-
 생각만으로 정확하게 로봇팔 조종이 가능한 뇌-기계 인터페이스 개발
우리 대학 바이오및뇌공학과 정재승 교수 연구팀이 3차원 공간상에서 생각만으로 로봇팔을 높은 정확도 (90.9~92.6%)로 조종하는 `뇌-기계 인터페이스 시스템'을 개발했다고 23일 밝혔다.
정 교수 연구팀은 인공지능과 유전자 알고리즘을 사용해 인간의 대뇌 심부에서 측정한 뇌파만으로 팔 움직임의 의도를 파악해 로봇팔을 제어하는 새로운 형태의 뇌-기계 인터페이스 시스템을 개발했다. 뇌 활동만으로 사람의 의도를 파악해 로봇이나 기계가 대신 행동에 옮기는 `뇌-기계 인터페이스' 기술은 최근 급속도로 발전하고 있다. 하지만 손을 움직이는 정도의 의도 파악을 넘어, 팔 움직임의 방향에 대한 의도를 섬세하게 파악해 정교하게 로봇팔을 움직이는 기술은 아직 정확도가 높지 않았다.
하지만 연구팀은 이번 연구에서 조종 `방향'에 대한 의도를 뇌 활동만으로 인식하는 인공지능 모델을 개발했고, 그 결과 3차원 공간상에서 24개의 방향을 90% 이상의 정확도로 정교하게 해석하는 시스템을 개발했다.
게다가 딥러닝 등 기존 기계학습 기술은 높은 사양의 GPU 하드웨어가 필요했지만, 이번 연구에서는 축적 컴퓨팅(Reservoir Computing) 기법을 이용해 낮은 사양의 하드웨어에서도 인공지능 학습이 가능하여 스마트 모바일 기기에서도 폭넓게 응용될 수 있도록 개발해, 향후 메타버스와 스마트 기기에도 폭넓게 적용이 가능할 것으로 기대된다.
우리 대학 김훈희 박사(現 강남대 조교수)가 제1 저자로 참여한 이번 연구는 국제학술지 `어플라이드 소프트 컴퓨팅(Applied Soft Computing)' 2022년 117권 3월호에 출판됐다. (논문명 : An electrocorticographic decoder for arm movement for brain-machine interface using an echo state network and Gaussian readout).
뇌-기계 인터페이스는 사용자의 뇌 활동을 통해 의도를 읽고 로봇이나 기계에 전달하는 기술로서 로봇, 드론, 컴퓨터뿐만 아니라 스마트 모바일 기기, 메타버스 등에서의 이용될 차세대 인터페이스 기술로 각광받고 있다.
특히 기존의 인터페이스가 외부 신체 기관을 통해 명령을 간접 전달(버튼, 터치, 제스처 등)해야 하지만 뇌-기계 인터페이스는 명령을 뇌로부터 직접적 전달한다는 점에서 가장 진보된 인터페이스 기술로 여겨진다.
그러나 뇌파는 개개인의 차이가 매우 크고, 단일 신경 세포로부터 정확한 신호를 읽는 것이 아니라 넓은 영역에 있는 신경 세포 집단의 전기적 신호 특성을 해석해야 하므로 잡음이 크다는 한계점을 가지고 있다.
연구팀은 이러한 문제 해결을 위해 최첨단 인공지능 기법의 하나인 `축적 컴퓨팅 기법'을 이용해 뇌-기계 인터페이스에서 필요한 개개인의 뇌파 신호의 중요 특성을 인공신경망이 자동으로 학습해 찾을 수 있도록 구현했다.
또한 유전자 알고리즘(Genetic Algorithm)을 이용해 인공지능 신경망이 최적의 뇌파 특성을 효율적으로 찾을 수 있게 시스템을 설계했다. 연구팀은 심부 뇌파를 최종 해석하는 리드아웃(Readout)을 가우시안(Gaussian) 모델로 설계해 시각피질 신경 세포가 방향을 표현하는 방법을 모방하는 인공신경망을 개발했다. 이런 리드아웃 방식은 축적 컴퓨팅의 선형 학습 알고리즘을 이용해 일반적 사양의 간단한 하드웨어에서도 빠르게 학습할 수 있어 메타버스, 스마트기기 등 일상생활에서 응용이 가능해진다.
특히, 이번 연구에서 만들어진 뇌-기계 인터페이스 인공지능 모델은 3차원상에서 24가지 방향 즉, 각 차원에서 8가지 방향을 디코딩할 수 있으며 모든 방향에서 평균 90% 이상의 정확도 (90.9%~92.6% 범위)를 보였다. 또한 연구된 뇌-기계 인터페이스는 3차원 공간상에서 로봇팔을 움직이는 상상을 할 때의 뇌파를 해석해 성공적으로 로봇팔을 움직이는 시뮬레이션 결과를 보였다.
인공지능 시스템을 만든 제1 저자인 김훈희 박사는 "공학적인 신호처리 기법에 의존해 온 기존 뇌파 디코딩 방법과는 달리, 인간 뇌의 실제 작동 구조를 모방한 인공신경망을 개발해 좀더 발전된 형태의 뇌-기계 인터페이스 시스템을 개발해 기쁘다ˮ면서 "향후 뇌의 특성을 좀 더 구체적으로 이용한 `뇌 모방 인공지능(Brain-inspired A.I.)'을 이용한 다양한 뇌-기계 인터페이스를 개발할 계획이다ˮ라고 말했다.
이번 연구를 주도한 연구책임자 정재승 교수는 "뇌파를 통해 생각만으로 로봇팔을 구동하는 `뇌-기계 인터페이스 시스템'들이 대부분 고사양 하드웨어가 필요해 실시간 응용으로 나아가기 어렵고 스마트기기 등으로 적용이 어려웠다. 그러나 이번 시스템은 90%~92%의 높은 정확도를 가진 의도 인식 인공지능 시스템을 만들어 메타버스 안에서 아바타를 생각대로 움직이게 하거나 앱을 생각만으로 컨트롤하는 스마트기기 등에 광범위하게 사용될 수 있다ˮ고 말했다.
이번 연구 결과는 사지마비 환자나 사고로 팔을 잃은 환자들을 위한 로봇팔 장착 및 제어 기술부터, 메타버스, 스마트기기, 게임, 엔터테인먼트 애플리케이션 등 다양한 시스템에 뇌-기계 인터페이스를 적용할 가능성을 열어 줄 것으로 기대된다.
이번 연구는 한국연구재단 뇌 원천기술개발사업의 지원을 받아 수행됐다.
생각만으로 정확하게 로봇팔 조종이 가능한 뇌-기계 인터페이스 개발
우리 대학 바이오및뇌공학과 정재승 교수 연구팀이 3차원 공간상에서 생각만으로 로봇팔을 높은 정확도 (90.9~92.6%)로 조종하는 `뇌-기계 인터페이스 시스템'을 개발했다고 23일 밝혔다.
정 교수 연구팀은 인공지능과 유전자 알고리즘을 사용해 인간의 대뇌 심부에서 측정한 뇌파만으로 팔 움직임의 의도를 파악해 로봇팔을 제어하는 새로운 형태의 뇌-기계 인터페이스 시스템을 개발했다. 뇌 활동만으로 사람의 의도를 파악해 로봇이나 기계가 대신 행동에 옮기는 `뇌-기계 인터페이스' 기술은 최근 급속도로 발전하고 있다. 하지만 손을 움직이는 정도의 의도 파악을 넘어, 팔 움직임의 방향에 대한 의도를 섬세하게 파악해 정교하게 로봇팔을 움직이는 기술은 아직 정확도가 높지 않았다.
하지만 연구팀은 이번 연구에서 조종 `방향'에 대한 의도를 뇌 활동만으로 인식하는 인공지능 모델을 개발했고, 그 결과 3차원 공간상에서 24개의 방향을 90% 이상의 정확도로 정교하게 해석하는 시스템을 개발했다.
게다가 딥러닝 등 기존 기계학습 기술은 높은 사양의 GPU 하드웨어가 필요했지만, 이번 연구에서는 축적 컴퓨팅(Reservoir Computing) 기법을 이용해 낮은 사양의 하드웨어에서도 인공지능 학습이 가능하여 스마트 모바일 기기에서도 폭넓게 응용될 수 있도록 개발해, 향후 메타버스와 스마트 기기에도 폭넓게 적용이 가능할 것으로 기대된다.
우리 대학 김훈희 박사(現 강남대 조교수)가 제1 저자로 참여한 이번 연구는 국제학술지 `어플라이드 소프트 컴퓨팅(Applied Soft Computing)' 2022년 117권 3월호에 출판됐다. (논문명 : An electrocorticographic decoder for arm movement for brain-machine interface using an echo state network and Gaussian readout).
뇌-기계 인터페이스는 사용자의 뇌 활동을 통해 의도를 읽고 로봇이나 기계에 전달하는 기술로서 로봇, 드론, 컴퓨터뿐만 아니라 스마트 모바일 기기, 메타버스 등에서의 이용될 차세대 인터페이스 기술로 각광받고 있다.
특히 기존의 인터페이스가 외부 신체 기관을 통해 명령을 간접 전달(버튼, 터치, 제스처 등)해야 하지만 뇌-기계 인터페이스는 명령을 뇌로부터 직접적 전달한다는 점에서 가장 진보된 인터페이스 기술로 여겨진다.
그러나 뇌파는 개개인의 차이가 매우 크고, 단일 신경 세포로부터 정확한 신호를 읽는 것이 아니라 넓은 영역에 있는 신경 세포 집단의 전기적 신호 특성을 해석해야 하므로 잡음이 크다는 한계점을 가지고 있다.
연구팀은 이러한 문제 해결을 위해 최첨단 인공지능 기법의 하나인 `축적 컴퓨팅 기법'을 이용해 뇌-기계 인터페이스에서 필요한 개개인의 뇌파 신호의 중요 특성을 인공신경망이 자동으로 학습해 찾을 수 있도록 구현했다.
또한 유전자 알고리즘(Genetic Algorithm)을 이용해 인공지능 신경망이 최적의 뇌파 특성을 효율적으로 찾을 수 있게 시스템을 설계했다. 연구팀은 심부 뇌파를 최종 해석하는 리드아웃(Readout)을 가우시안(Gaussian) 모델로 설계해 시각피질 신경 세포가 방향을 표현하는 방법을 모방하는 인공신경망을 개발했다. 이런 리드아웃 방식은 축적 컴퓨팅의 선형 학습 알고리즘을 이용해 일반적 사양의 간단한 하드웨어에서도 빠르게 학습할 수 있어 메타버스, 스마트기기 등 일상생활에서 응용이 가능해진다.
특히, 이번 연구에서 만들어진 뇌-기계 인터페이스 인공지능 모델은 3차원상에서 24가지 방향 즉, 각 차원에서 8가지 방향을 디코딩할 수 있으며 모든 방향에서 평균 90% 이상의 정확도 (90.9%~92.6% 범위)를 보였다. 또한 연구된 뇌-기계 인터페이스는 3차원 공간상에서 로봇팔을 움직이는 상상을 할 때의 뇌파를 해석해 성공적으로 로봇팔을 움직이는 시뮬레이션 결과를 보였다.
인공지능 시스템을 만든 제1 저자인 김훈희 박사는 "공학적인 신호처리 기법에 의존해 온 기존 뇌파 디코딩 방법과는 달리, 인간 뇌의 실제 작동 구조를 모방한 인공신경망을 개발해 좀더 발전된 형태의 뇌-기계 인터페이스 시스템을 개발해 기쁘다ˮ면서 "향후 뇌의 특성을 좀 더 구체적으로 이용한 `뇌 모방 인공지능(Brain-inspired A.I.)'을 이용한 다양한 뇌-기계 인터페이스를 개발할 계획이다ˮ라고 말했다.
이번 연구를 주도한 연구책임자 정재승 교수는 "뇌파를 통해 생각만으로 로봇팔을 구동하는 `뇌-기계 인터페이스 시스템'들이 대부분 고사양 하드웨어가 필요해 실시간 응용으로 나아가기 어렵고 스마트기기 등으로 적용이 어려웠다. 그러나 이번 시스템은 90%~92%의 높은 정확도를 가진 의도 인식 인공지능 시스템을 만들어 메타버스 안에서 아바타를 생각대로 움직이게 하거나 앱을 생각만으로 컨트롤하는 스마트기기 등에 광범위하게 사용될 수 있다ˮ고 말했다.
이번 연구 결과는 사지마비 환자나 사고로 팔을 잃은 환자들을 위한 로봇팔 장착 및 제어 기술부터, 메타버스, 스마트기기, 게임, 엔터테인먼트 애플리케이션 등 다양한 시스템에 뇌-기계 인터페이스를 적용할 가능성을 열어 줄 것으로 기대된다.
이번 연구는 한국연구재단 뇌 원천기술개발사업의 지원을 받아 수행됐다.
2022.02.24
조회수 16766
-
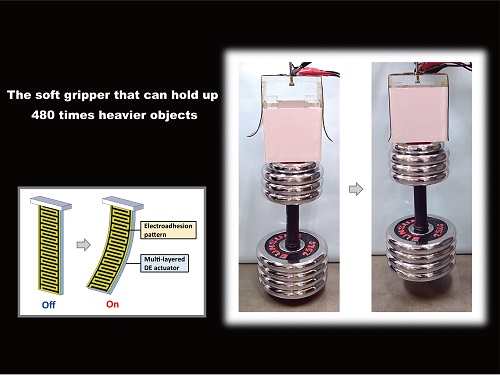 자체 무게의 480배 이상을 들어올릴 수 있는 소프트 그리퍼 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 자체 무게의 480배 이상의 중량을 들어올릴 수 있는 소프트 그리퍼를 개발했다.
연구팀에서 개발한 그리퍼는 인공근육과 전기접착식피부를 결합한 초경량 그리퍼로서, 가벼운 인공근육을 이용해 쥐고자 하는 물체에 접촉한 후 강력한 전기접착력을 발생시켜 무거운 물체를 들어올릴 수 있도록 한다. 제작된 소프트 그리퍼는 6.2g의 가벼운 무게를 가지지만 625g의 무게까지 쥐고 이송시킬 수 있으며, 대면적으로 제작된 35g의 그리퍼는 자체 무게의 480배 이상인 16.8kg까지 집어올릴 수 있다.
연구팀은 이번 연구에서 폴리머 기반의 액추에이터를 인공근육으로 사용했기 때문에 매우 가벼운 무게의 소프트 그리퍼를 구현할 수 있었다. 폴리머 기반의 액추에이터는 높은 유전율을 가지는 얇은 탄성체의 양면에 신축성이 있는 전극을 도포하여 제작됐다. 양면의 전극에 전압을 가해주면 전극 사이의 인력이 발생하여 탄성체를 두께 방향으로 누르게 되고, 결과적으로 면 방향의 팽창이 발생하는 원리를 사용했다. 연구팀은 이러한 작동원리를 소프트 그리퍼에 응용하기 위해 팽창 변형을 굽힘 변형으로 변환해주는 기계적 구조를 도입했다.
연구팀은 인공근육을 사용해 그리퍼를 초경량으로 제작함과 동시에, 무거운 물체를 들어올릴 수 있도록 전기접착식피부를 적용했다. 전기접착식피부의 내부에는 접착력을 발생시키기 위한 전극이 반복적으로 배치되어 있으며, 피부의 표면에는 전기적 절연층이 코팅돼있다. 전기접착식피부가 물체와 접촉한 후 반복적으로 배치된 전극에 전압이 가해지면, 접촉한 물체의 표면에 전기접착식피부의 전극과 반대된 전하가 유도된다. 결과적으로 전기접착식피부의 전극과 물체 표면에 유도된 전하 사이에 전기적 인력이 생성돼 그리퍼와 대상 물체 사이에 높은 접착력을 발생시킬 수 있다.
연구팀에서는 소프트 그리퍼의 성능을 극대화하기 위해 인공근육 및 전기접착식피부의 구조, 규격, 소재를 실험적으로 최적화했다. 그 결과 연구팀에서 개발한 소프트 그리퍼는 두 개의 손가락만을 이용하지만 원기둥, 구, 육면체, 평평한 물체, 포장재, 비정형 물체 등 다양한 형상의 물체를 집어올리고 이송할 수 있으면서도, 자체 무게의 480배에 달하는 무게까지 들어올릴 수 있다.
연구팀이 개발한 소프트 그리퍼는 손으로 쥐기 어려운 평평한 모양부터 다양한 입체 모양의 물체를 모두 집을 수 있다는 장점이 있기 때문에, 로봇핸드를 교체하지 않고도 다양한 모양의 물체를 다루는 작업을 연속적으로 수행할 수 있을 것으로 기대된다. 또한, 경량화된 소프트 그리퍼를 사용함으로써 로봇팔에 가해지는 부하를 줄일 수 있고, 그 결과 기존의 로봇 그리퍼를 사용한 경우보다 더 무거운 물체를 이송시키는 것을 가능하게 할 수 있다.
관련 연구를 주도적으로 수행한 박사과정 황건우 학생은 이번 연구를 Instruments 분야 Top (상위 1%) 학술지인 IEEE Trans. Industrial Electronics를 포함해Smart Materials and Structures 등에 총 2편의 논문을 게재했다. (논문명: Electroadhesion-Based High-Payload Soft Gripper With Mechanically Strengthened Structure / Improved electroadhesive force by using fumed alumina/PDMS composites)
이번 연구는 한국산업기술평가관리원의 산업핵심기술개발사업 및 로봇산업핵심기술개발사업(알키미스트 프로젝트)의 지원을 받아 수행됐다.
자체 무게의 480배 이상을 들어올릴 수 있는 소프트 그리퍼 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 자체 무게의 480배 이상의 중량을 들어올릴 수 있는 소프트 그리퍼를 개발했다.
연구팀에서 개발한 그리퍼는 인공근육과 전기접착식피부를 결합한 초경량 그리퍼로서, 가벼운 인공근육을 이용해 쥐고자 하는 물체에 접촉한 후 강력한 전기접착력을 발생시켜 무거운 물체를 들어올릴 수 있도록 한다. 제작된 소프트 그리퍼는 6.2g의 가벼운 무게를 가지지만 625g의 무게까지 쥐고 이송시킬 수 있으며, 대면적으로 제작된 35g의 그리퍼는 자체 무게의 480배 이상인 16.8kg까지 집어올릴 수 있다.
연구팀은 이번 연구에서 폴리머 기반의 액추에이터를 인공근육으로 사용했기 때문에 매우 가벼운 무게의 소프트 그리퍼를 구현할 수 있었다. 폴리머 기반의 액추에이터는 높은 유전율을 가지는 얇은 탄성체의 양면에 신축성이 있는 전극을 도포하여 제작됐다. 양면의 전극에 전압을 가해주면 전극 사이의 인력이 발생하여 탄성체를 두께 방향으로 누르게 되고, 결과적으로 면 방향의 팽창이 발생하는 원리를 사용했다. 연구팀은 이러한 작동원리를 소프트 그리퍼에 응용하기 위해 팽창 변형을 굽힘 변형으로 변환해주는 기계적 구조를 도입했다.
연구팀은 인공근육을 사용해 그리퍼를 초경량으로 제작함과 동시에, 무거운 물체를 들어올릴 수 있도록 전기접착식피부를 적용했다. 전기접착식피부의 내부에는 접착력을 발생시키기 위한 전극이 반복적으로 배치되어 있으며, 피부의 표면에는 전기적 절연층이 코팅돼있다. 전기접착식피부가 물체와 접촉한 후 반복적으로 배치된 전극에 전압이 가해지면, 접촉한 물체의 표면에 전기접착식피부의 전극과 반대된 전하가 유도된다. 결과적으로 전기접착식피부의 전극과 물체 표면에 유도된 전하 사이에 전기적 인력이 생성돼 그리퍼와 대상 물체 사이에 높은 접착력을 발생시킬 수 있다.
연구팀에서는 소프트 그리퍼의 성능을 극대화하기 위해 인공근육 및 전기접착식피부의 구조, 규격, 소재를 실험적으로 최적화했다. 그 결과 연구팀에서 개발한 소프트 그리퍼는 두 개의 손가락만을 이용하지만 원기둥, 구, 육면체, 평평한 물체, 포장재, 비정형 물체 등 다양한 형상의 물체를 집어올리고 이송할 수 있으면서도, 자체 무게의 480배에 달하는 무게까지 들어올릴 수 있다.
연구팀이 개발한 소프트 그리퍼는 손으로 쥐기 어려운 평평한 모양부터 다양한 입체 모양의 물체를 모두 집을 수 있다는 장점이 있기 때문에, 로봇핸드를 교체하지 않고도 다양한 모양의 물체를 다루는 작업을 연속적으로 수행할 수 있을 것으로 기대된다. 또한, 경량화된 소프트 그리퍼를 사용함으로써 로봇팔에 가해지는 부하를 줄일 수 있고, 그 결과 기존의 로봇 그리퍼를 사용한 경우보다 더 무거운 물체를 이송시키는 것을 가능하게 할 수 있다.
관련 연구를 주도적으로 수행한 박사과정 황건우 학생은 이번 연구를 Instruments 분야 Top (상위 1%) 학술지인 IEEE Trans. Industrial Electronics를 포함해Smart Materials and Structures 등에 총 2편의 논문을 게재했다. (논문명: Electroadhesion-Based High-Payload Soft Gripper With Mechanically Strengthened Structure / Improved electroadhesive force by using fumed alumina/PDMS composites)
이번 연구는 한국산업기술평가관리원의 산업핵심기술개발사업 및 로봇산업핵심기술개발사업(알키미스트 프로젝트)의 지원을 받아 수행됐다.
2021.03.09
조회수 95018
-
 액정화면 깨뜨리지 않고 부드럽게 터치하는 인공손가락 개발
우리 대학 연구진이 액정 같이 깨어지기 쉬운 화면을 부드럽게 터치해 다양한 작업을 할 수 있는 인공손가락을 선보였다.
기계공학과 오일권 교수 연구팀이 스마트폰이나 햅틱 반응형 디스플레이를 정교하게 터치할 수 있는 소프트 터치 액츄에이터 기술을 개발했다고 밝혔다.
연구팀은 부드럽고 얇은 박막형의 소프트 터치 *액츄에이터를 원격으로 조정, 스마트폰 화면 위에서 전자피아노 연주하기, 전자책 넘기기, 화면스크롤하기 등을 시연해냈다.
※ 액츄에이터 : 전기적 신호를 기계적 운동으로 변환하는 장치
일종의 디지털 촉각인 ‘햅틱’을 구현, 사람 또는 전자디바이스와 섬세한 피드백을 주고받는 한편 가상현실이나 증강현실을 보다 실감나게 하려는 연구가 활발하다.
주로 부드러운 인공근육 기반 소프트 액츄에이터에 대한 연구가 많이 이뤄지고 있지만, 낮은 전압에서는 반응속도가 너무 느려 터치형 액츄에이터로 활용하기에 어려움이 있었다.
인체에 나쁜 영향을 주거나 디바이스의 오작동을 유발하지 않으면서 터치 피드백을 주고받기 위해서는 저전압 구동이 전제되어야 하기 때문이다.
이에 연구팀은 저전압에서도 빠르게 반응할 수 있는 높은 효율의 소프트 액츄에이터를 위한 새로운 소재를 물색하였다.
유연성을 위해 금속을 배제한 공유결합으로 된 다공성 고리화합물(*트라이어진 고리)을 합성하고 널리 쓰이는 전도성 고분자(PE DOT-PSS)를 결합했다.
※ 트라이어진 고리(Covalent Triazine Framework, CTF) : 다공성 내인성 미세조도(PIM-1) 고분자로 이루어진 물질
실제 이 소재의 액츄에이터로 만든 인공손가락은 낮은 전압(±0.5V)으로도 빠르게 큰 변형을 만들 수 있어 부드러운 터치반응을 유도할 수 있었다.
핵심은 다공성 탄소구조체로 인해 비표면적을 극대화한 것이다. 비표적을 넓혀 표면전하량을 늘리는 한편 작동속도와 반응성도 높일 수 있었다. 실제 0.5V에서 17mm 정도 구부러지는 변형을 확인했다.
개발된 소프트 터치 액츄에이터를 배열형태로 확장하여 스마트폰 전자피아노 어플리케이션 위에서 연속적 터치를 통해서‘Happy Birthday’를 연주하였으며 전자책넘기기와 화면스크롤 기능 등을 구현했다.
과학기술정보통신부와 한국연구재단이 추진하는 리더연구사업(창의연구)의 지원으로 수행된 이번 연구의 성과는 국제학술지 ‘네이처 커뮤니케이션스(Nature Communications)’에 10월 23일 게재됐다.
액정화면 깨뜨리지 않고 부드럽게 터치하는 인공손가락 개발
우리 대학 연구진이 액정 같이 깨어지기 쉬운 화면을 부드럽게 터치해 다양한 작업을 할 수 있는 인공손가락을 선보였다.
기계공학과 오일권 교수 연구팀이 스마트폰이나 햅틱 반응형 디스플레이를 정교하게 터치할 수 있는 소프트 터치 액츄에이터 기술을 개발했다고 밝혔다.
연구팀은 부드럽고 얇은 박막형의 소프트 터치 *액츄에이터를 원격으로 조정, 스마트폰 화면 위에서 전자피아노 연주하기, 전자책 넘기기, 화면스크롤하기 등을 시연해냈다.
※ 액츄에이터 : 전기적 신호를 기계적 운동으로 변환하는 장치
일종의 디지털 촉각인 ‘햅틱’을 구현, 사람 또는 전자디바이스와 섬세한 피드백을 주고받는 한편 가상현실이나 증강현실을 보다 실감나게 하려는 연구가 활발하다.
주로 부드러운 인공근육 기반 소프트 액츄에이터에 대한 연구가 많이 이뤄지고 있지만, 낮은 전압에서는 반응속도가 너무 느려 터치형 액츄에이터로 활용하기에 어려움이 있었다.
인체에 나쁜 영향을 주거나 디바이스의 오작동을 유발하지 않으면서 터치 피드백을 주고받기 위해서는 저전압 구동이 전제되어야 하기 때문이다.
이에 연구팀은 저전압에서도 빠르게 반응할 수 있는 높은 효율의 소프트 액츄에이터를 위한 새로운 소재를 물색하였다.
유연성을 위해 금속을 배제한 공유결합으로 된 다공성 고리화합물(*트라이어진 고리)을 합성하고 널리 쓰이는 전도성 고분자(PE DOT-PSS)를 결합했다.
※ 트라이어진 고리(Covalent Triazine Framework, CTF) : 다공성 내인성 미세조도(PIM-1) 고분자로 이루어진 물질
실제 이 소재의 액츄에이터로 만든 인공손가락은 낮은 전압(±0.5V)으로도 빠르게 큰 변형을 만들 수 있어 부드러운 터치반응을 유도할 수 있었다.
핵심은 다공성 탄소구조체로 인해 비표면적을 극대화한 것이다. 비표적을 넓혀 표면전하량을 늘리는 한편 작동속도와 반응성도 높일 수 있었다. 실제 0.5V에서 17mm 정도 구부러지는 변형을 확인했다.
개발된 소프트 터치 액츄에이터를 배열형태로 확장하여 스마트폰 전자피아노 어플리케이션 위에서 연속적 터치를 통해서‘Happy Birthday’를 연주하였으며 전자책넘기기와 화면스크롤 기능 등을 구현했다.
과학기술정보통신부와 한국연구재단이 추진하는 리더연구사업(창의연구)의 지원으로 수행된 이번 연구의 성과는 국제학술지 ‘네이처 커뮤니케이션스(Nature Communications)’에 10월 23일 게재됐다.
2020.11.05
조회수 35006
-
 기계공학과 공경철 교수팀, 워크온슈트4 및 사이배슬론 2020 출전 선수 공개
우리대학 기계공학과 공경철 교수가 연세대학교 의과대학 세브란스병원 나동욱 교수와 공동 개발한 웨어러블 로봇인 '워크온슈트 4' 및 사이배슬론(Cybathlon) 2020' 대회에 출전할 선수를 15일 공개했다.
워크온슈트 4는 사이배슬론 2020에 출전하기 위해 새롭게 개발한 모델로 두 다리를 감싸는 외골격형 로봇이다. 모터를 이용한 힘으로 하반신을 전혀 사용하지 못하는 장애인들의 움직임을 보조할 수 있다. 일어나 걷는 등의 기본적인 동작은 물론 계단·오르막/내리막·옆경사·문 열기·험지 등 일상생활에서 자주 접하게 되는 장애물을 극복할 수 있도록 제작됐다.
이전까지 개발된 하반신 마비 장애인을 위한 웨어러블 로봇은 장시간 사용하기 어렵다는 한계가 존재했다. 하반신 기능을 소실해 근육 등 신체 기능이 퇴화한 장애인들이 로봇을 착용하고 움직이려면 수십 kg에 이르는 무게를 감당해야 했기 때문이다.
연구팀은 문제를 해결하기 위해 인체가 이루는 자연스러운 균형을 모사해 로봇의 무게중심을 설계하는 기술을 고안했다. 사용자 신체 각 부위에 정밀하게 밀착되는 착용부를 만든 뒤, 로봇 관절의 기준 위치를 조절해 무게중심을 정밀하게 맞춘 것이다.
또한, 착용자의 긴장 정도나 지면의 상태와 같은 외부 요인을 지능적으로 관측하고 제어하는 기술도 더했다. 로봇이 제공해야 하는 보조력은 사용하는 환경에 따라 크게 달라진다. 워크온슈트 4는 로봇이 착용자의 걸음을 30보 이내로 분석해 가장 적합한 보행패턴을 찾아 맞춤형으로 제공한다.
이를 통해, 하반신 마비 장애인들이 웨어러블 로봇을 착용하고 장시간 걷거나 설 수 있도록 월등하게 기능을 끌어올렸고 연속보행 시 1분당 40m 이상을 걸을 수 있게 된 성과도 거뒀다.
이는, 시간당 2~4km가량을 걷는 비장애인의 정상 보행 속도와 견줄만한 수준으로 그동안 전 세계적으로 보고된 하반신 완전 마비 장애인의 보행 기록 중 가장 빠른 속도다.
연구팀은 활발한 기술협력을 통해 일부 부품을 제외한 대부분의 구성 요소를 국산 기술로 완성했다. 로봇의 구조설계와 시스템 소프트웨어는 공경철·나동욱 교수가 공동 창업한 ㈜엔젤로보틱스에서 주도했다. 공학적 설계와 제어는 공경철 교수가, 보행 보조기로서의 구조와 대상자를 위한 필수 기능 등을 점검하는 생체역학 분야는 나동욱 교수가 분담해 맡았다.
개인맞춤형 탄소섬유 착용부는 재활공학연구소에서 연구를 진행했으며 로봇의 동작 생성과 디자인은 영남대학교 로봇기계공학과와 ㈜에스톡스가 각각 담당했다.
한편, 우리나라를 대표해 올해 개최예정인 `사이배슬론 2020'에 출전할 선수들은 지난 2월 KAIST에서 열린 선발전을 통해 결정됐다.
앉고 서서 물컵 정리하기·지그재그 장애물 통과·험지 보행·옆경사 보행 등 실제 대회에서 수행하게 될 미션이 선발전 평가항목으로 채택됐는데 작년 9월부터 출전을 준비해온 7명의 후보 선수 중 4명이 참가해 경기를 치렀다.
그 결과, 각각 2분 24초와 3분 35초의 기록으로 4개의 미션을 완수한 김병욱 씨(남, 46세)와 이주현 씨(여, 19세)가 국제대회에 출전할 최종 선수로 선발됐다.
현재 워크온슈트 4의 로봇기술은 선발된 두 선수의 개별적인 특성에 맞게 최적화되었으며, 두 선수 모두 6개의 모든 미션을 5분대에 통과할 정도로 기록이 향상되었다.
지금까지는 미국팀과 스위스팀이 4개의 미션을 6분대에 수행하는 기록을 공개했으며, 그 외 사이배슬론 참가팀은 모든 미션을 완벽하게 수행하지 못하는 단계에 머물러 있다.
선발전 1위에 오른 김병욱 씨는 1998년 뺑소니 사고로 장애를 얻은 뒤 2015년 공 교수 연구팀에 합류했다. 2016년 스위스에서 열린 제1회 사이배슬론 대회에서 워크온슈트의 초기모델을 착용하고 동메달을 딴 주인공으로 "우리나라의 웨어러블 로봇기술이 세계 최고 수준임을 직접 보여줄 것ˮ이라는 포부를 밝혔다.
2위에 오른 이주현 씨는 고등학교 3학년에 재학 중이던 작년 불의의 교통사고로 하반신이 마비됐다. 같은 해 6월 연구팀에 합류해 사이배슬론 2020 출전을 위한 훈련과 수능 시험을 준비를 병행했으며, 올해 초 최종 선수 선발 및 이화여대 정치외교학과 합격의 영광을 동시에 안았다.
공경철 KAIST 기계공학과 교수는 "지난 대회 이후 4년 동안 모든 연구원과 협력 기관들이 하나가 되어 수준 높은 기술을 개발할 수 있었고 선수들과도 큰 어려움 없이 훈련했다ˮ고 전했다. 이어, "다가올 국제대회는 워크온슈트 4의 기술적 우월성을 전 세계에 증명하는 중요한 무대가 될 것ˮ이라며 강한 자신감을 보였다.
기계공학과 공경철 교수팀, 워크온슈트4 및 사이배슬론 2020 출전 선수 공개
우리대학 기계공학과 공경철 교수가 연세대학교 의과대학 세브란스병원 나동욱 교수와 공동 개발한 웨어러블 로봇인 '워크온슈트 4' 및 사이배슬론(Cybathlon) 2020' 대회에 출전할 선수를 15일 공개했다.
워크온슈트 4는 사이배슬론 2020에 출전하기 위해 새롭게 개발한 모델로 두 다리를 감싸는 외골격형 로봇이다. 모터를 이용한 힘으로 하반신을 전혀 사용하지 못하는 장애인들의 움직임을 보조할 수 있다. 일어나 걷는 등의 기본적인 동작은 물론 계단·오르막/내리막·옆경사·문 열기·험지 등 일상생활에서 자주 접하게 되는 장애물을 극복할 수 있도록 제작됐다.
이전까지 개발된 하반신 마비 장애인을 위한 웨어러블 로봇은 장시간 사용하기 어렵다는 한계가 존재했다. 하반신 기능을 소실해 근육 등 신체 기능이 퇴화한 장애인들이 로봇을 착용하고 움직이려면 수십 kg에 이르는 무게를 감당해야 했기 때문이다.
연구팀은 문제를 해결하기 위해 인체가 이루는 자연스러운 균형을 모사해 로봇의 무게중심을 설계하는 기술을 고안했다. 사용자 신체 각 부위에 정밀하게 밀착되는 착용부를 만든 뒤, 로봇 관절의 기준 위치를 조절해 무게중심을 정밀하게 맞춘 것이다.
또한, 착용자의 긴장 정도나 지면의 상태와 같은 외부 요인을 지능적으로 관측하고 제어하는 기술도 더했다. 로봇이 제공해야 하는 보조력은 사용하는 환경에 따라 크게 달라진다. 워크온슈트 4는 로봇이 착용자의 걸음을 30보 이내로 분석해 가장 적합한 보행패턴을 찾아 맞춤형으로 제공한다.
이를 통해, 하반신 마비 장애인들이 웨어러블 로봇을 착용하고 장시간 걷거나 설 수 있도록 월등하게 기능을 끌어올렸고 연속보행 시 1분당 40m 이상을 걸을 수 있게 된 성과도 거뒀다.
이는, 시간당 2~4km가량을 걷는 비장애인의 정상 보행 속도와 견줄만한 수준으로 그동안 전 세계적으로 보고된 하반신 완전 마비 장애인의 보행 기록 중 가장 빠른 속도다.
연구팀은 활발한 기술협력을 통해 일부 부품을 제외한 대부분의 구성 요소를 국산 기술로 완성했다. 로봇의 구조설계와 시스템 소프트웨어는 공경철·나동욱 교수가 공동 창업한 ㈜엔젤로보틱스에서 주도했다. 공학적 설계와 제어는 공경철 교수가, 보행 보조기로서의 구조와 대상자를 위한 필수 기능 등을 점검하는 생체역학 분야는 나동욱 교수가 분담해 맡았다.
개인맞춤형 탄소섬유 착용부는 재활공학연구소에서 연구를 진행했으며 로봇의 동작 생성과 디자인은 영남대학교 로봇기계공학과와 ㈜에스톡스가 각각 담당했다.
한편, 우리나라를 대표해 올해 개최예정인 `사이배슬론 2020'에 출전할 선수들은 지난 2월 KAIST에서 열린 선발전을 통해 결정됐다.
앉고 서서 물컵 정리하기·지그재그 장애물 통과·험지 보행·옆경사 보행 등 실제 대회에서 수행하게 될 미션이 선발전 평가항목으로 채택됐는데 작년 9월부터 출전을 준비해온 7명의 후보 선수 중 4명이 참가해 경기를 치렀다.
그 결과, 각각 2분 24초와 3분 35초의 기록으로 4개의 미션을 완수한 김병욱 씨(남, 46세)와 이주현 씨(여, 19세)가 국제대회에 출전할 최종 선수로 선발됐다.
현재 워크온슈트 4의 로봇기술은 선발된 두 선수의 개별적인 특성에 맞게 최적화되었으며, 두 선수 모두 6개의 모든 미션을 5분대에 통과할 정도로 기록이 향상되었다.
지금까지는 미국팀과 스위스팀이 4개의 미션을 6분대에 수행하는 기록을 공개했으며, 그 외 사이배슬론 참가팀은 모든 미션을 완벽하게 수행하지 못하는 단계에 머물러 있다.
선발전 1위에 오른 김병욱 씨는 1998년 뺑소니 사고로 장애를 얻은 뒤 2015년 공 교수 연구팀에 합류했다. 2016년 스위스에서 열린 제1회 사이배슬론 대회에서 워크온슈트의 초기모델을 착용하고 동메달을 딴 주인공으로 "우리나라의 웨어러블 로봇기술이 세계 최고 수준임을 직접 보여줄 것ˮ이라는 포부를 밝혔다.
2위에 오른 이주현 씨는 고등학교 3학년에 재학 중이던 작년 불의의 교통사고로 하반신이 마비됐다. 같은 해 6월 연구팀에 합류해 사이배슬론 2020 출전을 위한 훈련과 수능 시험을 준비를 병행했으며, 올해 초 최종 선수 선발 및 이화여대 정치외교학과 합격의 영광을 동시에 안았다.
공경철 KAIST 기계공학과 교수는 "지난 대회 이후 4년 동안 모든 연구원과 협력 기관들이 하나가 되어 수준 높은 기술을 개발할 수 있었고 선수들과도 큰 어려움 없이 훈련했다ˮ고 전했다. 이어, "다가올 국제대회는 워크온슈트 4의 기술적 우월성을 전 세계에 증명하는 중요한 무대가 될 것ˮ이라며 강한 자신감을 보였다.
2020.06.15
조회수 22616
-
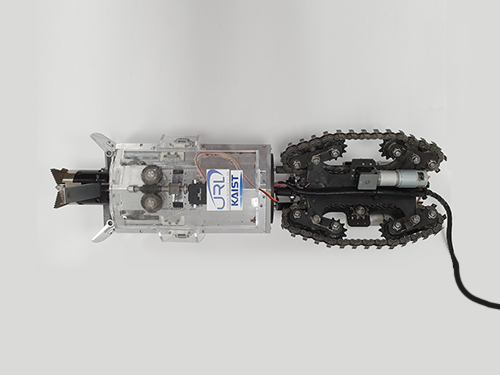 지하 공간 탐사를 위한 생체모방형 두더지 로봇 개발
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 일명 두더지 로봇인 `몰봇(Mole-bot)'을 개발했다. 이는 두더지의 생물학적 구조와 굴착 습성을 모방해 무인 지하 탐사나 극한지역 또는 우주행성 탐사에 효율적으로 활용가능한 생체모방형 로봇이다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체해 신 에너지원으로 사용 가능한 탄층 메탄가스(Coalbed Methane)나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 우주 행성의 표본 채취를 목표로 연구팀에 의해 개발됐다.
기존 천부 굴착작업은 시추기와 파이프라인, 펌프 등 각종 장비를 조합해 작업을 진행해야 하지만 이제 `몰봇' 로봇 하나면 모든 작업을 원활히 수행할 수 있다. 이를 임베디드 방식이라고 표현하는데, 특히 `몰봇' 개발을 계기로 기존의 거대하고 복잡한 드릴링 장비 사용과 이로 인한 복잡한 공정, 환경 오염 유발 등 많은 문제점이 해결될 것으로 기대된다.
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다. 우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 `치젤 투스(Chisel tooth mole)'를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨구조를 모사해 설계했다. 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다. 연구팀은 이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360°자유롭게 방향 전환이 가능하다. 몰봇은 굴착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
마지막으로 이동부는 동일한 3개의 유닛을 삼각형 형태(120°간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
연구팀은 이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 지하 환경은 주변이 암석과 흙으로 이뤄져있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어둡기 때문에 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했는데 이 결과, 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다. 즉, 연구팀은 지구 자기장 시계열 데이터를 매칭시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 자체적으로 개발해 로봇 위치를 측정하는 문제를 해결했으며, 이는 지하공간에서의 3차원적인 자율 주행을 가능케한다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며, 총 4개의 항목에서 평가를 받았다. 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도로, 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
명 교수 연구팀은 몰봇이 기존 로봇들에 반해 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나고, 최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것으로 기대하고 있다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다. 그동안의 연구성과물로는 해외 우수저널 논문 5건 게재, 국제 학술대회 발표 12건, 국내 학술대회 발표 4건, 특허 출원 및 등록은 각각 3건과 1건의 실적을 기록했고 특히 국제 학술대회 우수발표상 및 국내학술대회 우수논문상을 각 1건씩 수상했다.
개발된 두더지 로봇인 `몰봇'의 구동 및 굴진 영상은 아래 주소에서 확인할 수 있다.
URL: https://youtu.be/pEnKy5UYEYQ
한편, 이번 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐다.
지하 공간 탐사를 위한 생체모방형 두더지 로봇 개발
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 일명 두더지 로봇인 `몰봇(Mole-bot)'을 개발했다. 이는 두더지의 생물학적 구조와 굴착 습성을 모방해 무인 지하 탐사나 극한지역 또는 우주행성 탐사에 효율적으로 활용가능한 생체모방형 로봇이다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체해 신 에너지원으로 사용 가능한 탄층 메탄가스(Coalbed Methane)나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 우주 행성의 표본 채취를 목표로 연구팀에 의해 개발됐다.
기존 천부 굴착작업은 시추기와 파이프라인, 펌프 등 각종 장비를 조합해 작업을 진행해야 하지만 이제 `몰봇' 로봇 하나면 모든 작업을 원활히 수행할 수 있다. 이를 임베디드 방식이라고 표현하는데, 특히 `몰봇' 개발을 계기로 기존의 거대하고 복잡한 드릴링 장비 사용과 이로 인한 복잡한 공정, 환경 오염 유발 등 많은 문제점이 해결될 것으로 기대된다.
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다. 우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 `치젤 투스(Chisel tooth mole)'를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨구조를 모사해 설계했다. 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다. 연구팀은 이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360°자유롭게 방향 전환이 가능하다. 몰봇은 굴착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
마지막으로 이동부는 동일한 3개의 유닛을 삼각형 형태(120°간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
연구팀은 이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 지하 환경은 주변이 암석과 흙으로 이뤄져있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어둡기 때문에 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했는데 이 결과, 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다. 즉, 연구팀은 지구 자기장 시계열 데이터를 매칭시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 자체적으로 개발해 로봇 위치를 측정하는 문제를 해결했으며, 이는 지하공간에서의 3차원적인 자율 주행을 가능케한다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며, 총 4개의 항목에서 평가를 받았다. 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도로, 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
명 교수 연구팀은 몰봇이 기존 로봇들에 반해 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나고, 최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것으로 기대하고 있다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다. 그동안의 연구성과물로는 해외 우수저널 논문 5건 게재, 국제 학술대회 발표 12건, 국내 학술대회 발표 4건, 특허 출원 및 등록은 각각 3건과 1건의 실적을 기록했고 특히 국제 학술대회 우수발표상 및 국내학술대회 우수논문상을 각 1건씩 수상했다.
개발된 두더지 로봇인 `몰봇'의 구동 및 굴진 영상은 아래 주소에서 확인할 수 있다.
URL: https://youtu.be/pEnKy5UYEYQ
한편, 이번 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐다.
2020.06.05
조회수 17986
-
 로봇 손의 미끄럼 막아주는 인공 피부 개발
우리대학 기계공학과 박형순, 김택수 교수 연구팀이 사람 손바닥 피부의 기계적 특성을 모사, 로봇 손의 조작성능을 높여줄 인공피부를 개발했다.
의수나 산업용 집게, 산업용 로봇손 등에 부착하는 것만으로 물체 조작 능력이나 작업능력을 향상시킬 유용한 말단 인터페이스가 될 수 있을지 기대된다.
기존 기능성 인공피부가 주로 미관상 기능이나 감각기능 재현에 초점을 두었던데 반해, 이번에 개발된 인공피부는 구조 그 자체로 조작기능 향상에 기여하기에 복잡한 제어알고리즘이나 추가적인 동작 없이 간단히 부착하는 것만으로 조작성능 향상을 도울 수 있다.
연구팀은 손바닥 피부를 물리적 장벽이자 다양한 감각을 수용하는 기관으로만 보지 않고, 임의의 모양의 물체에 밀착되도록 변형되면서 물체를 안정적으로 고정한다는 점에서 손의 조작기능에 영향을 미치는 중요한 변수로 주목했다.
이에 손바닥 피부를 겉 피부층, 피하지방층, 근육층으로 구조화하여 각 특성을 분석, 피하 지방층의 비대칭적인 물리적 특성이 기능적 장점을 만들어 내는 핵심요소임을 알아냈다. 부드러운 지방조직과 질긴 섬유질 조직이 복합되어 누름에 유연하면서도 비틀림이나 당김에 의한 변형에 대해서는 강인하게 버틸 수 있다는 것이다.
이를 토대로 손바닥처럼 말랑한 다공성 라텍스 및 실리콘을 이용해 손바닥 피부와 동일한 비선형적·비대칭적 물리적 특성을 지니는 3중층 인공피부를 제작했다. 기공들이 누름에 대해서는 쉽게 압축되어 물체의 형상에 맞게 쉽게 변형되도록 하는 한편, 기공 사이사이 질긴 라텍스 격벽이 비틀림이나 당김에 강하게 저항함으로써 대상 물체를 견고하게 잡을 수 있도록 한 것이다.
실제 이렇게 만들어진 3중층 인공피부를 부착한 로봇 손은 기존 실리콘 소재의 단일층 인공피부를 부착한 로봇 손 대비 물체를 고정할 수 있는 작업 안정성과 물체를 움직일 수 있는 조작성이 30% 향상된 것으로 나타났다.
연구팀은 향후 나사처럼 작은 물체나 계란처럼 쉽게 깨질 수 있는 매끄러운 물체 등 조작대상의 크기나 단단함, 표면특성을 고려하여 인공피부의 질감, 두께, 형상을 조절하는 등 용도에 맞는 최적의 피부구조를 설계하는 방안에 대한 연구를 지속할 계획이다.
이반 연구는 과학기술정보통신부와 한국연구재단이 추진하는 바이오닉암메카트로 닉스융합연구사업 및 선도연구센터사업의 지원으로 수행되었으며, 신소재 분야 국제학술지‘어드밴스드 펑셔널 머티리얼즈(Advanced Functional Materials)’ 속표지 논문으로 5월 8일 선공개 되었다.
로봇 손의 미끄럼 막아주는 인공 피부 개발
우리대학 기계공학과 박형순, 김택수 교수 연구팀이 사람 손바닥 피부의 기계적 특성을 모사, 로봇 손의 조작성능을 높여줄 인공피부를 개발했다.
의수나 산업용 집게, 산업용 로봇손 등에 부착하는 것만으로 물체 조작 능력이나 작업능력을 향상시킬 유용한 말단 인터페이스가 될 수 있을지 기대된다.
기존 기능성 인공피부가 주로 미관상 기능이나 감각기능 재현에 초점을 두었던데 반해, 이번에 개발된 인공피부는 구조 그 자체로 조작기능 향상에 기여하기에 복잡한 제어알고리즘이나 추가적인 동작 없이 간단히 부착하는 것만으로 조작성능 향상을 도울 수 있다.
연구팀은 손바닥 피부를 물리적 장벽이자 다양한 감각을 수용하는 기관으로만 보지 않고, 임의의 모양의 물체에 밀착되도록 변형되면서 물체를 안정적으로 고정한다는 점에서 손의 조작기능에 영향을 미치는 중요한 변수로 주목했다.
이에 손바닥 피부를 겉 피부층, 피하지방층, 근육층으로 구조화하여 각 특성을 분석, 피하 지방층의 비대칭적인 물리적 특성이 기능적 장점을 만들어 내는 핵심요소임을 알아냈다. 부드러운 지방조직과 질긴 섬유질 조직이 복합되어 누름에 유연하면서도 비틀림이나 당김에 의한 변형에 대해서는 강인하게 버틸 수 있다는 것이다.
이를 토대로 손바닥처럼 말랑한 다공성 라텍스 및 실리콘을 이용해 손바닥 피부와 동일한 비선형적·비대칭적 물리적 특성을 지니는 3중층 인공피부를 제작했다. 기공들이 누름에 대해서는 쉽게 압축되어 물체의 형상에 맞게 쉽게 변형되도록 하는 한편, 기공 사이사이 질긴 라텍스 격벽이 비틀림이나 당김에 강하게 저항함으로써 대상 물체를 견고하게 잡을 수 있도록 한 것이다.
실제 이렇게 만들어진 3중층 인공피부를 부착한 로봇 손은 기존 실리콘 소재의 단일층 인공피부를 부착한 로봇 손 대비 물체를 고정할 수 있는 작업 안정성과 물체를 움직일 수 있는 조작성이 30% 향상된 것으로 나타났다.
연구팀은 향후 나사처럼 작은 물체나 계란처럼 쉽게 깨질 수 있는 매끄러운 물체 등 조작대상의 크기나 단단함, 표면특성을 고려하여 인공피부의 질감, 두께, 형상을 조절하는 등 용도에 맞는 최적의 피부구조를 설계하는 방안에 대한 연구를 지속할 계획이다.
이반 연구는 과학기술정보통신부와 한국연구재단이 추진하는 바이오닉암메카트로 닉스융합연구사업 및 선도연구센터사업의 지원으로 수행되었으며, 신소재 분야 국제학술지‘어드밴스드 펑셔널 머티리얼즈(Advanced Functional Materials)’ 속표지 논문으로 5월 8일 선공개 되었다.
2020.06.01
조회수 13797
-
 스티브 박 교수, 김정 교수, 3차원 표면 코팅 가능한 로봇피부 개발
〈(왼쪽부터) 오진원 석사과정, 스티브박 교수, 양준창 박사과정 〉
우리 대학 신소재공학과 스티브 박 교수, 기계공학과 김정 교수 공동 연구팀이 3차원 표면에 코팅이 가능하며 자극을 구분할 수 있는 로봇피부를 개발했다.
오진원 석사과정, 양준창 박사과정이 공동 1저자, 박현규 석사과정이 참여한 이번 연구는 국제학술지 ‘에이씨에스 나노(ACS Nano)’ 8월 28자 표지논문으로 게재됐다.
오늘날 로봇연구는 인간과 같은 기능을 가진 휴머노이드, 몸에 착용하는 헬스케어 장치 등 인간처럼 촉각을 구현하려는 연구가 활발히 진행되고 있다.
연구팀은 로봇의 복잡한 형상에 균일하게 코팅할 수 있는 로봇피부를 개발했다. 균일한 코팅은 로봇피부에 가해진 자극을 보다 정확히 측정할 수 있게 해주는 핵심 기술이다.
개발된 로봇피부 용액을 원하는 물체에 뿌린 뒤 굳히면 로봇피부가 형성된다. 매우 간편한 용액공정을 통해 제작하므로 저비용으로 대면적 및 대량생산이 가능하다. 또한 복잡한 형태를 지닌 로봇에도 적용할 수 있다.
특히 이 로봇피부는 인간과 같이 압력과 인장력을 구분해낸다. 수직 압력과 마찰에 대해 로봇피부의 내부구조가 각각 다르게 변형되기 때문에 이들을 구분할 수 있다.
또한 의료영상 기법 중 하나인 전기임피던스영상(EIT) 기술을 이용함으로써 복잡한 전기 배선 없이 로봇피부에 마찰이 가해지는 곳을 정확히 측정했다.
스티브 박 교수는 “개발된 로봇피부는 저비용으로 대량생산이 가능하며, 복잡한 3차원 표면에도 손쉽게 코팅이 가능하다”며, ”로봇피부의 상용화에 한 걸음 가까워질 수 있는 원천기술이다”라고 말했다.
이번 연구는 과학기술정보통신부·한국연구재단 기초연구사업(신진연구) 지원으로 수행됐다.
□ 그림 설명
그림1. 3차원 표면 코팅이 가능한 로봇피부 모식도 (ACS 나노 8월호 표지)
그림2. 전기임피던스영상법을 활용한 다양한 자극 측정
그림3. 다양한 코팅법을 활용한 로봇피부의 제작 및 로봇피부 신호 확인
스티브 박 교수, 김정 교수, 3차원 표면 코팅 가능한 로봇피부 개발
〈(왼쪽부터) 오진원 석사과정, 스티브박 교수, 양준창 박사과정 〉
우리 대학 신소재공학과 스티브 박 교수, 기계공학과 김정 교수 공동 연구팀이 3차원 표면에 코팅이 가능하며 자극을 구분할 수 있는 로봇피부를 개발했다.
오진원 석사과정, 양준창 박사과정이 공동 1저자, 박현규 석사과정이 참여한 이번 연구는 국제학술지 ‘에이씨에스 나노(ACS Nano)’ 8월 28자 표지논문으로 게재됐다.
오늘날 로봇연구는 인간과 같은 기능을 가진 휴머노이드, 몸에 착용하는 헬스케어 장치 등 인간처럼 촉각을 구현하려는 연구가 활발히 진행되고 있다.
연구팀은 로봇의 복잡한 형상에 균일하게 코팅할 수 있는 로봇피부를 개발했다. 균일한 코팅은 로봇피부에 가해진 자극을 보다 정확히 측정할 수 있게 해주는 핵심 기술이다.
개발된 로봇피부 용액을 원하는 물체에 뿌린 뒤 굳히면 로봇피부가 형성된다. 매우 간편한 용액공정을 통해 제작하므로 저비용으로 대면적 및 대량생산이 가능하다. 또한 복잡한 형태를 지닌 로봇에도 적용할 수 있다.
특히 이 로봇피부는 인간과 같이 압력과 인장력을 구분해낸다. 수직 압력과 마찰에 대해 로봇피부의 내부구조가 각각 다르게 변형되기 때문에 이들을 구분할 수 있다.
또한 의료영상 기법 중 하나인 전기임피던스영상(EIT) 기술을 이용함으로써 복잡한 전기 배선 없이 로봇피부에 마찰이 가해지는 곳을 정확히 측정했다.
스티브 박 교수는 “개발된 로봇피부는 저비용으로 대량생산이 가능하며, 복잡한 3차원 표면에도 손쉽게 코팅이 가능하다”며, ”로봇피부의 상용화에 한 걸음 가까워질 수 있는 원천기술이다”라고 말했다.
이번 연구는 과학기술정보통신부·한국연구재단 기초연구사업(신진연구) 지원으로 수행됐다.
□ 그림 설명
그림1. 3차원 표면 코팅이 가능한 로봇피부 모식도 (ACS 나노 8월호 표지)
그림2. 전기임피던스영상법을 활용한 다양한 자극 측정
그림3. 다양한 코팅법을 활용한 로봇피부의 제작 및 로봇피부 신호 확인
2018.09.13
조회수 17983
-
 유연 원격 내시경 수술로봇 K-FLEX로 동물실험 성공
〈이동호 박사과정, 네덜란드 라드바우드 대학 록사나 교수, 황민호 박사, 안정도 박사과정, 권동수 교수〉
우리 대학 기계공학과 미래의료로봇연구단(소장 권동수 교수)이 개발한 유연 원격 내시경수술로봇 ‘케이-플렉스(K-FLEX)’가 살아있는 동물의 담낭을 절개하는 수술에 성공했다.
지난 7월 17일 연구팀은 돼지를 통한 전 임상실험을 진행했다. 복강에 삽입된 유연 내시경 수술로봇을 이용해 담낭을 절개하는 실험이며 복강 내 로봇의 정밀 제어기술과 소형관절 설계기술이 핵심 기반기술이다.
이번 연구를 통해 전량을 수입에 의존하는 국내 연성 내시경 시장의 활로 개척과 더불어 암 치료 관련 사회적 비용의 축소 효과를 기대할 수 있을 것으로 전망된다.
연구팀의 케이-플렉스 로봇은 입이나 항문, 요도 등 우리 몸에 존재하는 통로를 따라 뱀처럼 유연하게 삽입돼 몸속을 자유롭게 관찰한다. 이상이 있는 경우 손가락처럼 생긴 초소형 로봇 팔이 나와 수술을 진행한다.
기존의 상용화된 수술 로봇은 곧은 수술도구를 이용하고 복부에 3~4개의 구멍을 내야 하는 문제점이 있는 반면 연구팀의 기술은 외부절개 없이 내부절개만으로 수술이 가능해 출혈량, 세균 감염, 합병증 등의 위험을 줄일 수 있다.
이러한 장점에도 불구하고 이 기술은 상용화가 활발하지 않다. 수술에 요구되는 기술의 난이도가 높고 필요조건들이 많기 때문이다. 로봇이 인체 내부의 굴곡진 부분으로 진입하기 위해 유연하면서도 큰 힘을 낼 수 있어야 하고, 기존 수술 로봇보다 더 많은 공간적 제약을 받는다.
연구팀은 위와 같은 유연성과 소형화 문제를 해결할 수 있는 강인한 소형 관절 기술을 개발했다. 핵심 연구원인 황민호 박사의 연구를 통해 초소형 로봇 팔이 낼 수 있는 힘을 두 배 이상 끌어올리는 동시에 크기도 절반으로 축소시켰다.
곧은 직선 형태의 수술 기술과 달리 유연 수술 로봇 기술은 전 세계적으로도 발전되지 않은 상황이다. 권 교수 연구팀은 내시경 모듈을 제외한 모든 부품과 소프트웨어를 순수 국내 기술을 통해 개발했다.
연구팀은 국립암센터 손대경 교수 연구팀의 협조를 통해 돼지 배의 표면에 만든 절개 부위에 다양한 방향과 각도로 휘어지는 유연 내시경 수술로봇을 삽입하고 병변이 위치한 간과 담낭으로 로봇을 접근시켰다.
이후 내시경의 채널을 통과한 직경 3.7mm의 소형 수술도구가 간을 젖히며 수술을 위한 시야 확보를 한 뒤 다른 채널을 통과한 전기 소작기를 이용해 간과 담낭 사이를 절제했다.
모든 수술 과정은 연구팀이 내시경의 앞부분에 설치한 카메라를 통해 송출된 돼지 신체 내부를 모니터링하며 원격 조종 장치를 통해 진행됐다.
한편 연구팀은 이 기술을 통해 지난 6월 29일 영국 런던 임페리얼 컬리지에서 열린 ‘서지컬 로봇 챌린지 2018(Surgical Robot Challenge 2018)’에서 수술로봇 강국들을 제치고 ‘베스트 어플리케이션 어워드’와 ‘오버롤 위너’상을 동시에 수상하기도 했다.
이번 연구를 총괄한 권동수 교수는 “이번 실험의 의미는 국내 최초로 유연한 내시경로봇을 살아있는 동물의 복강 내에서 이동시켜 병변에 접근시키고 수술을 진행함으로써 임상 적용의 가능성을 확인했다는 의미를 갖는다”고 말했다.
권 교수 연구팀은 이러한 핵심기술을 기반으로 2018년도 ‘이지엔도서지컬(EasyEndo Surgical Inc.)’이라는 수술로봇 회사를 설립했다. 권 교수를 비롯한 8명의 학생들이 공동 창업한 회사로, 케이-플렉스를 포함한 다양한 수술로봇을 개발하고 있다.
케이-플렉스 연구는 한국연구재단의 지원을 받아 수행됐다.
□ 사진 설명
사진1. K-FLEX 시스템 전체 그림
유연 원격 내시경 수술로봇 K-FLEX로 동물실험 성공
〈이동호 박사과정, 네덜란드 라드바우드 대학 록사나 교수, 황민호 박사, 안정도 박사과정, 권동수 교수〉
우리 대학 기계공학과 미래의료로봇연구단(소장 권동수 교수)이 개발한 유연 원격 내시경수술로봇 ‘케이-플렉스(K-FLEX)’가 살아있는 동물의 담낭을 절개하는 수술에 성공했다.
지난 7월 17일 연구팀은 돼지를 통한 전 임상실험을 진행했다. 복강에 삽입된 유연 내시경 수술로봇을 이용해 담낭을 절개하는 실험이며 복강 내 로봇의 정밀 제어기술과 소형관절 설계기술이 핵심 기반기술이다.
이번 연구를 통해 전량을 수입에 의존하는 국내 연성 내시경 시장의 활로 개척과 더불어 암 치료 관련 사회적 비용의 축소 효과를 기대할 수 있을 것으로 전망된다.
연구팀의 케이-플렉스 로봇은 입이나 항문, 요도 등 우리 몸에 존재하는 통로를 따라 뱀처럼 유연하게 삽입돼 몸속을 자유롭게 관찰한다. 이상이 있는 경우 손가락처럼 생긴 초소형 로봇 팔이 나와 수술을 진행한다.
기존의 상용화된 수술 로봇은 곧은 수술도구를 이용하고 복부에 3~4개의 구멍을 내야 하는 문제점이 있는 반면 연구팀의 기술은 외부절개 없이 내부절개만으로 수술이 가능해 출혈량, 세균 감염, 합병증 등의 위험을 줄일 수 있다.
이러한 장점에도 불구하고 이 기술은 상용화가 활발하지 않다. 수술에 요구되는 기술의 난이도가 높고 필요조건들이 많기 때문이다. 로봇이 인체 내부의 굴곡진 부분으로 진입하기 위해 유연하면서도 큰 힘을 낼 수 있어야 하고, 기존 수술 로봇보다 더 많은 공간적 제약을 받는다.
연구팀은 위와 같은 유연성과 소형화 문제를 해결할 수 있는 강인한 소형 관절 기술을 개발했다. 핵심 연구원인 황민호 박사의 연구를 통해 초소형 로봇 팔이 낼 수 있는 힘을 두 배 이상 끌어올리는 동시에 크기도 절반으로 축소시켰다.
곧은 직선 형태의 수술 기술과 달리 유연 수술 로봇 기술은 전 세계적으로도 발전되지 않은 상황이다. 권 교수 연구팀은 내시경 모듈을 제외한 모든 부품과 소프트웨어를 순수 국내 기술을 통해 개발했다.
연구팀은 국립암센터 손대경 교수 연구팀의 협조를 통해 돼지 배의 표면에 만든 절개 부위에 다양한 방향과 각도로 휘어지는 유연 내시경 수술로봇을 삽입하고 병변이 위치한 간과 담낭으로 로봇을 접근시켰다.
이후 내시경의 채널을 통과한 직경 3.7mm의 소형 수술도구가 간을 젖히며 수술을 위한 시야 확보를 한 뒤 다른 채널을 통과한 전기 소작기를 이용해 간과 담낭 사이를 절제했다.
모든 수술 과정은 연구팀이 내시경의 앞부분에 설치한 카메라를 통해 송출된 돼지 신체 내부를 모니터링하며 원격 조종 장치를 통해 진행됐다.
한편 연구팀은 이 기술을 통해 지난 6월 29일 영국 런던 임페리얼 컬리지에서 열린 ‘서지컬 로봇 챌린지 2018(Surgical Robot Challenge 2018)’에서 수술로봇 강국들을 제치고 ‘베스트 어플리케이션 어워드’와 ‘오버롤 위너’상을 동시에 수상하기도 했다.
이번 연구를 총괄한 권동수 교수는 “이번 실험의 의미는 국내 최초로 유연한 내시경로봇을 살아있는 동물의 복강 내에서 이동시켜 병변에 접근시키고 수술을 진행함으로써 임상 적용의 가능성을 확인했다는 의미를 갖는다”고 말했다.
권 교수 연구팀은 이러한 핵심기술을 기반으로 2018년도 ‘이지엔도서지컬(EasyEndo Surgical Inc.)’이라는 수술로봇 회사를 설립했다. 권 교수를 비롯한 8명의 학생들이 공동 창업한 회사로, 케이-플렉스를 포함한 다양한 수술로봇을 개발하고 있다.
케이-플렉스 연구는 한국연구재단의 지원을 받아 수행됐다.
□ 사진 설명
사진1. K-FLEX 시스템 전체 그림
2018.08.16
조회수 13384
-
 김정, 박인규 교수, 로봇의 피부 역할 할 수 있는 촉각센서 개발
우리 대학 기계공학과 김정, 박인규 교수 공동 연구팀이 실리콘과 탄소 소재를 활용한 로봇의 피부 역할을 할 수 있는 촉각 센서를 개발했다.
이 기술은 충격 흡수가 가능하면서 다양한 형태의 촉감을 구분할 수 있어 향후 로봇의 외피로 이용 가능할 것으로 기대된다.
이효상 박사과정이 1저자로 참여한 이번 연구결과는 네이처 자매지인 ‘사이언티픽 리포트(Scientific Report)’ 1월 25일자 온라인 판에 게재됐다.
피부는 인체에서 가장 많은 부분을 차지하는 기관이며 주요 장기를 외부 충격으로부터 보호하는 동시에 섬세한 촉각 정보를 측정 및 구분해 신경계에 전달하는 역할을 한다.
현재 로봇 감각 기술은 시각, 청각 부분에서는 인간의 능력에 근접하고 있으나 촉각의 경우는 환경의 변화를 온몸으로 감지하는 피부 능력에 비해 많이 부족한 것이 사실이다
인간과 비슷한 기능의 피부를 로봇에게 적용시키기 위해선 높은 신축성을 갖고 충격을 잘 흡수하는 피부 센서 기술의 개발이 필수이다. 전기 배선을 통해 몸 전체에 분포된 많은 센서를 연결하는 기술 또한 해결해야 할 문제이다.
연구팀은 문제 해결을 위해 실리콘과 탄소나노튜브(CNT)를 혼합해 복합재를 만들었고 이를 전기임피던스영상법(EIT)라는 의료 영상 기법과 결합했다. 이를 통해 넓은 영역에 가해지는 다양한 형태의 힘을 전기 배선 없이도 구분할 수 있는 기술을 개발했다.
이를 통해 개발된 로봇 피부는 망치로 내려치는 수준의 강한 충격도 견딜 수 있으며 센서의 일부가 파손돼도 파손 부위에 복합재를 채운 뒤 경화시키면 재사용이 가능하다.
또한 3D 프린터 등으로 만들어진 3차원 형상 틀에 실리콘-나노튜브 복합재를 채워 넣는 방식으로 제작할 수 있다. 기존 2차원 평판 뿐 아니라 다양한 3차원 곡면으로 제작이 가능해 새로운 형태의 컴퓨터 인터페이스도 개발할 수 있다.
이 기술은 다른 형태의 위치나 크기 등을 촉각적으로 구분할 수 있고 충격 흡수가 가능한 로봇의 피부, 3차원 컴퓨터 인터페이스, 촉각 센서 등에 적용 가능할 것으로 예상된다.
특히 이번 연구는 나노 구조체 및 센서 분야의 전문가인 박인규 교수와 바이오 로봇 분야 전문가인 김정 교수가 공동으로 진행해 실제 제품 적용 가능성이 높다.
김정 교수는 “신축성 촉각 센서는 인체에 바로 부착 가능할 뿐 아니라 다차원 변형상태에 대한 정보를 제공할 수 있다”며 “로봇 피부를 포함한 소프트 로봇 산업 및 착용형 의료기기 분야에 기여할 것이다”고 말했다.
박인규 교수는 “기능성 나노 복합소재와 컴퓨터단층법의 융합을 이용해 차세대 유저인터페이스를 구현한 것이다”고 말했다.
이번 연구는 1저자 이효상 박사과정 외 권동욱, 조지승 연구원과의 공동연구로 진행됐고, 미래창조과학부 이공분야 기초연구사업(중견연구자 지원사업)과 초정밀 광기계기술 연구센터(선도연구센터지원사업)의 지원으로 수행됐다.
□ 그림 설명
그림1. 제작한 촉각 센서와 연결돼 저항에 반응하는 로봇 손
그림2. 실리콘 고무와 카본나노튜브를 이용한 압저항 복합재 제작 과정
그림3. 압저항 복합재를 활용한 컴퓨터 인터페이스
김정, 박인규 교수, 로봇의 피부 역할 할 수 있는 촉각센서 개발
우리 대학 기계공학과 김정, 박인규 교수 공동 연구팀이 실리콘과 탄소 소재를 활용한 로봇의 피부 역할을 할 수 있는 촉각 센서를 개발했다.
이 기술은 충격 흡수가 가능하면서 다양한 형태의 촉감을 구분할 수 있어 향후 로봇의 외피로 이용 가능할 것으로 기대된다.
이효상 박사과정이 1저자로 참여한 이번 연구결과는 네이처 자매지인 ‘사이언티픽 리포트(Scientific Report)’ 1월 25일자 온라인 판에 게재됐다.
피부는 인체에서 가장 많은 부분을 차지하는 기관이며 주요 장기를 외부 충격으로부터 보호하는 동시에 섬세한 촉각 정보를 측정 및 구분해 신경계에 전달하는 역할을 한다.
현재 로봇 감각 기술은 시각, 청각 부분에서는 인간의 능력에 근접하고 있으나 촉각의 경우는 환경의 변화를 온몸으로 감지하는 피부 능력에 비해 많이 부족한 것이 사실이다
인간과 비슷한 기능의 피부를 로봇에게 적용시키기 위해선 높은 신축성을 갖고 충격을 잘 흡수하는 피부 센서 기술의 개발이 필수이다. 전기 배선을 통해 몸 전체에 분포된 많은 센서를 연결하는 기술 또한 해결해야 할 문제이다.
연구팀은 문제 해결을 위해 실리콘과 탄소나노튜브(CNT)를 혼합해 복합재를 만들었고 이를 전기임피던스영상법(EIT)라는 의료 영상 기법과 결합했다. 이를 통해 넓은 영역에 가해지는 다양한 형태의 힘을 전기 배선 없이도 구분할 수 있는 기술을 개발했다.
이를 통해 개발된 로봇 피부는 망치로 내려치는 수준의 강한 충격도 견딜 수 있으며 센서의 일부가 파손돼도 파손 부위에 복합재를 채운 뒤 경화시키면 재사용이 가능하다.
또한 3D 프린터 등으로 만들어진 3차원 형상 틀에 실리콘-나노튜브 복합재를 채워 넣는 방식으로 제작할 수 있다. 기존 2차원 평판 뿐 아니라 다양한 3차원 곡면으로 제작이 가능해 새로운 형태의 컴퓨터 인터페이스도 개발할 수 있다.
이 기술은 다른 형태의 위치나 크기 등을 촉각적으로 구분할 수 있고 충격 흡수가 가능한 로봇의 피부, 3차원 컴퓨터 인터페이스, 촉각 센서 등에 적용 가능할 것으로 예상된다.
특히 이번 연구는 나노 구조체 및 센서 분야의 전문가인 박인규 교수와 바이오 로봇 분야 전문가인 김정 교수가 공동으로 진행해 실제 제품 적용 가능성이 높다.
김정 교수는 “신축성 촉각 센서는 인체에 바로 부착 가능할 뿐 아니라 다차원 변형상태에 대한 정보를 제공할 수 있다”며 “로봇 피부를 포함한 소프트 로봇 산업 및 착용형 의료기기 분야에 기여할 것이다”고 말했다.
박인규 교수는 “기능성 나노 복합소재와 컴퓨터단층법의 융합을 이용해 차세대 유저인터페이스를 구현한 것이다”고 말했다.
이번 연구는 1저자 이효상 박사과정 외 권동욱, 조지승 연구원과의 공동연구로 진행됐고, 미래창조과학부 이공분야 기초연구사업(중견연구자 지원사업)과 초정밀 광기계기술 연구센터(선도연구센터지원사업)의 지원으로 수행됐다.
□ 그림 설명
그림1. 제작한 촉각 센서와 연결돼 저항에 반응하는 로봇 손
그림2. 실리콘 고무와 카본나노튜브를 이용한 압저항 복합재 제작 과정
그림3. 압저항 복합재를 활용한 컴퓨터 인터페이스
2017.02.02
조회수 25589
-
 명현 교수, 해파리 퇴치용 군집 로봇 개발
- 3대의 군집 로봇으로 현장 시연 완료 -
우리 학교 건설 및 환경공학과 명현 교수 연구팀이 해파리 퇴치용 로봇 제로스 (JEROS)를 이용한 협업 군집 로봇 개발을 완료하고 이를 현장에서 시험했다.
최근 우리나라 연근해에 해파리 떼가 출몰하면서 해파리로 인한 인명 사고와 조업 손실(연간 3,000억원 정도 추산됨)이 큰 문제가 되고 있는 가운데, 명현 교수 연구팀은 4년 전 해파리를 제거할 수 있는 무인 자동화 시스템인 ‘제로스’ 개발에 착수했으며, 작년에 1대로 현장 시험을 완료한 바 있다.
올해에는 제로스의 속도 및 퇴치 성능을 향상시키고 3대를 제작하여, 편대를 지으며 협동으로 해파리를 퇴치하는 군집 로봇을 개발, 현장에서 시험을 진행했다.
무인 수상 로봇의 일종인 ‘제로스’는 길이 1.5m, 폭 1m, 높이 1m이고, 폭 1.2m, 높이 1.2m 크기의 분쇄부를 탈부착 가능하다. 원기둥 형태의 두 개의 동체가 부력을 유지하며, 동체에 붙어 있는 두 개의 추진 모터를 이용해서 전・후진 및 회전이 가능하다. 또한 GIS (지리정보시스템) 기반 맵 데이터를 이용하여 해파리 퇴치 작업 영역을 지정하면 작업 경로를 자동으로 계산을 하며 GPS(위성항법장치) 수신기 및 IMU(관성항법장치)를 이용하여 자율 운항을 한다.
군집 로봇은 삼각 편대, 일렬 편대와 같이 정해진 패턴을 유지하는 동시에, 계산된 경로를 따라가며 해파리 퇴치 작업을 수행하게 된다. 이때 선도(리더) 로봇만 주어진 경로를 알면 되고, 다른 로봇들은 무선통신(지그비 방식) 을 이용하여 서로의 위치를 주고 받으며 편대를 유지하게 되므로, 개별적인 제어가 필요하지 않다는 장점이 있다.
제로스는 무인 항법을 통해 스스로 이동하며, 추진 속도를 이용하여 아래에 부착된 분쇄부 쪽으로 해파리가 미끄러져 들어오게 하고, 분쇄부 중앙의 고속 회전하는 프로펠러가 흡입하여 해파리를 완전 분쇄하게 된다.
현장 시험 결과에 따르면, 3대의 군집 로봇이 4노트(시속 7.2km) 의 속도로 진행하였을 때 처리 용량은 시간당 약 900kg인 것으로 나타났다.
연구팀은 현재 경남 마산만에서 보름달물해파리 제거 시험을 완료하였으며, 추후 다양한 장소 및 환경에서 성능 보완을 완료할 예정이다.
군집 제로스 기술은 해파리 제거 외에도 해양 순찰 및 경계, 원유 유출 방지, 부유 쓰레기 제거 등 다양한 목적으로도 활용될 수 있다.
한편, 이번 연구는 미래창조과학부의 ‘신진연구지원사업’ 및 산업통상자원부의 ‘융복합 로봇 전문인력 양성 사업’을 통해 수행됐다.
명현 교수, 해파리 퇴치용 군집 로봇 개발
- 3대의 군집 로봇으로 현장 시연 완료 -
우리 학교 건설 및 환경공학과 명현 교수 연구팀이 해파리 퇴치용 로봇 제로스 (JEROS)를 이용한 협업 군집 로봇 개발을 완료하고 이를 현장에서 시험했다.
최근 우리나라 연근해에 해파리 떼가 출몰하면서 해파리로 인한 인명 사고와 조업 손실(연간 3,000억원 정도 추산됨)이 큰 문제가 되고 있는 가운데, 명현 교수 연구팀은 4년 전 해파리를 제거할 수 있는 무인 자동화 시스템인 ‘제로스’ 개발에 착수했으며, 작년에 1대로 현장 시험을 완료한 바 있다.
올해에는 제로스의 속도 및 퇴치 성능을 향상시키고 3대를 제작하여, 편대를 지으며 협동으로 해파리를 퇴치하는 군집 로봇을 개발, 현장에서 시험을 진행했다.
무인 수상 로봇의 일종인 ‘제로스’는 길이 1.5m, 폭 1m, 높이 1m이고, 폭 1.2m, 높이 1.2m 크기의 분쇄부를 탈부착 가능하다. 원기둥 형태의 두 개의 동체가 부력을 유지하며, 동체에 붙어 있는 두 개의 추진 모터를 이용해서 전・후진 및 회전이 가능하다. 또한 GIS (지리정보시스템) 기반 맵 데이터를 이용하여 해파리 퇴치 작업 영역을 지정하면 작업 경로를 자동으로 계산을 하며 GPS(위성항법장치) 수신기 및 IMU(관성항법장치)를 이용하여 자율 운항을 한다.
군집 로봇은 삼각 편대, 일렬 편대와 같이 정해진 패턴을 유지하는 동시에, 계산된 경로를 따라가며 해파리 퇴치 작업을 수행하게 된다. 이때 선도(리더) 로봇만 주어진 경로를 알면 되고, 다른 로봇들은 무선통신(지그비 방식) 을 이용하여 서로의 위치를 주고 받으며 편대를 유지하게 되므로, 개별적인 제어가 필요하지 않다는 장점이 있다.
제로스는 무인 항법을 통해 스스로 이동하며, 추진 속도를 이용하여 아래에 부착된 분쇄부 쪽으로 해파리가 미끄러져 들어오게 하고, 분쇄부 중앙의 고속 회전하는 프로펠러가 흡입하여 해파리를 완전 분쇄하게 된다.
현장 시험 결과에 따르면, 3대의 군집 로봇이 4노트(시속 7.2km) 의 속도로 진행하였을 때 처리 용량은 시간당 약 900kg인 것으로 나타났다.
연구팀은 현재 경남 마산만에서 보름달물해파리 제거 시험을 완료하였으며, 추후 다양한 장소 및 환경에서 성능 보완을 완료할 예정이다.
군집 제로스 기술은 해파리 제거 외에도 해양 순찰 및 경계, 원유 유출 방지, 부유 쓰레기 제거 등 다양한 목적으로도 활용될 수 있다.
한편, 이번 연구는 미래창조과학부의 ‘신진연구지원사업’ 및 산업통상자원부의 ‘융복합 로봇 전문인력 양성 사업’을 통해 수행됐다.
2013.08.19
조회수 19057
-
 신 개념 두더지 게임로봇 개발
- 이우훈 교수 연구팀, 프랑스에서 열린 세계적 가상현실 및 증강현실 전시회인 ‘라발 버추얼’에서 최고작품상 수상 -
KAIST 연구팀이 만든 신 개념 게임로봇이 세계적인 가상현실 전시회에 국내 작품으론 첫 출품됐음에도 불구하고 대상격인 최고작품상까지 차지, 수상자 명단에 이름을 올려 화제가 되고 있다.
우리 학교 산업디자인학과 이우훈 교수팀이 지난 3월 28일부터 4월 1일까지 프랑스 라발에서 열린 세계적 가상현실 및 증강현실 전시회인 라발 버추얼(Laval Virtual)에서 일명 두더지 게임로봇인 ‘몰봇(MoleBot)’을 출품해 최고작품상을 수상했다.
몰봇은 기존의 컴퓨터 게임과 같은 가상현실 방식과는 다르게 순전히 물리적인 환경에서도 즐길 수 있는 신 개념 게임로봇으로, 인간과 가상세계가 상호작용할 수 있다는 점에서 전시회기간 내내 관람객들로부터 많은 주목을 받았다.
‘몰봇’ 테이블은 약 15,000개의 작은 정육각형 핀들로 구성돼 있는데, 테이블 속에 있는 물체가 움직이면 육각 핀이 미끄러지듯 오르내려 마치 내부에 두더지가 돌아다니는 것처럼 보인다.
특히, 조이스틱을 이용해 조종할 수 있고 테이블 위 물체와 물리적 상호작용을 통해 축구나 미로게임 등 다양한 게임을 즐길 수 있는 게 이 작품의 특징이다.이와 함께, ‘몰봇’은 제스처로도 조종이 가능한데 연구팀은 사람의 손동작을 인식할 수 있도록 ‘몰봇’ 위에 키넥트(Kinect)를 설치했기 때문에 마치 애완동물을 가지고 노는 듯한 게임도 가능하다.
이 교수팀은 ‘테이블 속에 두더지가 산다면...’이라는 다소 황당한 발상을 통해 이 게임로봇을 구상했다.
연구팀은 우선 15,000여개의 육각 핀을 배열해 변형될 수 있는 테이블을 만든 다음, 유선형의 플라스틱 몰드를 핀 아래에 배치하고 그 사이에는 스판덱스(Spandex)라는 고탄력 섬유를 적용해 마찰을 줄임으로써 내부에 두더지가 살아 움직이는 것과 같은 유연한 움직임을 구현하는데 성공했다.
몰드 안에는 자석을 삽입해 내부의 기계적인 움직임을 몰드에 잘 전달될 수 있도록 설계했다. 이후 많은 노력을 거쳐 연구를 시작한지 약 2년 만에 ‘몰봇’을 세상에 선보일 수 있었다.
이우훈 교수는 “가상현실 및 증강현실이라는 공학 분야의 전시회에서 디자인팀이 최고상을 수상하는 것은 극히 이례적인 일”이라며 “작품의 기술적 창의성과 예술적 완성도가 조화를 이뤄 좋은 결과를 낸 것 같다”고 수상소감을 밝혔다.
이 교수는 또 “이번 작품은 테이블 위에 상호작용 가능한 세계를 구축하는 새로운 게임 인터페이스가 될 수 있다”며 “그 동안 디자인의 관점에서 공학과 예술을 접목하려고 노력해왔는데 앞으로 몰봇을 게임은 물론 인간-컴퓨터 상호작용, 건축, 인테리어, 의료 등 다양한 분야에 응용할 계획”이라고 덧붙였다.
올해로 14회 째를 맞은 라발 버추얼은 매년 1만명 이상 참가하는 세계적인 권위를 지닌 전시회로 가상현실과 증강현실분야에서 최첨단 신기술을 선보이는 학회로서도 유명하다.
모두 12개 분야에서 각각 한 작품씩 선정해 상을 주는데 이 교수팀 작품은 분야를 통틀어 이 대회 최고작품상을 수상했다.
관련영상 http://vimeo.com/24155036
그림1. 몰봇
그림2. 몰봇의 내부구조
그림3. 올해 프랑스에서 열린 라발 버추얼에서 어린이들이 몰봇을 가지고 게임하는 모습
신 개념 두더지 게임로봇 개발
- 이우훈 교수 연구팀, 프랑스에서 열린 세계적 가상현실 및 증강현실 전시회인 ‘라발 버추얼’에서 최고작품상 수상 -
KAIST 연구팀이 만든 신 개념 게임로봇이 세계적인 가상현실 전시회에 국내 작품으론 첫 출품됐음에도 불구하고 대상격인 최고작품상까지 차지, 수상자 명단에 이름을 올려 화제가 되고 있다.
우리 학교 산업디자인학과 이우훈 교수팀이 지난 3월 28일부터 4월 1일까지 프랑스 라발에서 열린 세계적 가상현실 및 증강현실 전시회인 라발 버추얼(Laval Virtual)에서 일명 두더지 게임로봇인 ‘몰봇(MoleBot)’을 출품해 최고작품상을 수상했다.
몰봇은 기존의 컴퓨터 게임과 같은 가상현실 방식과는 다르게 순전히 물리적인 환경에서도 즐길 수 있는 신 개념 게임로봇으로, 인간과 가상세계가 상호작용할 수 있다는 점에서 전시회기간 내내 관람객들로부터 많은 주목을 받았다.
‘몰봇’ 테이블은 약 15,000개의 작은 정육각형 핀들로 구성돼 있는데, 테이블 속에 있는 물체가 움직이면 육각 핀이 미끄러지듯 오르내려 마치 내부에 두더지가 돌아다니는 것처럼 보인다.
특히, 조이스틱을 이용해 조종할 수 있고 테이블 위 물체와 물리적 상호작용을 통해 축구나 미로게임 등 다양한 게임을 즐길 수 있는 게 이 작품의 특징이다.이와 함께, ‘몰봇’은 제스처로도 조종이 가능한데 연구팀은 사람의 손동작을 인식할 수 있도록 ‘몰봇’ 위에 키넥트(Kinect)를 설치했기 때문에 마치 애완동물을 가지고 노는 듯한 게임도 가능하다.
이 교수팀은 ‘테이블 속에 두더지가 산다면...’이라는 다소 황당한 발상을 통해 이 게임로봇을 구상했다.
연구팀은 우선 15,000여개의 육각 핀을 배열해 변형될 수 있는 테이블을 만든 다음, 유선형의 플라스틱 몰드를 핀 아래에 배치하고 그 사이에는 스판덱스(Spandex)라는 고탄력 섬유를 적용해 마찰을 줄임으로써 내부에 두더지가 살아 움직이는 것과 같은 유연한 움직임을 구현하는데 성공했다.
몰드 안에는 자석을 삽입해 내부의 기계적인 움직임을 몰드에 잘 전달될 수 있도록 설계했다. 이후 많은 노력을 거쳐 연구를 시작한지 약 2년 만에 ‘몰봇’을 세상에 선보일 수 있었다.
이우훈 교수는 “가상현실 및 증강현실이라는 공학 분야의 전시회에서 디자인팀이 최고상을 수상하는 것은 극히 이례적인 일”이라며 “작품의 기술적 창의성과 예술적 완성도가 조화를 이뤄 좋은 결과를 낸 것 같다”고 수상소감을 밝혔다.
이 교수는 또 “이번 작품은 테이블 위에 상호작용 가능한 세계를 구축하는 새로운 게임 인터페이스가 될 수 있다”며 “그 동안 디자인의 관점에서 공학과 예술을 접목하려고 노력해왔는데 앞으로 몰봇을 게임은 물론 인간-컴퓨터 상호작용, 건축, 인테리어, 의료 등 다양한 분야에 응용할 계획”이라고 덧붙였다.
올해로 14회 째를 맞은 라발 버추얼은 매년 1만명 이상 참가하는 세계적인 권위를 지닌 전시회로 가상현실과 증강현실분야에서 최첨단 신기술을 선보이는 학회로서도 유명하다.
모두 12개 분야에서 각각 한 작품씩 선정해 상을 주는데 이 교수팀 작품은 분야를 통틀어 이 대회 최고작품상을 수상했다.
관련영상 http://vimeo.com/24155036
그림1. 몰봇
그림2. 몰봇의 내부구조
그림3. 올해 프랑스에서 열린 라발 버추얼에서 어린이들이 몰봇을 가지고 게임하는 모습
2012.04.17
조회수 16759
-
 모바일하버, 바다로 나가다
- 파도치는 해상에서 컨테이너 상․하역 시연 성공 -
해상물류의 새로운 장을 펼칠 일명 ‘움직이는 항구’인 모바일하버가 본격적으로 개발을 착수한 지 2년 만에 바다에서 모습을 드러냈다.
우리 학교 모바일하버 사업단은 파도치는 상황에서 선박 간 안전한 도킹 후 컨테이너를 상․하역하는 모바일하버 신기술을 29일 오후 3시 부산 부경대학교 부두 앞 해상에서 성공적으로 선보였다.
모바일하버(Mobile Harbor)는 지난 2009년 ‘대형 화물선이 부두에 접안하지 못하는 경우 하역기능을 가진 선박이 다가가서 화물을 처리하자’라는 역발상에서 시작됐다.
KAIST는 그해 안정화 크레인 기술, 로봇암 자동도킹기술 등 원천기술을 개발하기 시작했고, 12월에는 교내 해양수조에서 축소 모델을 통해 기술의 실현 가능성을 선보였다. 또한, 지난 4월에는 파도치는 바다에서 선박 간 충돌을 방지하면서 두 선박을 신속하고 안정적으로 연결하는 ‘로봇암 자동도킹 시연회’를 성공적으로 마쳤다.
이날 실시된 모바일하버의 성공적인 시연으로 KAIST가 지난 2009년부터 미래성장동력사업으로 야심차게 추진해 온 모바일하버의 상용화 가능성과 안정성·신뢰성이 확보됐다.
아울러 원천기술을 대형 기계시스템으로 구현했다는 점에서 높은 평가를 받았다. 이와 함께 개발된 기술의 상용화에 탄력이 붙을 것으로 기대된다.
곽병만 모바일하버사업단장은 “항만을 신설하거나 증설하지 않고 컨테이너를 수송할 수 있는 국내 독자 기술인 모바일하버에 국내외에서 많은 관심을 갖고 지켜보고 있는 것으로 알고 있다”며 “기대에 부응해 모바일하버가 여러 분야에 파급될 수 있도록 지속적인 노력을 하겠다”고 말했다.
한편, 이날 공개시연회에는 국내외 대학 및 연구기관 전문가, 조선․해양 민간기업 관계자뿐만 아니라 사업 협력이 추진되고 있는 해외 인사들이 대거 참관해 모바일하버 기술에 큰 관심을 나타내기도 했다.
대덕넷 기사 : 모두가 "안된다" 했던 "움직이는 항구" 끝내 바다에 뜨다
모바일하버, 바다로 나가다
- 파도치는 해상에서 컨테이너 상․하역 시연 성공 -
해상물류의 새로운 장을 펼칠 일명 ‘움직이는 항구’인 모바일하버가 본격적으로 개발을 착수한 지 2년 만에 바다에서 모습을 드러냈다.
우리 학교 모바일하버 사업단은 파도치는 상황에서 선박 간 안전한 도킹 후 컨테이너를 상․하역하는 모바일하버 신기술을 29일 오후 3시 부산 부경대학교 부두 앞 해상에서 성공적으로 선보였다.
모바일하버(Mobile Harbor)는 지난 2009년 ‘대형 화물선이 부두에 접안하지 못하는 경우 하역기능을 가진 선박이 다가가서 화물을 처리하자’라는 역발상에서 시작됐다.
KAIST는 그해 안정화 크레인 기술, 로봇암 자동도킹기술 등 원천기술을 개발하기 시작했고, 12월에는 교내 해양수조에서 축소 모델을 통해 기술의 실현 가능성을 선보였다. 또한, 지난 4월에는 파도치는 바다에서 선박 간 충돌을 방지하면서 두 선박을 신속하고 안정적으로 연결하는 ‘로봇암 자동도킹 시연회’를 성공적으로 마쳤다.
이날 실시된 모바일하버의 성공적인 시연으로 KAIST가 지난 2009년부터 미래성장동력사업으로 야심차게 추진해 온 모바일하버의 상용화 가능성과 안정성·신뢰성이 확보됐다.
아울러 원천기술을 대형 기계시스템으로 구현했다는 점에서 높은 평가를 받았다. 이와 함께 개발된 기술의 상용화에 탄력이 붙을 것으로 기대된다.
곽병만 모바일하버사업단장은 “항만을 신설하거나 증설하지 않고 컨테이너를 수송할 수 있는 국내 독자 기술인 모바일하버에 국내외에서 많은 관심을 갖고 지켜보고 있는 것으로 알고 있다”며 “기대에 부응해 모바일하버가 여러 분야에 파급될 수 있도록 지속적인 노력을 하겠다”고 말했다.
한편, 이날 공개시연회에는 국내외 대학 및 연구기관 전문가, 조선․해양 민간기업 관계자뿐만 아니라 사업 협력이 추진되고 있는 해외 인사들이 대거 참관해 모바일하버 기술에 큰 관심을 나타내기도 했다.
대덕넷 기사 : 모두가 "안된다" 했던 "움직이는 항구" 끝내 바다에 뜨다
2011.06.29
조회수 15275