-
 KAIST, POSTECH 공동연구팀 전자의 입자-파동 이중성에 대한 새로운 이론 발표
- 비평형 상태에서의 물질특성 규명에 도움 기대- 미국 물리학회 피지컬 리뷰 포커스 프로그램에 소개
반도체에 형성된 가는 선 모양 구조에서의 전자 움직임을 공동 연구한 KAIST(총장 서남표) 물리학과 심흥선(沈興善, 35) 교수와 대학원생 윤석찬(尹錫燦, 25)씨, 포스텍(총장 백성기) 물리학과 이현우(李鉉雨, 39) 교수팀은 최근 미국 물리학분야 학술지(Physical Review Letters)를 통하여 전자의 입자-파동 이중성에 대한 새로운 이론을 발표했다고 밝혔다.
이 논문의 결과는 전자의 입자-파동 이중성에 대한 많은 학자들의 예상을 벗어난 결과로 거의 동시에 비슷한 결과를 얻은 이스라엘 학자들의 논문과 같이 지난 22일자 미국 물리학회 피지컬 리뷰 포커스(Physical Review Focus)에 소개되었다. 이 프로그램은 미국물리학회에서 출간하는 여러 학술지에 매월 게재되는 천 편 이상의 논문들 중 과학계 전반에 특별 소개가 필요하다고 판단되는 논문을 한 달에 5편 내외를 골라 논문의 내용과 가치를 전문가의 평과 함께 소개하고 있다.
전자와 같은 입자들이 야구공과 같은 입자처럼 행동할 수도 있지만 어떤 경우에 음파나 빛과 같이 파동처럼 행동할 수도 있다는 양자물리학의 입자-파동 이중성 이론이 많은 학자들이 생각했던 것보다 복잡하다는 사실이 이번 공동연구를 통해 밝혀졌다. 입자-파동 이중성은 원자의 성질뿐 아니라 금속이나 반도체와 같은 여러 물질의 특성에 영향을 미치는 중요 요인으로 이 발견은 양자물리학의 효과가 강하게 나타나는 저온에서의 물질 특성들, 특히 비평형 상태에서의 물질 특성을 규명하는데 도움이 될 것으로 기대된다.
전자들 간에는 서로 밀어내는 강한 전기력이 작용하고 이 전기력을 통해서 각 전자들은 다른 전자들의 위치를 어느 정도 파악할 수 있다. 이제까지 많은 학자들은 전기력이 강해질수록(예를 들어 전자간의 거리가 작아져서) 전자 위치가 더 정확히 파악되고 이로 인해 파동성이 약해지고 입자성이 강해질 것으로 믿어왔다. 그런데 이번 공동논문에 의하면 전기력이 강해질 때 어느 한계까지는 파동성이 점점 약해지지만 전기력의 세기가 이 한계를 넘어서고 나면 파동성이 다시 강해지고, 전기력의 크기가 더 커져 두 번째 한계를 넘고 나면 파동성이 다시 약해지는 형태로, 파동성의 세기가 전기력의 세기에 따라 진동할 수 있다고 한다.
KAIST, POSTECH 공동연구팀 전자의 입자-파동 이중성에 대한 새로운 이론 발표
- 비평형 상태에서의 물질특성 규명에 도움 기대- 미국 물리학회 피지컬 리뷰 포커스 프로그램에 소개
반도체에 형성된 가는 선 모양 구조에서의 전자 움직임을 공동 연구한 KAIST(총장 서남표) 물리학과 심흥선(沈興善, 35) 교수와 대학원생 윤석찬(尹錫燦, 25)씨, 포스텍(총장 백성기) 물리학과 이현우(李鉉雨, 39) 교수팀은 최근 미국 물리학분야 학술지(Physical Review Letters)를 통하여 전자의 입자-파동 이중성에 대한 새로운 이론을 발표했다고 밝혔다.
이 논문의 결과는 전자의 입자-파동 이중성에 대한 많은 학자들의 예상을 벗어난 결과로 거의 동시에 비슷한 결과를 얻은 이스라엘 학자들의 논문과 같이 지난 22일자 미국 물리학회 피지컬 리뷰 포커스(Physical Review Focus)에 소개되었다. 이 프로그램은 미국물리학회에서 출간하는 여러 학술지에 매월 게재되는 천 편 이상의 논문들 중 과학계 전반에 특별 소개가 필요하다고 판단되는 논문을 한 달에 5편 내외를 골라 논문의 내용과 가치를 전문가의 평과 함께 소개하고 있다.
전자와 같은 입자들이 야구공과 같은 입자처럼 행동할 수도 있지만 어떤 경우에 음파나 빛과 같이 파동처럼 행동할 수도 있다는 양자물리학의 입자-파동 이중성 이론이 많은 학자들이 생각했던 것보다 복잡하다는 사실이 이번 공동연구를 통해 밝혀졌다. 입자-파동 이중성은 원자의 성질뿐 아니라 금속이나 반도체와 같은 여러 물질의 특성에 영향을 미치는 중요 요인으로 이 발견은 양자물리학의 효과가 강하게 나타나는 저온에서의 물질 특성들, 특히 비평형 상태에서의 물질 특성을 규명하는데 도움이 될 것으로 기대된다.
전자들 간에는 서로 밀어내는 강한 전기력이 작용하고 이 전기력을 통해서 각 전자들은 다른 전자들의 위치를 어느 정도 파악할 수 있다. 이제까지 많은 학자들은 전기력이 강해질수록(예를 들어 전자간의 거리가 작아져서) 전자 위치가 더 정확히 파악되고 이로 인해 파동성이 약해지고 입자성이 강해질 것으로 믿어왔다. 그런데 이번 공동논문에 의하면 전기력이 강해질 때 어느 한계까지는 파동성이 점점 약해지지만 전기력의 세기가 이 한계를 넘어서고 나면 파동성이 다시 강해지고, 전기력의 크기가 더 커져 두 번째 한계를 넘고 나면 파동성이 다시 약해지는 형태로, 파동성의 세기가 전기력의 세기에 따라 진동할 수 있다고 한다.
2008.05.29
조회수 19101
-
 장성주 교수 휴머노이드형 플라워봇 개발
장성주 교수 휴머노이드형 플라워봇 개발
KAIST 건설 및 환경 공학과의 장성주 교수가 개발한 세계 최초의 휴머노이드형 플라워봇 ‘로히니’가 파주 신도시 유비파크(http://www.ubi-park.co.kr/index_0.asp) 체험관에 설치되어 큰 관심을 불러 일으키고 있다. 로히니는 고개를 들거나 떨구는 동작, 꽃잎이 피고 지는 동작, 두 개의 가지를 이용해서 제스처를 구사하는 일이 가능하고 꽃잎과 줄기의 색깔을 바꾸어 감정을 표현할 수 있으며 RFID 태그를 통해 식별된 대화상대의 정보를 토대로 상황인지형 대화를 구사할 수 있다. 로히니는 유비쿼터스 홈 환경에서 지능형 디바이스들과 거주자를 연결하여 주거 내 상황의 모니터링과 제어를 매개하는 직관적이고 새로운 유형의 로봇형 이용자 인터페이스이다. 개발을 주도한 장성주 교수는 MIT 미디어랩에서 객원 연구원으로 근무하던 중 ‘지능형 건축 벽체(Smart Architectural Surface)’ 라는 다기능 첨단 디지털 벽체를 MIT와 공동 개발한 바 있고 현재 지능형 환경 디자인 연구실을 운영하면서 KAIST 미래도시 연구소(KIUSS) 유-스페이스 연구센터 디렉터를 겸하고 있다.
ROHINI를 개발한 건설 및 환경공학과 장성주 교수
파주 Ubi-Park 체험관 u-House에 전시된 ‘ROHINI’ 로봇
장성주 교수 휴머노이드형 플라워봇 개발
장성주 교수 휴머노이드형 플라워봇 개발
KAIST 건설 및 환경 공학과의 장성주 교수가 개발한 세계 최초의 휴머노이드형 플라워봇 ‘로히니’가 파주 신도시 유비파크(http://www.ubi-park.co.kr/index_0.asp) 체험관에 설치되어 큰 관심을 불러 일으키고 있다. 로히니는 고개를 들거나 떨구는 동작, 꽃잎이 피고 지는 동작, 두 개의 가지를 이용해서 제스처를 구사하는 일이 가능하고 꽃잎과 줄기의 색깔을 바꾸어 감정을 표현할 수 있으며 RFID 태그를 통해 식별된 대화상대의 정보를 토대로 상황인지형 대화를 구사할 수 있다. 로히니는 유비쿼터스 홈 환경에서 지능형 디바이스들과 거주자를 연결하여 주거 내 상황의 모니터링과 제어를 매개하는 직관적이고 새로운 유형의 로봇형 이용자 인터페이스이다. 개발을 주도한 장성주 교수는 MIT 미디어랩에서 객원 연구원으로 근무하던 중 ‘지능형 건축 벽체(Smart Architectural Surface)’ 라는 다기능 첨단 디지털 벽체를 MIT와 공동 개발한 바 있고 현재 지능형 환경 디자인 연구실을 운영하면서 KAIST 미래도시 연구소(KIUSS) 유-스페이스 연구센터 디렉터를 겸하고 있다.
ROHINI를 개발한 건설 및 환경공학과 장성주 교수
파주 Ubi-Park 체험관 u-House에 전시된 ‘ROHINI’ 로봇
2007.11.14
조회수 21348
-
 생명화공 정희태교수, 세계최초 액정 초미세 나노패턴소자 개발
- 15일자 네이처 머티리얼스誌 온라인판 게재- 나노-바이오 전자소자 산업분야에서 시장 선점 기대우리 학교 생명화학공학과 정희태(鄭喜台, 42) 교수 연구팀이 액정 디스플레이 (LCD)의 핵심소재로 잘 알려져 있는 액정물질을 이용, 나노기술의 핵심인 차세대 초미세 나노패턴소자를 세계최초로 개발했다. 관련 연구논문은 15일자 네이처 머티리얼스(Nature Materials)誌 온라인판에 게재된다. 나노패턴 제작은 차세대 초고밀도 반도체 메모리기술과 바이오칩 등 나노기술의 핵심분야다. 특히, 鄭 교수팀의 액정을 이용한 패턴구현은 기존의 패턴 방식에 비해 대면적을 구현할 수 있을 뿐만 아니라 바이오 특성을 가지는 나노물질도 액정 패턴 내에 배열할 수 있다는 것이 큰 장점이다.
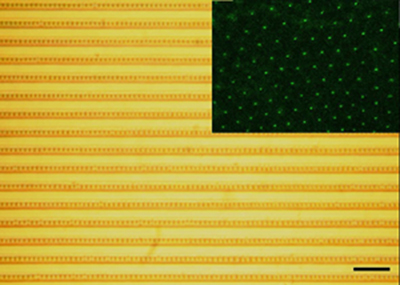
LCD를 구동하는 물질인 네마틱 액정과 달리 鄭 교수가 사용한 스메틱 액정은 LCD 응답특성이 매우 우수함에도 불구하고 자연적으로 존재하는 결함구조 때문에 LCD 구동물질로 사용하지 못하고 있다. 이러한 스메틱 액정은 기판의 표면특성에 따라서 무질서한 형태의 회오리 형 결함구조를 가진다. 이번 연구에서는 마이크로미터 수준의 직선이 새겨진 표면 처리된 실리콘 기판을 사용함으로써 무질서한 회오리 형태의 액정 결함구조를 규칙적으로 제어하였다(첨부 자료그림 참조). 특히 이 공정은 기존의 나노패턴에 적용하는 방식과 비교하여 제작시간을 수십 배 이상 줄일 수 있으며, 결함구조 내에 다른 형태의 기능성 물질도 규칙적으로 배열 할 수 있음을 확인하였다. 이는 다양한 형태의 패턴이 필요한 실제 반도체와 단백질 칩 등의 바이오 소자에 적용할 수 있는 가능성을 제시하고 있다 (자료그림 중 삽입사진 참조).
이번 연구결과로 LCD의 세계적 강국인 우리나라가 액정을 이용한 나노분야에서도 세계 최고의 원천기술을 갖게 되었다. 향후 액정을 이용한 새로운 응용의 신기원을 열게 되었으며, 나노-바이오 전자소자 산업분야에서 시장 선점 및 막대한 부가가치 창출 등을 통해 국가경쟁력 강화에 크게 기여할 것으로 기대된다. 연성재료(Soft Materials)를 이용하여 나노패턴을 제조하는 기술은 전 세계적으로 나노-바이오 분야에서 큰 이슈가 되는 연구로써, 연구의 핵심은 바이오 및 광전자소자 응용을 위하여 대면적에서 결함이 없는 소재의 개발에 있다. 이번 鄭 교수팀이 적용한 액정은 결함구조를 가지는 대표적인 물질로서 지금까지 학계에서는 대면적 나노패턴이 불가능하다고 인식돼 왔다.
鄭 교수는 “이번 연구결과는 연성소재를 이용한 나노패턴소자 제작방식의 기존 개념을 완전히 뒤엎는 것이다. 결함을 없애야만 한다는 기존의 생각에서 탈피하여 결함을 규칙적으로 구현하면 패턴에 이용할 수 있다는 발상의 전환으로 대면적 나노패턴을 개발했다는데 의미가 있으며, 향후 나노분야 전반에 걸쳐 영향이 클 것” 이라고 밝혔다.
이번 연구결과는 鄭 교수(교신저자)의 주도 하에 KAIST 물리학과 김만원 교수팀과 미국 캔트 주립대학의 액정센터 올래그 라브랜토비치(Oleg Lavrentovich)교수가 함께 일궈낸 성과다. 鄭 교수는 나노물질분야에서 사이언스, PNAS, Advanced Materials에 최정상급 논문을 다수 발표하는 등 나노물질 분야에서 차세대 주자로서 두각을 나타내고 있는 젊은 과학자다.
<해설>
액정: 유동성이 있으면서 고체적인 특성을 나타낸다. 전기적 특성이 매우 뛰어나 LCD 구동을 위한 핵심 물질로 사용된다. 네마틱, 스메틱, 콜레스테릭 등 다양한 종류의 액정이 존재한다. 현재 LCD에 사용하는 액정은 네마틱 액정이며 콜레스테릭 액정은 반사거울과 초정밀 온도계에 사용된다. 鄭 교수팀이 사용한 액정은 스메틱 액정으로서 네마틱 액정보다 자연계와 합성물질에서 더욱 많이 존재하고, 산업체와 학계에서 오랜기간 동안 연구해 왔음에도 불구하고 결함구조 등의 문제점으로 인하여 산업에 적용하지 못하고 있는 물질이다.
<첨부. 수 밀리미터 크기의 대면적 액정물질 나노패턴 현미경 사진>우측상단 삽입사진은 액정나노패턴내에 형광나노입자를 규칙적으로 포집한 리소그라피 제작사진
생명화공 정희태교수, 세계최초 액정 초미세 나노패턴소자 개발
- 15일자 네이처 머티리얼스誌 온라인판 게재- 나노-바이오 전자소자 산업분야에서 시장 선점 기대우리 학교 생명화학공학과 정희태(鄭喜台, 42) 교수 연구팀이 액정 디스플레이 (LCD)의 핵심소재로 잘 알려져 있는 액정물질을 이용, 나노기술의 핵심인 차세대 초미세 나노패턴소자를 세계최초로 개발했다. 관련 연구논문은 15일자 네이처 머티리얼스(Nature Materials)誌 온라인판에 게재된다. 나노패턴 제작은 차세대 초고밀도 반도체 메모리기술과 바이오칩 등 나노기술의 핵심분야다. 특히, 鄭 교수팀의 액정을 이용한 패턴구현은 기존의 패턴 방식에 비해 대면적을 구현할 수 있을 뿐만 아니라 바이오 특성을 가지는 나노물질도 액정 패턴 내에 배열할 수 있다는 것이 큰 장점이다.
LCD를 구동하는 물질인 네마틱 액정과 달리 鄭 교수가 사용한 스메틱 액정은 LCD 응답특성이 매우 우수함에도 불구하고 자연적으로 존재하는 결함구조 때문에 LCD 구동물질로 사용하지 못하고 있다. 이러한 스메틱 액정은 기판의 표면특성에 따라서 무질서한 형태의 회오리 형 결함구조를 가진다. 이번 연구에서는 마이크로미터 수준의 직선이 새겨진 표면 처리된 실리콘 기판을 사용함으로써 무질서한 회오리 형태의 액정 결함구조를 규칙적으로 제어하였다(첨부 자료그림 참조). 특히 이 공정은 기존의 나노패턴에 적용하는 방식과 비교하여 제작시간을 수십 배 이상 줄일 수 있으며, 결함구조 내에 다른 형태의 기능성 물질도 규칙적으로 배열 할 수 있음을 확인하였다. 이는 다양한 형태의 패턴이 필요한 실제 반도체와 단백질 칩 등의 바이오 소자에 적용할 수 있는 가능성을 제시하고 있다 (자료그림 중 삽입사진 참조).
이번 연구결과로 LCD의 세계적 강국인 우리나라가 액정을 이용한 나노분야에서도 세계 최고의 원천기술을 갖게 되었다. 향후 액정을 이용한 새로운 응용의 신기원을 열게 되었으며, 나노-바이오 전자소자 산업분야에서 시장 선점 및 막대한 부가가치 창출 등을 통해 국가경쟁력 강화에 크게 기여할 것으로 기대된다. 연성재료(Soft Materials)를 이용하여 나노패턴을 제조하는 기술은 전 세계적으로 나노-바이오 분야에서 큰 이슈가 되는 연구로써, 연구의 핵심은 바이오 및 광전자소자 응용을 위하여 대면적에서 결함이 없는 소재의 개발에 있다. 이번 鄭 교수팀이 적용한 액정은 결함구조를 가지는 대표적인 물질로서 지금까지 학계에서는 대면적 나노패턴이 불가능하다고 인식돼 왔다.
鄭 교수는 “이번 연구결과는 연성소재를 이용한 나노패턴소자 제작방식의 기존 개념을 완전히 뒤엎는 것이다. 결함을 없애야만 한다는 기존의 생각에서 탈피하여 결함을 규칙적으로 구현하면 패턴에 이용할 수 있다는 발상의 전환으로 대면적 나노패턴을 개발했다는데 의미가 있으며, 향후 나노분야 전반에 걸쳐 영향이 클 것” 이라고 밝혔다.
이번 연구결과는 鄭 교수(교신저자)의 주도 하에 KAIST 물리학과 김만원 교수팀과 미국 캔트 주립대학의 액정센터 올래그 라브랜토비치(Oleg Lavrentovich)교수가 함께 일궈낸 성과다. 鄭 교수는 나노물질분야에서 사이언스, PNAS, Advanced Materials에 최정상급 논문을 다수 발표하는 등 나노물질 분야에서 차세대 주자로서 두각을 나타내고 있는 젊은 과학자다.
<해설>
액정: 유동성이 있으면서 고체적인 특성을 나타낸다. 전기적 특성이 매우 뛰어나 LCD 구동을 위한 핵심 물질로 사용된다. 네마틱, 스메틱, 콜레스테릭 등 다양한 종류의 액정이 존재한다. 현재 LCD에 사용하는 액정은 네마틱 액정이며 콜레스테릭 액정은 반사거울과 초정밀 온도계에 사용된다. 鄭 교수팀이 사용한 액정은 스메틱 액정으로서 네마틱 액정보다 자연계와 합성물질에서 더욱 많이 존재하고, 산업체와 학계에서 오랜기간 동안 연구해 왔음에도 불구하고 결함구조 등의 문제점으로 인하여 산업에 적용하지 못하고 있는 물질이다.
<첨부. 수 밀리미터 크기의 대면적 액정물질 나노패턴 현미경 사진>우측상단 삽입사진은 액정나노패턴내에 형광나노입자를 규칙적으로 포집한 리소그라피 제작사진
2007.10.15
조회수 27252
-
 항공우주공학과 권세진, 심현철교수, 연료전지 무인기개발
- 액상 수소화물에서 수소추출, 연료전지스택에 공급하는 시스템 개발- 액체연료로는 세계최초, 무인기의 임무한계 획기적 연장 가능성 열어
우리 학교 항공우주공학과 권세진(權世震, 48, 사진왼쪽) 교수, 심현철(沈鉉哲, 38, 사진오른쪽) 교수 연구팀이 연료전지로 구동하는 소형 무인기를 개발했으며, 장시간 시험비행에 성공했다.
이번 연구개발 결과는 기존의 소형 무인기 동력원으로 사용되던 2차 전지를 대체할 수 있는 새로운 동력장치인 연료전지를 이용, 무인기의 임무 한계를 획기적으로 확장할 수 있는 가능성을 열었다는 데 큰 의의가 있다. 감시정찰을 목적으로 하는 소형 무인기는 미국 등 기술 선진국에서 실용화 되었으나, 동력원인 배터리의 에너지 밀도가 낮아 제한적인 임무수행만이 가능했다. 權 교수 연구팀이 개발한 무인기의 연료전지 동력장치는 소음이 없고 효율이 높으며, 액상 수소화물로부터 수소를 추출하기 때문에 기존의 배터리에 비해 에너지 밀도를 10배 이상 향상시켰다. 이번에 개발된 연료전지는 무인기 뿐 아니라 로봇의 전원으로도 사용이 기대된다.
▣ 개발배경연료전지는 차세대 동력원으로 세계 각국에서 개발경쟁이 치열하다. 국내에서도 몇몇 전자 및 화학 업체에서 노트북 컴퓨터용 연료전지를 개발하여 시연한 바가 있고, 자동차 회사에서는 엔진을 대체하기 위한 연료전지를 연구 중에 있다. 그러나 연료전지의 우수성이 잘 나타날 수 있으며 연료전지가 아니면 구현 자체가 어려운 장치는 무인기나 로봇 등과 같은 소형 모바일 시스템이다. 미국의 해군연구소와 조지아공대(Georgia Tech)의 연구팀이 연료전지 무인기를 연구해 왔으나, 이들은 고압의 수소가스를 저장하여 사용하므로, 에너지 밀도를 높이는 데에는 실패했다. 또한 연료 재보급을 위한 시설 등 운용상의 문제점도 가지고 있다. KAIST의 權 교수 연구팀은 액상 수소화물에서 수소를 추출하여 연료전지 스택에 공급하는 시스템을 개발했으며, 이를 시험용 무인기에 탑재하여 장시간 안정적으로 시험비행 하는데 성공했다.
▣ 핵심기술의 내용權 교수팀에서 사용한 연료인 수소화붕소나트륨(NaBH4)은 불연성이고 안정한 친환경 물질로써, 취급이 용이하고 수소 함량이 높다. 이 물질로부터 추출된 수소는 순도가 높기 때문에 연료전지 시스템 적용이 수월하다. <그림 1>은 프로펠러를 포함하는 전체 시스템의 구성도이다. 수화물을 가수분해하는 촉매 반응기, 전기를 발생하는 연료전지 스택, 동력을 충전 및 공급하는 동력제어장치, 프로펠러를 구동하는 전기모터로 이루어져 있다. 촉매 반응기에서 가수분해 과정을 통해 발생한 수소는 연료전지 스택에서 전기를 발생한다. 전기에너지는 동력제어장치에 충전되었다가 출력 요구 시 전동모터를 구동한다. <그림 2>는 동력발생 장치를 무인기에 탑재한 모습이다. 이번에 개발된 연료전지 무인기는 무게 2kg(연료전지시스템 750g 포함)으로써 500g의 연료를 싣고 10시간 이상 비행할 수 있다. 이는 배터리 동력원을 갖는 기존 무인기 항속시간의 10배에 달한다.
<그림 1> 동력계통의 구성
<그림 2> 동력 장치가 탑재된 무인기
<그림3> 무인기가 비행하는 광경
항공우주공학과 권세진, 심현철교수, 연료전지 무인기개발
- 액상 수소화물에서 수소추출, 연료전지스택에 공급하는 시스템 개발- 액체연료로는 세계최초, 무인기의 임무한계 획기적 연장 가능성 열어
우리 학교 항공우주공학과 권세진(權世震, 48, 사진왼쪽) 교수, 심현철(沈鉉哲, 38, 사진오른쪽) 교수 연구팀이 연료전지로 구동하는 소형 무인기를 개발했으며, 장시간 시험비행에 성공했다.
이번 연구개발 결과는 기존의 소형 무인기 동력원으로 사용되던 2차 전지를 대체할 수 있는 새로운 동력장치인 연료전지를 이용, 무인기의 임무 한계를 획기적으로 확장할 수 있는 가능성을 열었다는 데 큰 의의가 있다. 감시정찰을 목적으로 하는 소형 무인기는 미국 등 기술 선진국에서 실용화 되었으나, 동력원인 배터리의 에너지 밀도가 낮아 제한적인 임무수행만이 가능했다. 權 교수 연구팀이 개발한 무인기의 연료전지 동력장치는 소음이 없고 효율이 높으며, 액상 수소화물로부터 수소를 추출하기 때문에 기존의 배터리에 비해 에너지 밀도를 10배 이상 향상시켰다. 이번에 개발된 연료전지는 무인기 뿐 아니라 로봇의 전원으로도 사용이 기대된다.
▣ 개발배경연료전지는 차세대 동력원으로 세계 각국에서 개발경쟁이 치열하다. 국내에서도 몇몇 전자 및 화학 업체에서 노트북 컴퓨터용 연료전지를 개발하여 시연한 바가 있고, 자동차 회사에서는 엔진을 대체하기 위한 연료전지를 연구 중에 있다. 그러나 연료전지의 우수성이 잘 나타날 수 있으며 연료전지가 아니면 구현 자체가 어려운 장치는 무인기나 로봇 등과 같은 소형 모바일 시스템이다. 미국의 해군연구소와 조지아공대(Georgia Tech)의 연구팀이 연료전지 무인기를 연구해 왔으나, 이들은 고압의 수소가스를 저장하여 사용하므로, 에너지 밀도를 높이는 데에는 실패했다. 또한 연료 재보급을 위한 시설 등 운용상의 문제점도 가지고 있다. KAIST의 權 교수 연구팀은 액상 수소화물에서 수소를 추출하여 연료전지 스택에 공급하는 시스템을 개발했으며, 이를 시험용 무인기에 탑재하여 장시간 안정적으로 시험비행 하는데 성공했다.
▣ 핵심기술의 내용權 교수팀에서 사용한 연료인 수소화붕소나트륨(NaBH4)은 불연성이고 안정한 친환경 물질로써, 취급이 용이하고 수소 함량이 높다. 이 물질로부터 추출된 수소는 순도가 높기 때문에 연료전지 시스템 적용이 수월하다. <그림 1>은 프로펠러를 포함하는 전체 시스템의 구성도이다. 수화물을 가수분해하는 촉매 반응기, 전기를 발생하는 연료전지 스택, 동력을 충전 및 공급하는 동력제어장치, 프로펠러를 구동하는 전기모터로 이루어져 있다. 촉매 반응기에서 가수분해 과정을 통해 발생한 수소는 연료전지 스택에서 전기를 발생한다. 전기에너지는 동력제어장치에 충전되었다가 출력 요구 시 전동모터를 구동한다. <그림 2>는 동력발생 장치를 무인기에 탑재한 모습이다. 이번에 개발된 연료전지 무인기는 무게 2kg(연료전지시스템 750g 포함)으로써 500g의 연료를 싣고 10시간 이상 비행할 수 있다. 이는 배터리 동력원을 갖는 기존 무인기 항속시간의 10배에 달한다.
<그림 1> 동력계통의 구성
<그림 2> 동력 장치가 탑재된 무인기
<그림3> 무인기가 비행하는 광경
2007.10.12
조회수 23582
-
 김종환교수, 유전자·염색체 갖는 로봇, 세계 최초 개발
KAIST 김종환(전자전산학과)교수가 유전자와 염색체를 갖는 인공생명체로서의 로봇을 세계 최초로 개발했다. KAIST ITRC-지능로봇연구센터 소장인 김종환 교수는 지난해 5월 개발해 공개했던 유비쿼터스 로봇(유비봇)인 `리티"(Rity)에 14개의 인공 염색체를 각각 부여한 결과, 제 각각의 ` 성격"(personality)을 갖는 것을 확인했다고 최근 밝혔다.
로봇 염색체란 생각하고 느끼고 추론하고 욕구와 의지를 표현할 수 있는 로봇을 만들기 위해 컴퓨터로 처리된 일련의 지시체계(소프트웨어 프로그램)다. 각각의 염색체를 부여 받은 리티들은 같은 환경에서 어떤 자극을 주었을 때 어떤 것은 지루해했지만 다른 것들은 주인을 알아보고 펄떡거리면서 `기쁨"을 표현하는 다른 반응을 보였다.
왜냐하면 그들은 각기 다른 개성을 가지고 있고 그 개성은 전적으로 자신의 유전자에 좌우되기 때문이다. 리티는 김교수가 CCD 디지털카메라를 통해 실제 물리적 공간에 있는 인간과 상호 작용이 가능하도록 만든 강아지 모양의 3D 가상(컴퓨터 가상세계 안에서 살고 있는)소봇(Sobot). 소봇이란 네트워크를 통해 이동하며 언제 어디서든지 접속할 수 있고 자율적인 상황 인식과 사용자와 끊임없는 상호 작용이 가능한 소프트웨어로만 구성된 로봇을 말한다.
리티의 가상 환경은 3가지 물체와 주인 1명의 얼굴, 빛과 소리, 온도 센서, 접촉 센서, 시각 센서, 자이로 센서, 내부 타이머를 가지고 있고 이를 바탕으로 47가지의 자극 정보를 인식할 수 있다. 특히 행동 기반 및 학습 능력을 갖춘 인공 생명체로서 77가지 행동을 나타낼 수 있다.
김 교수는 지난해 12월 뉴질랜드에서 열린 `제2회 자율 로봇 및 에이전트에 관한 국제학회"(ICARA)의 기조강연(Keynote Speech)에서 이 같이 로봇의 `성격" 을 결정하는 14개의 인공 염색체에 대해 발표했고 현지 언론이 이를 크게 보도했다고 센터측은 밝혔다.
또 캐나다 9개 유력 일간지들도 지난 19일자로 1면 등 주요 면에 이 소식을 일제히 실었다. 센터측은 이 신문들이 `인공생명체 유전자 코드 발명- 인간처럼 말하고 느낄 수 있는 로봇이 곧 나타날 것", `인공생명체의 기원, 한국의 발명가, 생각하고 느끼고 복제까지 할 수 있는 유전자를 가진 로봇창조 가능성 제기"와 같은 제목으로 크게 보도했다고 소개했다.
KAIST ITRC-지능로봇연구센터 관계자는 "김교수의 이런 연구는 그동안 많은 로봇 연구자들이 로봇의 지능을 높이고 어떻게 인간처럼 움직일 수 있게 하는데만 주력해온 것과 달리 찰스 다윈의 `종의 기원"과 같이 인공생명체로서의 로봇 종의 기원(시작)에 관한 것이어서 국내외 학계에 신선한 충격을 주고 있다"고 말했다.
그는 이어 "현재 리티는 단지 14개의 염색체를 약 2천 바이트의 데이터로 가지고 있지만 미래의 종들에게는 복잡한 유전적 특성과 더 많은 염색체가 부여될 수 있을 것"이라고 덧붙였다.
김종환교수, 유전자·염색체 갖는 로봇, 세계 최초 개발
KAIST 김종환(전자전산학과)교수가 유전자와 염색체를 갖는 인공생명체로서의 로봇을 세계 최초로 개발했다. KAIST ITRC-지능로봇연구센터 소장인 김종환 교수는 지난해 5월 개발해 공개했던 유비쿼터스 로봇(유비봇)인 `리티"(Rity)에 14개의 인공 염색체를 각각 부여한 결과, 제 각각의 ` 성격"(personality)을 갖는 것을 확인했다고 최근 밝혔다.
로봇 염색체란 생각하고 느끼고 추론하고 욕구와 의지를 표현할 수 있는 로봇을 만들기 위해 컴퓨터로 처리된 일련의 지시체계(소프트웨어 프로그램)다. 각각의 염색체를 부여 받은 리티들은 같은 환경에서 어떤 자극을 주었을 때 어떤 것은 지루해했지만 다른 것들은 주인을 알아보고 펄떡거리면서 `기쁨"을 표현하는 다른 반응을 보였다.
왜냐하면 그들은 각기 다른 개성을 가지고 있고 그 개성은 전적으로 자신의 유전자에 좌우되기 때문이다. 리티는 김교수가 CCD 디지털카메라를 통해 실제 물리적 공간에 있는 인간과 상호 작용이 가능하도록 만든 강아지 모양의 3D 가상(컴퓨터 가상세계 안에서 살고 있는)소봇(Sobot). 소봇이란 네트워크를 통해 이동하며 언제 어디서든지 접속할 수 있고 자율적인 상황 인식과 사용자와 끊임없는 상호 작용이 가능한 소프트웨어로만 구성된 로봇을 말한다.
리티의 가상 환경은 3가지 물체와 주인 1명의 얼굴, 빛과 소리, 온도 센서, 접촉 센서, 시각 센서, 자이로 센서, 내부 타이머를 가지고 있고 이를 바탕으로 47가지의 자극 정보를 인식할 수 있다. 특히 행동 기반 및 학습 능력을 갖춘 인공 생명체로서 77가지 행동을 나타낼 수 있다.
김 교수는 지난해 12월 뉴질랜드에서 열린 `제2회 자율 로봇 및 에이전트에 관한 국제학회"(ICARA)의 기조강연(Keynote Speech)에서 이 같이 로봇의 `성격" 을 결정하는 14개의 인공 염색체에 대해 발표했고 현지 언론이 이를 크게 보도했다고 센터측은 밝혔다.
또 캐나다 9개 유력 일간지들도 지난 19일자로 1면 등 주요 면에 이 소식을 일제히 실었다. 센터측은 이 신문들이 `인공생명체 유전자 코드 발명- 인간처럼 말하고 느낄 수 있는 로봇이 곧 나타날 것", `인공생명체의 기원, 한국의 발명가, 생각하고 느끼고 복제까지 할 수 있는 유전자를 가진 로봇창조 가능성 제기"와 같은 제목으로 크게 보도했다고 소개했다.
KAIST ITRC-지능로봇연구센터 관계자는 "김교수의 이런 연구는 그동안 많은 로봇 연구자들이 로봇의 지능을 높이고 어떻게 인간처럼 움직일 수 있게 하는데만 주력해온 것과 달리 찰스 다윈의 `종의 기원"과 같이 인공생명체로서의 로봇 종의 기원(시작)에 관한 것이어서 국내외 학계에 신선한 충격을 주고 있다"고 말했다.
그는 이어 "현재 리티는 단지 14개의 염색체를 약 2천 바이트의 데이터로 가지고 있지만 미래의 종들에게는 복잡한 유전적 특성과 더 많은 염색체가 부여될 수 있을 것"이라고 덧붙였다.
2005.01.31
조회수 24125
-
한국형 휴머노이드 로봇 휴보(HUBO) 개발
기계공학과 오준호(吳俊鎬, 50) 교수팀은 지난 3년여의 연구기간에 걸쳐 국내 최초로 이족보행이 가능한 완전한 외양을 갖춘 2족 보행 로봇을 개발하고 그 사진을 공개했다.
연구책임자: 오준호 교수
연구진 : 김정엽(박사과정 4년), 박일우(박사과정 3년), 이정호(박사과정 3년), 김민수(박사과정 1년), 조백규(박사과정 1년)
새로이 선보인 휴머노이드로봇 휴보는 2003년도에 개발된 KHR-2의 성능을 업그레이드 한 모델로 몸 전체의 기계적 강성을 증가 시켜 보다 안정된 보행을 가능하게 하였고 상체 관절의 구동방식을 개선하여 더욱 부드러운 동작이 가능하게 하였다.
HUBO는 현재 0~32cm보폭으로 최대 시속 1.25km/h 전진보행한다. 좌/우 옆걸음, 뒤걸음, 좌/우 회전 걸음, 다양한 몸동작, 독립적인 5개의 손가락 운동, 독립적인 양 안구 운동, 손목의 힘/모멘트 센서를 통한 외력감지 등이 가능하며 이를 통하여 자유걸음새, 외력에 따라 움직이는 팔동작, 외부 안내에 따라 자유롭게 걷는 걸음, 비젼을 통한 실시간 목표 추적, 음성 인식 및 합성을 통한 대화 등을 수행한다. 아직 달리기(주행)과 층계오르기 등의 걸음새는 구현 되지 않았으나 추후 연구를 실시할 예정이다.
KHR 시리즈를 구현함에 있어 가능한 많은 구동자유도, 가능한 긴 작동시간, 콤팩트하고 미려한 외관(예: 백팩의 제거), 저렴한 개발비 및 최소의 유지비, 최단의 개발기간을 목표로 하였다.
이를 위하여 구동감속부, 힘/모멘트 센서, 관성센서, 서보 드라이버, 분산제어기, 실시간 제어 아키텍쳐 등 요소 기술을 자체 설계하여 구현함으로써 설계를 최적화 하도록 하였다. 또한 간결한 구조물설계를 통하여 기계적 강성을 얻었으며 기구학적 불확실성을 최소화 하였다.
연구개발과정을 표로 보면 아래와 같다.
기간
지원기관
예산
KHR-1
2002.1 - 2002.12
BK21, HWRS ERC
0.8억
KHR-2
2003.1 - 2003. 12
BK21, 기관고유사업
1.7억
KHR-3(HUBO)
2004.1 - 2004. 12
BK21, 산업자원부
5.5억
특징
KHR-1
21축, 중앙집중제어 방식,
머리와 손 부분이 없는 보행 기능위주의 구조 키 130cm, 무게:45Kg
KHR-2
41축, 분산제어방식(CAN 통신)
실시간 window xp - RTX
power 300w, 키:125cm, 무게 55kg, 비젼 기능
부분적 커버를 갖는 외양
보행속도: 25cm, 65회/분 = 0.95km/h 연속작동시간: 45분/1회충전
KHR-3(HUBO)
KHR-2의 업그레이드된 기구 및 기능
- 음성합성 및 인식기능
- 몸체의 기계적 강성 증가
- 상체 관절의 구동 메카니즘 개선
- 완벽한 enclosure 형 와관 구현
- 32cm 보행+ 65회/분 = 1.25Km/h - 연속작동: 90분 /1회충전
향후계획:
- 층계오르기 구현, - 보행속도 향상, - 달리기 구현
- 자유걸음새 구현, - 인간과 상호작용능력 개선 - 다양한 대중 performance 시연
한편, 휴보 개발의 기대 효과를 살펴보면,
- 환상을 현실에서 구현할 수 있다는 비젼을 제시,
- 국내의 기술력으로 휴머노이드 로봇을 개발함으로써 기술력을 대 내외에 과시하여 국민적 자긍심을 고취,
- 관련 첨단기술(구동기, 감속기, 2차전지, 각종센서, 제어기, 시스템기술)의 국산화를 통한 기술 spin off 효과 - 관련기술 최 선진국인 일본과 가시적인 경쟁을 통한 국가 기술위상확립 등을 들 수 있다.
2004.12.27
조회수 27416