실시간으로 다양한 물체의 두께와 형태의 촉감을 구현했다. 엄지와 검지 각 손가락 끝에 접촉한 표면의 움직이는 방향(1), 속도(2)와 폭(3)을 개별적으로 제어하여 `스피노키오'는 총 6-자유도 햅틱 피드백을 구현한다.
연구팀은 `스피노키오'를 활용해 표면의 움직임의 방향 변화에 대한 사용자들의 인지능력을 측정했고, 가상 물체를 재현했을 때 가상현실의 시각적 피드백이 촉각 피드백 인지에 큰 영향을 끼치는 것을 실험적으로 확인했다.
`스피노키오'의 활용 예시로 연구팀은 가상 환경에서 사용자가 손가락으로 힘을 주어 물체를 집어 올리거나 잡아당기거나 꼬집어 변형시키는 상호작용과 더불어 힘을 빼고 물체를 쓰다듬거나 떨어뜨리는 등 다양한 물체와의 상호작용을 제안했다.
연구를 주도한 안드리아 비앙키 교수는 "이번에 개발한 스피노키오는 이전과 달리 사용자가 움직이는 가상의 물체를 입체적으로 손으로 쥐는 햅틱 경험을 구현한 특징이 있으며, 3D 모델링 작업과 가상 교육 환경 등에 특히 응용되어 산업적 가치를 지닌다ˮ라고 설명했다.
한편 이번 연구는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원을 받아 수행됐다.
움직이는 가상 물질을 입체적으로 쥘 수 있는 새로운 가상현실 컨트롤러 개발
우리 대학 산업디자인학과 안드리아 비앙키(Andrea Bianchi) 교수 연구팀이 회전하는 원판을 활용한 6-자유도 햅틱 컨트롤러를 개발했다고 12일 밝혔다.
비앙키 교수 연구팀은 마이크로소프트(Microsoft Research)와 협업해 움직이는 물체의 이동 속도, 방향과 두께감을 표현하는 `SpinOchhio(스피노키오)' 컨트롤러를 개발했다. 이 컨트롤러는 한 쌍의 회전 원판과 피버팅(2차적 축 회전) 메커니즘을 활용해 가상 환경(VR Environment)에서 사용자가 엄지와 검지로 쥐고 있는 물체가 손가락 사이를 지나가는 속도, 방향과 두께의 감촉을 사실적으로 체험할 수 있게 한다.
산업디자인학과 김명진 박사과정이 제1 저자로 참여한 이번 연구는 지난 5월 4일에 `ACM CHI 2022 (2022 CHI Conference on Human Factors in Computing Systems)' 국제학회에서 발표됐다. (논문명: SpinOcchio: Understanding Haptic-Visual Congruency of Skin-Slip in VR with a Dynamic Grip Controller)
기존의 가상현실(VR) 컨트롤러는 가상 물체와의 상호작용을 표현하는 방법으로 진동 피드백만을 활용해, 손에 쥔 물체의 움직이는 속도, 방향, 또는 두께감에 대한 촉감 피드백을 표현하는 데에 한계가 있었다.
손가락으로 쥐고 있는 가상 물체의 움직임과 다양한 두께감을 사실적으로 재현하기 위해서는 각 손가락에 닿는 표면의 움직임과 표면 간의 거리를 고려해야 한다. 연구팀이 개발한 `스피노키오'는 한 쌍의 피버팅 하는 회전 원판을 엄지와 검지 각 손가락 끝에 접촉하게 함으로써, 손가락 사이에 있는 물체가 다양한 방향으로 미끄러지거나 회전하는 감각을 재현한다. 또한 연구팀은 두 원판 간의 거리를 조절함으로 가상 환경에서 실시간으로 다양한 물체의 두께와 형태의 촉감을 구현했다. 엄지와 검지 각 손가락 끝에 접촉한 표면의 움직이는 방향(1), 속도(2)와 폭(3)을 개별적으로 제어하여 `스피노키오'는 총 6-자유도 햅틱 피드백을 구현한다.
연구팀은 `스피노키오'를 활용해 표면의 움직임의 방향 변화에 대한 사용자들의 인지능력을 측정했고, 가상 물체를 재현했을 때 가상현실의 시각적 피드백이 촉각 피드백 인지에 큰 영향을 끼치는 것을 실험적으로 확인했다.
`스피노키오'의 활용 예시로 연구팀은 가상 환경에서 사용자가 손가락으로 힘을 주어 물체를 집어 올리거나 잡아당기거나 꼬집어 변형시키는 상호작용과 더불어 힘을 빼고 물체를 쓰다듬거나 떨어뜨리는 등 다양한 물체와의 상호작용을 제안했다.
연구를 주도한 안드리아 비앙키 교수는 "이번에 개발한 스피노키오는 이전과 달리 사용자가 움직이는 가상의 물체를 입체적으로 손으로 쥐는 햅틱 경험을 구현한 특징이 있으며, 3D 모델링 작업과 가상 교육 환경 등에 특히 응용되어 산업적 가치를 지닌다ˮ라고 설명했다.
한편 이번 연구는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원을 받아 수행됐다.
2022.05.12
조회수 8977
-
 액정화면 깨뜨리지 않고 부드럽게 터치하는 인공손가락 개발
우리 대학 연구진이 액정 같이 깨어지기 쉬운 화면을 부드럽게 터치해 다양한 작업을 할 수 있는 인공손가락을 선보였다.
기계공학과 오일권 교수 연구팀이 스마트폰이나 햅틱 반응형 디스플레이를 정교하게 터치할 수 있는 소프트 터치 액츄에이터 기술을 개발했다고 밝혔다.
연구팀은 부드럽고 얇은 박막형의 소프트 터치 *액츄에이터를 원격으로 조정, 스마트폰 화면 위에서 전자피아노 연주하기, 전자책 넘기기, 화면스크롤하기 등을 시연해냈다.
※ 액츄에이터 : 전기적 신호를 기계적 운동으로 변환하는 장치
일종의 디지털 촉각인 ‘햅틱’을 구현, 사람 또는 전자디바이스와 섬세한 피드백을 주고받는 한편 가상현실이나 증강현실을 보다 실감나게 하려는 연구가 활발하다.
주로 부드러운 인공근육 기반 소프트 액츄에이터에 대한 연구가 많이 이뤄지고 있지만, 낮은 전압에서는 반응속도가 너무 느려 터치형 액츄에이터로 활용하기에 어려움이 있었다.
인체에 나쁜 영향을 주거나 디바이스의 오작동을 유발하지 않으면서 터치 피드백을 주고받기 위해서는 저전압 구동이 전제되어야 하기 때문이다.
이에 연구팀은 저전압에서도 빠르게 반응할 수 있는 높은 효율의 소프트 액츄에이터를 위한 새로운 소재를 물색하였다.
유연성을 위해 금속을 배제한 공유결합으로 된 다공성 고리화합물(*트라이어진 고리)을 합성하고 널리 쓰이는 전도성 고분자(PE DOT-PSS)를 결합했다.
※ 트라이어진 고리(Covalent Triazine Framework, CTF) : 다공성 내인성 미세조도(PIM-1) 고분자로 이루어진 물질
실제 이 소재의 액츄에이터로 만든 인공손가락은 낮은 전압(±0.5V)으로도 빠르게 큰 변형을 만들 수 있어 부드러운 터치반응을 유도할 수 있었다.
핵심은 다공성 탄소구조체로 인해 비표면적을 극대화한 것이다. 비표적을 넓혀 표면전하량을 늘리는 한편 작동속도와 반응성도 높일 수 있었다. 실제 0.5V에서 17mm 정도 구부러지는 변형을 확인했다.
개발된 소프트 터치 액츄에이터를 배열형태로 확장하여 스마트폰 전자피아노 어플리케이션 위에서 연속적 터치를 통해서‘Happy Birthday’를 연주하였으며 전자책넘기기와 화면스크롤 기능 등을 구현했다.
과학기술정보통신부와 한국연구재단이 추진하는 리더연구사업(창의연구)의 지원으로 수행된 이번 연구의 성과는 국제학술지 ‘네이처 커뮤니케이션스(Nature Communications)’에 10월 23일 게재됐다.
액정화면 깨뜨리지 않고 부드럽게 터치하는 인공손가락 개발
우리 대학 연구진이 액정 같이 깨어지기 쉬운 화면을 부드럽게 터치해 다양한 작업을 할 수 있는 인공손가락을 선보였다.
기계공학과 오일권 교수 연구팀이 스마트폰이나 햅틱 반응형 디스플레이를 정교하게 터치할 수 있는 소프트 터치 액츄에이터 기술을 개발했다고 밝혔다.
연구팀은 부드럽고 얇은 박막형의 소프트 터치 *액츄에이터를 원격으로 조정, 스마트폰 화면 위에서 전자피아노 연주하기, 전자책 넘기기, 화면스크롤하기 등을 시연해냈다.
※ 액츄에이터 : 전기적 신호를 기계적 운동으로 변환하는 장치
일종의 디지털 촉각인 ‘햅틱’을 구현, 사람 또는 전자디바이스와 섬세한 피드백을 주고받는 한편 가상현실이나 증강현실을 보다 실감나게 하려는 연구가 활발하다.
주로 부드러운 인공근육 기반 소프트 액츄에이터에 대한 연구가 많이 이뤄지고 있지만, 낮은 전압에서는 반응속도가 너무 느려 터치형 액츄에이터로 활용하기에 어려움이 있었다.
인체에 나쁜 영향을 주거나 디바이스의 오작동을 유발하지 않으면서 터치 피드백을 주고받기 위해서는 저전압 구동이 전제되어야 하기 때문이다.
이에 연구팀은 저전압에서도 빠르게 반응할 수 있는 높은 효율의 소프트 액츄에이터를 위한 새로운 소재를 물색하였다.
유연성을 위해 금속을 배제한 공유결합으로 된 다공성 고리화합물(*트라이어진 고리)을 합성하고 널리 쓰이는 전도성 고분자(PE DOT-PSS)를 결합했다.
※ 트라이어진 고리(Covalent Triazine Framework, CTF) : 다공성 내인성 미세조도(PIM-1) 고분자로 이루어진 물질
실제 이 소재의 액츄에이터로 만든 인공손가락은 낮은 전압(±0.5V)으로도 빠르게 큰 변형을 만들 수 있어 부드러운 터치반응을 유도할 수 있었다.
핵심은 다공성 탄소구조체로 인해 비표면적을 극대화한 것이다. 비표적을 넓혀 표면전하량을 늘리는 한편 작동속도와 반응성도 높일 수 있었다. 실제 0.5V에서 17mm 정도 구부러지는 변형을 확인했다.
개발된 소프트 터치 액츄에이터를 배열형태로 확장하여 스마트폰 전자피아노 어플리케이션 위에서 연속적 터치를 통해서‘Happy Birthday’를 연주하였으며 전자책넘기기와 화면스크롤 기능 등을 구현했다.
과학기술정보통신부와 한국연구재단이 추진하는 리더연구사업(창의연구)의 지원으로 수행된 이번 연구의 성과는 국제학술지 ‘네이처 커뮤니케이션스(Nature Communications)’에 10월 23일 게재됐다.
2020.11.05
조회수 34302