%EA%B2%BD%EA%B8%B0%EC%9A%B1
-
 피부에 부착할 수 있는 촉감 전달 패치 개발
기계공학과 경기욱 교수 연구팀이 피부에 부착하여 다양한 촉감을 전달할 수 있는 초경량의 얇고 유연한 인공근육기반 촉감 전달 패치를 개발했다. 최근 가상현실(virtual reality, VR)과 증강현실(augmented reality, AR)의 기술이 각광받으면서, 더욱 현실감을 증대시키기 위해서 시각과 청각뿐만 아니라 촉각을 전달하는 기술이 중요한 역할을 하고 있다. 또한 사용자가 로봇을 원격조종하여 세밀한 작업을 하기 위해서는, 세밀한 촉감 전달이 필요하다. 그러나 단순한 진동이나 압력을 넘어서, 세밀하고 다양한 촉감을 전달할 수 있는 기술은 여전히 큰 도전이다.
개발된 촉감 구동기는 지름 6 mm, 두께 1.1 mm로 매우 작고 얇은 구조임에도 불구하고, 압력에서부터 고주파 진동까지 다양한 촉감을 전달할 수 있다. 또한 개발된 구동기는 32 mg 의 매우 가벼운 무게에도 불구하고 25 g의 추를 빠르게 밀어 올릴 수 있을 정도로 높은 출력밀도를 갖고 있다.
연구팀은 이 구동기를 손가락 끝 좁은 크기에 다수 배열하여 개별적으로 제어함으로써 다양한 촉감을 생성할 수 있는 햅틱 패치를 개발했다. 개발된 촉감 전달 패치는 얇고 유연하여 피부에 쉽게 부착되며, 가상 환경 속 물체의 3차원 형상과 표면질감을 정교하게 구현할 수 있다. 이 기술은 가상/증강 현실에서의 새로운 상호작용 방식을 제시하며, 차세대 촉감 전달 장치로서뿐만 아니라 초소형 로봇 등 다양한 분야에서도 활용될 것으로 기대된다.
본 연구는 졸업생 윤정환 박사의 박사학위 논문 연구로, 연구 결과는 지난 3월 국제학술지 ‘사이언스 어드벤시스(Science Advances)’ Vol.11(12)에 게재됐다. (논문명: Skin-attached haptic patch for versatile and augmented tactile interaction) 본 연구는 ETRI, UCLA와 공동으로 수행되었으며, 국가과학기술연구회(CRC23021-000) 및 한국전자통신연구원(24YB1700)의 지원을 받았다.
2025.03.28 조회수 3051
피부에 부착할 수 있는 촉감 전달 패치 개발
기계공학과 경기욱 교수 연구팀이 피부에 부착하여 다양한 촉감을 전달할 수 있는 초경량의 얇고 유연한 인공근육기반 촉감 전달 패치를 개발했다. 최근 가상현실(virtual reality, VR)과 증강현실(augmented reality, AR)의 기술이 각광받으면서, 더욱 현실감을 증대시키기 위해서 시각과 청각뿐만 아니라 촉각을 전달하는 기술이 중요한 역할을 하고 있다. 또한 사용자가 로봇을 원격조종하여 세밀한 작업을 하기 위해서는, 세밀한 촉감 전달이 필요하다. 그러나 단순한 진동이나 압력을 넘어서, 세밀하고 다양한 촉감을 전달할 수 있는 기술은 여전히 큰 도전이다.
개발된 촉감 구동기는 지름 6 mm, 두께 1.1 mm로 매우 작고 얇은 구조임에도 불구하고, 압력에서부터 고주파 진동까지 다양한 촉감을 전달할 수 있다. 또한 개발된 구동기는 32 mg 의 매우 가벼운 무게에도 불구하고 25 g의 추를 빠르게 밀어 올릴 수 있을 정도로 높은 출력밀도를 갖고 있다.
연구팀은 이 구동기를 손가락 끝 좁은 크기에 다수 배열하여 개별적으로 제어함으로써 다양한 촉감을 생성할 수 있는 햅틱 패치를 개발했다. 개발된 촉감 전달 패치는 얇고 유연하여 피부에 쉽게 부착되며, 가상 환경 속 물체의 3차원 형상과 표면질감을 정교하게 구현할 수 있다. 이 기술은 가상/증강 현실에서의 새로운 상호작용 방식을 제시하며, 차세대 촉감 전달 장치로서뿐만 아니라 초소형 로봇 등 다양한 분야에서도 활용될 것으로 기대된다.
본 연구는 졸업생 윤정환 박사의 박사학위 논문 연구로, 연구 결과는 지난 3월 국제학술지 ‘사이언스 어드벤시스(Science Advances)’ Vol.11(12)에 게재됐다. (논문명: Skin-attached haptic patch for versatile and augmented tactile interaction) 본 연구는 ETRI, UCLA와 공동으로 수행되었으며, 국가과학기술연구회(CRC23021-000) 및 한국전자통신연구원(24YB1700)의 지원을 받았다.
2025.03.28 조회수 3051 -
 경기욱 교수 연구팀, 3차원으로 변하는 모핑 구동기 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발했다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 최근 연구팀은 전기 활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
연구팀의 모핑 구동기는 전기유압식 구동(electrohydraulic actuation) 원리를 이용한다. 전극과 PVC 젤 복합체 사이에 전기장을 가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑(electrostatic zipping)이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 유체의 흐름을 제어할 수 있으며, 이를 통해 다양한 형상을 표현할 수 있다.
연구팀이 개발한 모핑 구동기는 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 표면에서 고속으로 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이번 연구 결과는 국제학술지 ‘사이언스 어드밴시스(Science Advances)’Vol.10(39)에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator)
또한 본 연구는 지난 8월 한국햅틱스학술대회에서 최우수논문상을 수상했다. 한편 본 연구는 국가과학기술연구회(CRC23021-000), 삼성미래기술육성재단(SRFC-IT2102-04), 한국전자통신연구원(24YB1700)의 지원으로 수행됐다.
2024.09.30 조회수 5366
경기욱 교수 연구팀, 3차원으로 변하는 모핑 구동기 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발했다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 최근 연구팀은 전기 활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
연구팀의 모핑 구동기는 전기유압식 구동(electrohydraulic actuation) 원리를 이용한다. 전극과 PVC 젤 복합체 사이에 전기장을 가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑(electrostatic zipping)이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 유체의 흐름을 제어할 수 있으며, 이를 통해 다양한 형상을 표현할 수 있다.
연구팀이 개발한 모핑 구동기는 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 표면에서 고속으로 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이번 연구 결과는 국제학술지 ‘사이언스 어드밴시스(Science Advances)’Vol.10(39)에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator)
또한 본 연구는 지난 8월 한국햅틱스학술대회에서 최우수논문상을 수상했다. 한편 본 연구는 국가과학기술연구회(CRC23021-000), 삼성미래기술육성재단(SRFC-IT2102-04), 한국전자통신연구원(24YB1700)의 지원으로 수행됐다.
2024.09.30 조회수 5366 -
 발걸음만으로 태양광 패널의 먼지를 제거하는 기술 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 발걸음에서 얻어지는 충격 에너지를 전기 에너지로 변환해 태양광 패널의 먼지를 제거하는 기술을 개발했다고 4일 밝혔다.
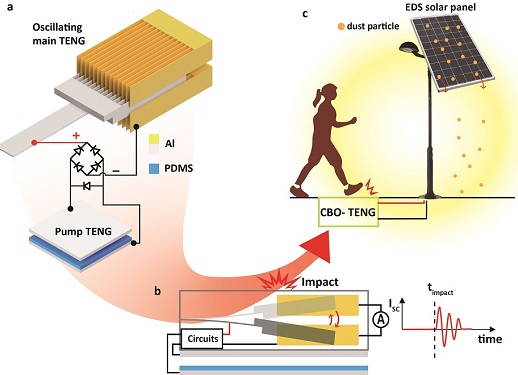
탄소 중립 실현을 위해 태양광 발전의 중요성이 커지고 있다. 태양광 패널은 표면의 먼지로 효율이 점점 낮아지는 문제가 있기 때문에 주기적인 세척이 필요하다. 하지만 손이 닿지 않거나 도심에 분산되어있는 태양광 패널을 일일이 청소하는 것은 어려운 실정이다. 연구팀은 문제 해결을 위해, 마찰전기 발전기(triboelectric nanogenerator)와 전기력 기반 먼지 제거 방식(elelctrodynamic dust shield)을 사용하여 보행자의 걸음에서 생기는 충격만으로 태양광 패널을 청소하는 방법을 개발했다.
먼지 제거 태양광 패널은 표면에 깍지 형태의 전극이 배치된 구조로, 교류 고전압을 가했을 시 진동하는 강한 전기력으로 먼지를 털어낸다. 강한 전기장을 만들어야 하는 특성상, 작동에 수 kV의 교류 고전압이 필요하다. 마찰전기 발전기는 친환경 에너지 하베스터 중 하나로, 두 물체를 마찰시켜 생기는 정전기를 이용해 고전압 출력이 나오는 특징이 있다. 하지만 마찰전기 발전기 작동 원리상 마찰이 필수적이기 때문에 발걸음과 같은 충격에 대해서 에너지 전환 효율이 낮으며, 오래 지속되는 고압의 전류 얻을 수 없다는 단점이 있다. 연구팀은 외팔보 구조와 전하 충전구조를 적용해 충격을 가했을 때 에너지의 손실 없이 진동하며 교류 고전압을 장시간(약 10초/회) 동안 발생시키는 마찰전기 발전기를 개발하였다. 개발된 마찰전기 발전기는 약 50.8%의 높은 에너지변환 효율을 보여주었으며, 최대 전압 2.6kVpp (약 17Hz)로 먼지 제거 패널을 충분히 작동시킬 수준의 높은 출력을 발생시킬 수 있음을 확인하였다. 연구팀은 12번의 발걸음을 걷는 동안 태양광 패널의 표면 먼지의 약 79.2%를 제거하였으며, 이 결과 태양광 패널의 출력이 증가함도 확인했다.
연구팀이 개발한 마찰전기 발전기를 이용한 태양광 패널 먼지 제거 방법은 사람들이 태양광 패널 주변을 걸어 다니는 것만으로도 세척이 힘든 도심 속 태양광 패널을 청소하는 친환경적인 방법이 될 수 있다.
이번 연구는 정부의 재원으로 한국 연구재단과 정보통신기획평가원의 지원을 받아 수행된 연구이며 우수 국제학술지인 나노 에너지 (Nano Energy)에 2022년 9월 22일 온라인 게재되었다. (논문명 : Highly efficient long-lasting triboelectric nanogenerator upon impact and its application to daily-life self-cleaning solar panel, 제1 저자 박사과정 마지형) 본 연구는 우리 대학 기계공학과 졸업생인 한국기술교육대학의 박진형 교수팀과 공동으로 수행됐다.
연구 내용 영상 : https://www.youtube.com/watch?v=wvaltw15iVI
2022.10.04 조회수 9485
발걸음만으로 태양광 패널의 먼지를 제거하는 기술 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 발걸음에서 얻어지는 충격 에너지를 전기 에너지로 변환해 태양광 패널의 먼지를 제거하는 기술을 개발했다고 4일 밝혔다.
탄소 중립 실현을 위해 태양광 발전의 중요성이 커지고 있다. 태양광 패널은 표면의 먼지로 효율이 점점 낮아지는 문제가 있기 때문에 주기적인 세척이 필요하다. 하지만 손이 닿지 않거나 도심에 분산되어있는 태양광 패널을 일일이 청소하는 것은 어려운 실정이다. 연구팀은 문제 해결을 위해, 마찰전기 발전기(triboelectric nanogenerator)와 전기력 기반 먼지 제거 방식(elelctrodynamic dust shield)을 사용하여 보행자의 걸음에서 생기는 충격만으로 태양광 패널을 청소하는 방법을 개발했다.
먼지 제거 태양광 패널은 표면에 깍지 형태의 전극이 배치된 구조로, 교류 고전압을 가했을 시 진동하는 강한 전기력으로 먼지를 털어낸다. 강한 전기장을 만들어야 하는 특성상, 작동에 수 kV의 교류 고전압이 필요하다. 마찰전기 발전기는 친환경 에너지 하베스터 중 하나로, 두 물체를 마찰시켜 생기는 정전기를 이용해 고전압 출력이 나오는 특징이 있다. 하지만 마찰전기 발전기 작동 원리상 마찰이 필수적이기 때문에 발걸음과 같은 충격에 대해서 에너지 전환 효율이 낮으며, 오래 지속되는 고압의 전류 얻을 수 없다는 단점이 있다. 연구팀은 외팔보 구조와 전하 충전구조를 적용해 충격을 가했을 때 에너지의 손실 없이 진동하며 교류 고전압을 장시간(약 10초/회) 동안 발생시키는 마찰전기 발전기를 개발하였다. 개발된 마찰전기 발전기는 약 50.8%의 높은 에너지변환 효율을 보여주었으며, 최대 전압 2.6kVpp (약 17Hz)로 먼지 제거 패널을 충분히 작동시킬 수준의 높은 출력을 발생시킬 수 있음을 확인하였다. 연구팀은 12번의 발걸음을 걷는 동안 태양광 패널의 표면 먼지의 약 79.2%를 제거하였으며, 이 결과 태양광 패널의 출력이 증가함도 확인했다.
연구팀이 개발한 마찰전기 발전기를 이용한 태양광 패널 먼지 제거 방법은 사람들이 태양광 패널 주변을 걸어 다니는 것만으로도 세척이 힘든 도심 속 태양광 패널을 청소하는 친환경적인 방법이 될 수 있다.
이번 연구는 정부의 재원으로 한국 연구재단과 정보통신기획평가원의 지원을 받아 수행된 연구이며 우수 국제학술지인 나노 에너지 (Nano Energy)에 2022년 9월 22일 온라인 게재되었다. (논문명 : Highly efficient long-lasting triboelectric nanogenerator upon impact and its application to daily-life self-cleaning solar panel, 제1 저자 박사과정 마지형) 본 연구는 우리 대학 기계공학과 졸업생인 한국기술교육대학의 박진형 교수팀과 공동으로 수행됐다.
연구 내용 영상 : https://www.youtube.com/watch?v=wvaltw15iVI
2022.10.04 조회수 9485 -
 자체 무게의 480배 이상을 들어올릴 수 있는 소프트 그리퍼 개발
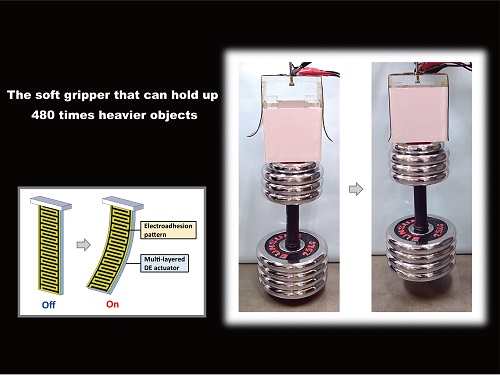
우리 대학 기계공학과 경기욱 교수 연구팀이 자체 무게의 480배 이상의 중량을 들어올릴 수 있는 소프트 그리퍼를 개발했다.
연구팀에서 개발한 그리퍼는 인공근육과 전기접착식피부를 결합한 초경량 그리퍼로서, 가벼운 인공근육을 이용해 쥐고자 하는 물체에 접촉한 후 강력한 전기접착력을 발생시켜 무거운 물체를 들어올릴 수 있도록 한다. 제작된 소프트 그리퍼는 6.2g의 가벼운 무게를 가지지만 625g의 무게까지 쥐고 이송시킬 수 있으며, 대면적으로 제작된 35g의 그리퍼는 자체 무게의 480배 이상인 16.8kg까지 집어올릴 수 있다.
연구팀은 이번 연구에서 폴리머 기반의 액추에이터를 인공근육으로 사용했기 때문에 매우 가벼운 무게의 소프트 그리퍼를 구현할 수 있었다. 폴리머 기반의 액추에이터는 높은 유전율을 가지는 얇은 탄성체의 양면에 신축성이 있는 전극을 도포하여 제작됐다. 양면의 전극에 전압을 가해주면 전극 사이의 인력이 발생하여 탄성체를 두께 방향으로 누르게 되고, 결과적으로 면 방향의 팽창이 발생하는 원리를 사용했다. 연구팀은 이러한 작동원리를 소프트 그리퍼에 응용하기 위해 팽창 변형을 굽힘 변형으로 변환해주는 기계적 구조를 도입했다.
연구팀은 인공근육을 사용해 그리퍼를 초경량으로 제작함과 동시에, 무거운 물체를 들어올릴 수 있도록 전기접착식피부를 적용했다. 전기접착식피부의 내부에는 접착력을 발생시키기 위한 전극이 반복적으로 배치되어 있으며, 피부의 표면에는 전기적 절연층이 코팅돼있다. 전기접착식피부가 물체와 접촉한 후 반복적으로 배치된 전극에 전압이 가해지면, 접촉한 물체의 표면에 전기접착식피부의 전극과 반대된 전하가 유도된다. 결과적으로 전기접착식피부의 전극과 물체 표면에 유도된 전하 사이에 전기적 인력이 생성돼 그리퍼와 대상 물체 사이에 높은 접착력을 발생시킬 수 있다.
연구팀에서는 소프트 그리퍼의 성능을 극대화하기 위해 인공근육 및 전기접착식피부의 구조, 규격, 소재를 실험적으로 최적화했다. 그 결과 연구팀에서 개발한 소프트 그리퍼는 두 개의 손가락만을 이용하지만 원기둥, 구, 육면체, 평평한 물체, 포장재, 비정형 물체 등 다양한 형상의 물체를 집어올리고 이송할 수 있으면서도, 자체 무게의 480배에 달하는 무게까지 들어올릴 수 있다.
연구팀이 개발한 소프트 그리퍼는 손으로 쥐기 어려운 평평한 모양부터 다양한 입체 모양의 물체를 모두 집을 수 있다는 장점이 있기 때문에, 로봇핸드를 교체하지 않고도 다양한 모양의 물체를 다루는 작업을 연속적으로 수행할 수 있을 것으로 기대된다. 또한, 경량화된 소프트 그리퍼를 사용함으로써 로봇팔에 가해지는 부하를 줄일 수 있고, 그 결과 기존의 로봇 그리퍼를 사용한 경우보다 더 무거운 물체를 이송시키는 것을 가능하게 할 수 있다.
관련 연구를 주도적으로 수행한 박사과정 황건우 학생은 이번 연구를 Instruments 분야 Top (상위 1%) 학술지인 IEEE Trans. Industrial Electronics를 포함해Smart Materials and Structures 등에 총 2편의 논문을 게재했다. (논문명: Electroadhesion-Based High-Payload Soft Gripper With Mechanically Strengthened Structure / Improved electroadhesive force by using fumed alumina/PDMS composites)
이번 연구는 한국산업기술평가관리원의 산업핵심기술개발사업 및 로봇산업핵심기술개발사업(알키미스트 프로젝트)의 지원을 받아 수행됐다.
2021.03.09 조회수 94545
자체 무게의 480배 이상을 들어올릴 수 있는 소프트 그리퍼 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 자체 무게의 480배 이상의 중량을 들어올릴 수 있는 소프트 그리퍼를 개발했다.
연구팀에서 개발한 그리퍼는 인공근육과 전기접착식피부를 결합한 초경량 그리퍼로서, 가벼운 인공근육을 이용해 쥐고자 하는 물체에 접촉한 후 강력한 전기접착력을 발생시켜 무거운 물체를 들어올릴 수 있도록 한다. 제작된 소프트 그리퍼는 6.2g의 가벼운 무게를 가지지만 625g의 무게까지 쥐고 이송시킬 수 있으며, 대면적으로 제작된 35g의 그리퍼는 자체 무게의 480배 이상인 16.8kg까지 집어올릴 수 있다.
연구팀은 이번 연구에서 폴리머 기반의 액추에이터를 인공근육으로 사용했기 때문에 매우 가벼운 무게의 소프트 그리퍼를 구현할 수 있었다. 폴리머 기반의 액추에이터는 높은 유전율을 가지는 얇은 탄성체의 양면에 신축성이 있는 전극을 도포하여 제작됐다. 양면의 전극에 전압을 가해주면 전극 사이의 인력이 발생하여 탄성체를 두께 방향으로 누르게 되고, 결과적으로 면 방향의 팽창이 발생하는 원리를 사용했다. 연구팀은 이러한 작동원리를 소프트 그리퍼에 응용하기 위해 팽창 변형을 굽힘 변형으로 변환해주는 기계적 구조를 도입했다.
연구팀은 인공근육을 사용해 그리퍼를 초경량으로 제작함과 동시에, 무거운 물체를 들어올릴 수 있도록 전기접착식피부를 적용했다. 전기접착식피부의 내부에는 접착력을 발생시키기 위한 전극이 반복적으로 배치되어 있으며, 피부의 표면에는 전기적 절연층이 코팅돼있다. 전기접착식피부가 물체와 접촉한 후 반복적으로 배치된 전극에 전압이 가해지면, 접촉한 물체의 표면에 전기접착식피부의 전극과 반대된 전하가 유도된다. 결과적으로 전기접착식피부의 전극과 물체 표면에 유도된 전하 사이에 전기적 인력이 생성돼 그리퍼와 대상 물체 사이에 높은 접착력을 발생시킬 수 있다.
연구팀에서는 소프트 그리퍼의 성능을 극대화하기 위해 인공근육 및 전기접착식피부의 구조, 규격, 소재를 실험적으로 최적화했다. 그 결과 연구팀에서 개발한 소프트 그리퍼는 두 개의 손가락만을 이용하지만 원기둥, 구, 육면체, 평평한 물체, 포장재, 비정형 물체 등 다양한 형상의 물체를 집어올리고 이송할 수 있으면서도, 자체 무게의 480배에 달하는 무게까지 들어올릴 수 있다.
연구팀이 개발한 소프트 그리퍼는 손으로 쥐기 어려운 평평한 모양부터 다양한 입체 모양의 물체를 모두 집을 수 있다는 장점이 있기 때문에, 로봇핸드를 교체하지 않고도 다양한 모양의 물체를 다루는 작업을 연속적으로 수행할 수 있을 것으로 기대된다. 또한, 경량화된 소프트 그리퍼를 사용함으로써 로봇팔에 가해지는 부하를 줄일 수 있고, 그 결과 기존의 로봇 그리퍼를 사용한 경우보다 더 무거운 물체를 이송시키는 것을 가능하게 할 수 있다.
관련 연구를 주도적으로 수행한 박사과정 황건우 학생은 이번 연구를 Instruments 분야 Top (상위 1%) 학술지인 IEEE Trans. Industrial Electronics를 포함해Smart Materials and Structures 등에 총 2편의 논문을 게재했다. (논문명: Electroadhesion-Based High-Payload Soft Gripper With Mechanically Strengthened Structure / Improved electroadhesive force by using fumed alumina/PDMS composites)
이번 연구는 한국산업기술평가관리원의 산업핵심기술개발사업 및 로봇산업핵심기술개발사업(알키미스트 프로젝트)의 지원을 받아 수행됐다.
2021.03.09 조회수 94545