-
 온도에 반응해 말랑·딱딱 변하는 전자잉크 나왔다
스마트폰 같은 딱딱한 전자기기는 안정적인 성능을 제공하지만 착용시 불편함을 주는 반면, 얇고 유연한 웨어러블 기기는 착용감은 뛰어나지만 부드러운 특성 때문에 정밀한 조작에 한계가 있다. 국내 연구진이 온도에 따라 딱딱함과 부드러움을 자유자재로 전환할 수 있는‘액체금속 전자잉크’를 개발해, 가변강성을 갖춘 전자기기의 새로운 패러다임을 열고 있다.
우리 대학 전기및전자공학부 정재웅 교수 연구팀이 서울대 박성준 교수 연구팀, 우리 대학 신소재공학과 스티브 박 교수 연구팀과 공동연구를 통해, 상온에서 마이크로 스케일(머리카락보다 얇은 구조)의 미세 선폭 회로 인쇄가 가능하고 온도에 따라 딱딱함과 부드러움을 자유자재로 조절할 수 있는 액체금속 전자잉크를 개발했다고 4일 밝혔다.
연구팀이 개발한 전자잉크는 정밀한 인쇄가 가능한 물성과 우수한 전기전도성을 동시에 갖추고 있으며, 딱딱함과 부드러움을 자유자재로 조절할 수 있는 전자소자를 상온에서 정밀 제작할 수 있는 획기적인 기술이다.
이 전자잉크는 상용 인쇄회로 기판(PCB) 수준의 복잡한 고해상도 다층 회로 인쇄가 가능하며, 완성된 전자기기는 온도에 반응해 딱딱한 형태를 유연하게 변화시킬 수 있다.
연구팀은 기존 전자기기의 고정된 형태의 한계를 극복하기 위해 체온 근처(29.8 ℃)에서 녹는 액체금속 갈륨에 주목했다. 갈륨은 고체 상태에서는 매우 단단하지만 녹으면 부드러운 액체가 돼 큰 폭의 강성 변화가 가능하다. 하지만 기존 갈륨은 물방울처럼 뭉치려는 성질(높은 표면장력)과 액체 상태에서의 불안정성 때문에 정밀한 회로 제작이 어려웠고, 제조 과정에서 원치 않는 상변화가 일어나는 문제가 있었다.
이러한 갈륨의 한계를 극복하기 위해 산성도(pH) 제어 기반 액체금속 전자 잉크 프린팅 기술을 개발했다.
먼저, 마이크로 크기의 갈륨 입자를 디메틸 설폭사이드(Dimethyl Sulfoxide, 이하 DMSO)라는 중성 용매에 친수성 폴리우레탄 고분자와 함께 섞어 전자 잉크를 제작했다. 이때 DMSO 용매의 중성 상태 덕분에 갈륨 입자들이 고분자 매트릭스에 골고루 분산된 안정적인 고점성 잉크가 형성되며, 이를 통해 상온에서 고해상도 회로 인쇄가 가능해진다.
그리고 인쇄 후에는 가열 과정에서 DMSO 용매가 분해되면서 산성 물질을 생성하고, 이 산성 환경에서 갈륨 입자들 표면의 산화막이 제거돼 입자들이 물리적으로 연결되면서 전기가 통하고 강성을 조절할 수 있는 회로가 형성된다.
연구팀은 이러한 2단계 공정을 통해 상온에서는 안정적인 인쇄가 가능하면서도 완성 후에는 우수한 전기전도성과 가변강성 특성을 갖는 전자소자를 구현할 수 있었다.
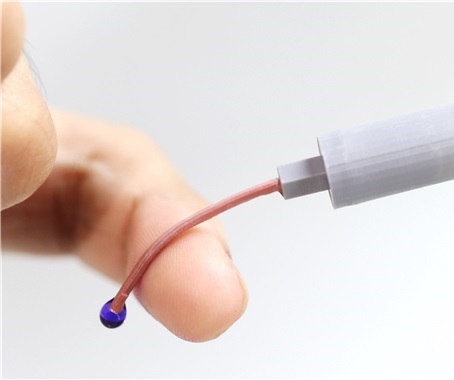
개발된 전자잉크는 머리카락 굵기의 절반 (약 50μm)인 미세 선폭으로 정밀한 회로를 인쇄할 수 있으며, 우수한 전기전도도(2.27×10⁶ S/m)와 함께 1,465배나 되는 강성 조절 비율을 제공한다. 이는 플라스틱처럼 딱딱한 상태에서 고무처럼 말랑한 상태까지 자유자재로 변할 수 있음을 뜻한다.
또한 스크린 프린팅, 딥 코팅 등 기존 인쇄 방법들과 호환돼 고해상 대면적 회로 제작은 물론 복잡한 3차원 형태의 다양한 전자기기 제작을 가능하게 한다.
연구팀은 이 기술을 활용해 평상시에는 딱딱한 휴대용 전자기기로 사용하다가 몸에 착용하면 부드러운 웨어러블 헬스케어 기기로 변환되는 가변형 다목적 기기를 개발했다. 뿐만 아니라, 수술 시에는 딱딱한 상태로 정밀한 조작과 뇌 삽입이 가능하지만 뇌 조직 내에서는 부드럽게 변해 조직 내 염증반응을 최소화하는 뇌 탐침을 구현함으로써 이식용 소자로서의 활용 가능성도 입증했다.
정재웅 교수는 “전자 잉크 용매의 산성도 조절을 통해 갈륨 입자들을 전기·기계적 연결하는 독창적 기술로 액체금속 프린팅의 고질적인 문제를 해결하고 상온에서 초정밀 고해상 회로 제작을 가능하게 한 것이 이번 연구의 핵심”이라며 “하나의 기기가 상황에 따라 딱딱한 상태와 부드러운 상태로 자유자재로 변환될 수 있어 다목적 전자기기, 의료 기술, 로봇 분야 등에서 다양한 응용이 가능할 것”이라고 말했다.
전기및전자공학부 이시목 박사과정 학생과 부산대 이건희 교수가 공동 제1 저자로 참여한 이번 연구는 국제 학술지 ‘사이언스 어드밴시스(Science Advances)’에 5월 30일 字에 게재됐다.
(논문명 : Phase-Change Metal Ink with pH-Controlled Chemical Sintering for Versatile and Scalable Fabrication of Variable Stiffness Electronics, DOI/10.1126/sciadv.adv4921)
한편 이번 연구는 과학기술정보통신부에서 추진하는 한국연구재단 중견연구지원사업, 기초연구실지원사업, 보스턴-코리아 공동연구 프로젝트, BK21 FOUR 사업의 지원을 받아 수행됐다.
온도에 반응해 말랑·딱딱 변하는 전자잉크 나왔다
스마트폰 같은 딱딱한 전자기기는 안정적인 성능을 제공하지만 착용시 불편함을 주는 반면, 얇고 유연한 웨어러블 기기는 착용감은 뛰어나지만 부드러운 특성 때문에 정밀한 조작에 한계가 있다. 국내 연구진이 온도에 따라 딱딱함과 부드러움을 자유자재로 전환할 수 있는‘액체금속 전자잉크’를 개발해, 가변강성을 갖춘 전자기기의 새로운 패러다임을 열고 있다.
우리 대학 전기및전자공학부 정재웅 교수 연구팀이 서울대 박성준 교수 연구팀, 우리 대학 신소재공학과 스티브 박 교수 연구팀과 공동연구를 통해, 상온에서 마이크로 스케일(머리카락보다 얇은 구조)의 미세 선폭 회로 인쇄가 가능하고 온도에 따라 딱딱함과 부드러움을 자유자재로 조절할 수 있는 액체금속 전자잉크를 개발했다고 4일 밝혔다.
연구팀이 개발한 전자잉크는 정밀한 인쇄가 가능한 물성과 우수한 전기전도성을 동시에 갖추고 있으며, 딱딱함과 부드러움을 자유자재로 조절할 수 있는 전자소자를 상온에서 정밀 제작할 수 있는 획기적인 기술이다.
이 전자잉크는 상용 인쇄회로 기판(PCB) 수준의 복잡한 고해상도 다층 회로 인쇄가 가능하며, 완성된 전자기기는 온도에 반응해 딱딱한 형태를 유연하게 변화시킬 수 있다.
연구팀은 기존 전자기기의 고정된 형태의 한계를 극복하기 위해 체온 근처(29.8 ℃)에서 녹는 액체금속 갈륨에 주목했다. 갈륨은 고체 상태에서는 매우 단단하지만 녹으면 부드러운 액체가 돼 큰 폭의 강성 변화가 가능하다. 하지만 기존 갈륨은 물방울처럼 뭉치려는 성질(높은 표면장력)과 액체 상태에서의 불안정성 때문에 정밀한 회로 제작이 어려웠고, 제조 과정에서 원치 않는 상변화가 일어나는 문제가 있었다.
이러한 갈륨의 한계를 극복하기 위해 산성도(pH) 제어 기반 액체금속 전자 잉크 프린팅 기술을 개발했다.
먼저, 마이크로 크기의 갈륨 입자를 디메틸 설폭사이드(Dimethyl Sulfoxide, 이하 DMSO)라는 중성 용매에 친수성 폴리우레탄 고분자와 함께 섞어 전자 잉크를 제작했다. 이때 DMSO 용매의 중성 상태 덕분에 갈륨 입자들이 고분자 매트릭스에 골고루 분산된 안정적인 고점성 잉크가 형성되며, 이를 통해 상온에서 고해상도 회로 인쇄가 가능해진다.
그리고 인쇄 후에는 가열 과정에서 DMSO 용매가 분해되면서 산성 물질을 생성하고, 이 산성 환경에서 갈륨 입자들 표면의 산화막이 제거돼 입자들이 물리적으로 연결되면서 전기가 통하고 강성을 조절할 수 있는 회로가 형성된다.
연구팀은 이러한 2단계 공정을 통해 상온에서는 안정적인 인쇄가 가능하면서도 완성 후에는 우수한 전기전도성과 가변강성 특성을 갖는 전자소자를 구현할 수 있었다.
개발된 전자잉크는 머리카락 굵기의 절반 (약 50μm)인 미세 선폭으로 정밀한 회로를 인쇄할 수 있으며, 우수한 전기전도도(2.27×10⁶ S/m)와 함께 1,465배나 되는 강성 조절 비율을 제공한다. 이는 플라스틱처럼 딱딱한 상태에서 고무처럼 말랑한 상태까지 자유자재로 변할 수 있음을 뜻한다.
또한 스크린 프린팅, 딥 코팅 등 기존 인쇄 방법들과 호환돼 고해상 대면적 회로 제작은 물론 복잡한 3차원 형태의 다양한 전자기기 제작을 가능하게 한다.
연구팀은 이 기술을 활용해 평상시에는 딱딱한 휴대용 전자기기로 사용하다가 몸에 착용하면 부드러운 웨어러블 헬스케어 기기로 변환되는 가변형 다목적 기기를 개발했다. 뿐만 아니라, 수술 시에는 딱딱한 상태로 정밀한 조작과 뇌 삽입이 가능하지만 뇌 조직 내에서는 부드럽게 변해 조직 내 염증반응을 최소화하는 뇌 탐침을 구현함으로써 이식용 소자로서의 활용 가능성도 입증했다.
정재웅 교수는 “전자 잉크 용매의 산성도 조절을 통해 갈륨 입자들을 전기·기계적 연결하는 독창적 기술로 액체금속 프린팅의 고질적인 문제를 해결하고 상온에서 초정밀 고해상 회로 제작을 가능하게 한 것이 이번 연구의 핵심”이라며 “하나의 기기가 상황에 따라 딱딱한 상태와 부드러운 상태로 자유자재로 변환될 수 있어 다목적 전자기기, 의료 기술, 로봇 분야 등에서 다양한 응용이 가능할 것”이라고 말했다.
전기및전자공학부 이시목 박사과정 학생과 부산대 이건희 교수가 공동 제1 저자로 참여한 이번 연구는 국제 학술지 ‘사이언스 어드밴시스(Science Advances)’에 5월 30일 字에 게재됐다.
(논문명 : Phase-Change Metal Ink with pH-Controlled Chemical Sintering for Versatile and Scalable Fabrication of Variable Stiffness Electronics, DOI/10.1126/sciadv.adv4921)
한편 이번 연구는 과학기술정보통신부에서 추진하는 한국연구재단 중견연구지원사업, 기초연구실지원사업, 보스턴-코리아 공동연구 프로젝트, BK21 FOUR 사업의 지원을 받아 수행됐다.
2025.06.04
조회수 2273
-
 체온으로 부드러워지는 전자잉크 최초 개발
차세대 웨어러블 및 임플란터블 기기, 의료기기, 로보틱스 등 다양한 분야에 활용될 체온에 따라 부드럽게 변할 수 있는 전자잉크를 최초로 개발하였다.
우리 대학은 전기및전자공학부 정재웅 교수 연구팀이 신소재공학과 스티브박 교수 연구팀과 공동연구를 통해 작은 노즐을 통한 직접 잉크 쓰기 방식으로 고해상도 프린팅이 가능하고 체온에 의해 부드러워져 인체 친화적 바이오 전자소자 구현을 가능하게 하는 액체금속 기반 전자잉크를 최초로 개발했다고 6일 밝혔다.
최근 웨어러블 및 임플란터블 생체 소자와 소프트 로보틱스 분야에서는 부드러운 사람 피부나 조직에 적용돼 건강 상태를 모니터링하고 질환을 치료하는 기술이 활발히 연구되고 있다. 기존 의료기기 예를 들어보면, 딱딱한 형태의 의료기기인 경우 부드러운 피부와의 강성도 차이로 인해 피부 부착 시 불편함을 야기하거나 조직 삽입 시 염증 반응을 유발할 수 있다.
반면, 피부처럼 부드러운 유연한 의료기기는 피부나 조직에 적용 시 우리 몸의 일부처럼 이질감 없이 사용될 수 있지만, 부드러운 특성으로 인해 정교한 핸들링을 어렵게 한다.
연구팀은 이러한 고정된 강성을 갖는 기존 바이오 전자기기의 한계를 극복하기 위해, 상온에서는 단단하여 손쉬운 핸들링으로 인체 적용을 용이하게 하고, 피부 부착 또는 조직 내 이식 후에는 체온에 의해 부드럽게 변하여 조직의 일부처럼 함께 움직일 수 있는 전자 회로 제작을 가능하게 하는, 고해상도 패터닝이 가능한 액체금속 갈륨 기반 전자잉크를 개발했다.
이 전자 잉크의 핵심 소재인 갈륨은 금속임에도 불구하고 미온(29.76 ℃)에서 녹는 점을 가져 쉽게 고체와 액체 간의 상태 변화가 가능하고 뛰어난 전기전도성과 무독성을 가진다. 연구팀은 또한 기존 갈륨의 높은 표면장력과 낮은 점도 문제를 해결함으로써, 고해상도 프린팅이 가능한 전자잉크를 구현했다.
개발된 잉크는 상용회로도선 정도의 딱딱한 상태와 피부조직처럼 부드러운 상태 간의 뛰어난 가변 강성률, 빠른 강성 변화, 높은 열전도율, 그리고 우수한 전기전도성을 가진다. 이 전자잉크는 3D 프린팅을 활용해 사용자 맞춤형 전자소자 제작도 가능하게 한다.
연구팀은 이 기술을 통해 초박막 광 혈류측정 전자 피부센서와 무선 광전자 임플란트 장치를 제작했다. 이 기기들은 상온(25℃)에서는 딱딱하여 다루기 쉬운 반면, 체온(~36.7℃)에 노출되면 부드럽게 변환돼 피부나 조직에 적용 시 기계적 스트레스를 주지 않고 조직 변형에 순응하며 안정적으로 동작하는 게 가능하다. 사용 후 인체에서 제거 시 다시 딱딱한 형태로 변형될 수 있어 재사용을 용이하게 한다. 위와 같은 특성은 다양한 웨어러블 및 임플란터블 장치에 폭넓게 활용될 수 있을 것으로 기대된다.
정재웅 교수는 "체온에 반응해 강성을 변환할 수 있고 고해상도 프린팅이 가능한 전자잉크는 기계적 특성 변환을 필요로 하는 다목적 전자기기, 센서, 로봇 기술뿐만 아니라 의료 기기 분야에서 고정된 형태를 갖는 기존 전자기기의 한계를 극복해 다양한 새로운 가능성을 열 수 있을 것ˮ이라고 말했다.
우리 대학 신소재공학부 권도아 학사과정과 전기및전자공학부 이시목 박사과정 학생이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 어드밴시스(Science Advances)'에 2월 28일 字에 게재됐다. (논문명 : Body-temperature Softening Electronic Ink for Additive Manufacturing of Transformative Bioelectronics via Direct Writing)
한편 이번 연구는 과학기술정보통신부에서 추진하는 한국연구재단 전자약 기술개발사업, 기초연구실 지원사업, 중견연구자 지원사업, 한국전자통신연구원 개방형융합선행연구의 지원을 받아 수행됐다.
체온으로 부드러워지는 전자잉크 최초 개발
차세대 웨어러블 및 임플란터블 기기, 의료기기, 로보틱스 등 다양한 분야에 활용될 체온에 따라 부드럽게 변할 수 있는 전자잉크를 최초로 개발하였다.
우리 대학은 전기및전자공학부 정재웅 교수 연구팀이 신소재공학과 스티브박 교수 연구팀과 공동연구를 통해 작은 노즐을 통한 직접 잉크 쓰기 방식으로 고해상도 프린팅이 가능하고 체온에 의해 부드러워져 인체 친화적 바이오 전자소자 구현을 가능하게 하는 액체금속 기반 전자잉크를 최초로 개발했다고 6일 밝혔다.
최근 웨어러블 및 임플란터블 생체 소자와 소프트 로보틱스 분야에서는 부드러운 사람 피부나 조직에 적용돼 건강 상태를 모니터링하고 질환을 치료하는 기술이 활발히 연구되고 있다. 기존 의료기기 예를 들어보면, 딱딱한 형태의 의료기기인 경우 부드러운 피부와의 강성도 차이로 인해 피부 부착 시 불편함을 야기하거나 조직 삽입 시 염증 반응을 유발할 수 있다.
반면, 피부처럼 부드러운 유연한 의료기기는 피부나 조직에 적용 시 우리 몸의 일부처럼 이질감 없이 사용될 수 있지만, 부드러운 특성으로 인해 정교한 핸들링을 어렵게 한다.
연구팀은 이러한 고정된 강성을 갖는 기존 바이오 전자기기의 한계를 극복하기 위해, 상온에서는 단단하여 손쉬운 핸들링으로 인체 적용을 용이하게 하고, 피부 부착 또는 조직 내 이식 후에는 체온에 의해 부드럽게 변하여 조직의 일부처럼 함께 움직일 수 있는 전자 회로 제작을 가능하게 하는, 고해상도 패터닝이 가능한 액체금속 갈륨 기반 전자잉크를 개발했다.
이 전자 잉크의 핵심 소재인 갈륨은 금속임에도 불구하고 미온(29.76 ℃)에서 녹는 점을 가져 쉽게 고체와 액체 간의 상태 변화가 가능하고 뛰어난 전기전도성과 무독성을 가진다. 연구팀은 또한 기존 갈륨의 높은 표면장력과 낮은 점도 문제를 해결함으로써, 고해상도 프린팅이 가능한 전자잉크를 구현했다.
개발된 잉크는 상용회로도선 정도의 딱딱한 상태와 피부조직처럼 부드러운 상태 간의 뛰어난 가변 강성률, 빠른 강성 변화, 높은 열전도율, 그리고 우수한 전기전도성을 가진다. 이 전자잉크는 3D 프린팅을 활용해 사용자 맞춤형 전자소자 제작도 가능하게 한다.
연구팀은 이 기술을 통해 초박막 광 혈류측정 전자 피부센서와 무선 광전자 임플란트 장치를 제작했다. 이 기기들은 상온(25℃)에서는 딱딱하여 다루기 쉬운 반면, 체온(~36.7℃)에 노출되면 부드럽게 변환돼 피부나 조직에 적용 시 기계적 스트레스를 주지 않고 조직 변형에 순응하며 안정적으로 동작하는 게 가능하다. 사용 후 인체에서 제거 시 다시 딱딱한 형태로 변형될 수 있어 재사용을 용이하게 한다. 위와 같은 특성은 다양한 웨어러블 및 임플란터블 장치에 폭넓게 활용될 수 있을 것으로 기대된다.
정재웅 교수는 "체온에 반응해 강성을 변환할 수 있고 고해상도 프린팅이 가능한 전자잉크는 기계적 특성 변환을 필요로 하는 다목적 전자기기, 센서, 로봇 기술뿐만 아니라 의료 기기 분야에서 고정된 형태를 갖는 기존 전자기기의 한계를 극복해 다양한 새로운 가능성을 열 수 있을 것ˮ이라고 말했다.
우리 대학 신소재공학부 권도아 학사과정과 전기및전자공학부 이시목 박사과정 학생이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `사이언스 어드밴시스(Science Advances)'에 2월 28일 字에 게재됐다. (논문명 : Body-temperature Softening Electronic Ink for Additive Manufacturing of Transformative Bioelectronics via Direct Writing)
한편 이번 연구는 과학기술정보통신부에서 추진하는 한국연구재단 전자약 기술개발사업, 기초연구실 지원사업, 중견연구자 지원사업, 한국전자통신연구원 개방형융합선행연구의 지원을 받아 수행됐다.
2024.03.06
조회수 8962
-
 부드러워져 재사용 불가능한 주사바늘 개발
정맥주사는 혈관에 약물을 직접 주입하는 방법으로 신속한 효과를 유도하고 지속적인 약물 투여를 통한 치료가 가능해 범세계적으로 환자치료에 통용되고 있다. 하지만 금속이나 플라스틱 등 딱딱한 소재로 제작된 주사바늘은 부드러운 생체조직에 손상과 염증을 발생시킬 수 있다. 또한 비용 절감을 위한 비윤리적 주사바늘 재사용을 가능하게 하며, 이는 인체면역 결핍 바이러스(HIV), B형/C형 간염 바이러스 등 심각한 혈액 매개 질환 감염을 초래하기도 한다. 이는 전 세계적인 문제이며, 감염관리의 중요성으로 인해 세계보건기구(WHO)는 재사용이 불가능한 스마트 주사기 개발과 사용을 장려하고 있다.
우리 대학 전기및전자공학부 정재웅 교수 연구팀이 의과학대학원 정원일 교수 연구팀과 공동 연구를 통해 환자 건강증진 및 의료진 안전을 도모할 수 있는 가변 강성 정맥 주사바늘을 개발하는 데 성공했다고 13일 밝혔다.
이번에 개발된 기술은 체온에 의해 주사바늘이 유연해지는 특성을 통해 정맥에 약물 주입 중 주사 삽입 부위의 자유로운 움직임을 보장함과 동시에 주사바늘에 의한 혈관 벽 손상 방지를 도모할 수 있을 것으로 예상된다. 또한 사용 후 찔림 사고나 비윤리적 주사기 재사용에 따른 혈액 매개 질환 감염 문제를 예방할 수 있을 것이라 기대된다.
전기및전자공학부 카렌-크리스티안 아그노(Karen-Christian Agno) 박사과정 연구원과 의과학대학원 양경모 박사가 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `네이처 바이오메디컬 엔지니어링(Nature Biomedical Engineering)' 10월 30일 字에 게재됐다. (논문명 : A temperature-responsive intravenous needle that irreversibly softens on insertion)
연구팀은 액체금속의 일종인 갈륨(Gallium)을 이용하여 주사바늘 구조를 만들고 이를 생체적합성 폴리머로 코팅해 가변 강성 정맥 주사바늘을 제작했다. 딱딱한 상태의 주사바늘은 상용 정맥 카테터와 비슷한 수준의 생체조직 관통력을 갖는다. 하지만 체내 삽입 후, 갈륨의 액체화로 인해 조직과 같이 부드러운 상태로 변해 혈관 손상 없이 안정적인 약물 전달이 가능하다. 한 번 사용한 주사바늘은 갈륨의 과냉각 현상에 의해 상온에서도 부드러운 상태를 유지해 바늘 찔림 사고나 재사용 문제를 원천적으로 방지할 수 있다.
연구팀은 개발된 정맥 주사바늘의 약물 전달 기능과 생체적합성을 검증하고자 실험 쥐를 대상으로 동물실험을 진행했다. 이식된 가변 강성 정맥 주사바늘은 딱딱한 상용 금속 바늘이나 플라스틱 카테터에 비해 훨씬 낮은 염증 반응을 보여 연구팀은 우수한 생체적합성을 확인했다. 또한 상용 주사바늘과 같이 안정적으로 약물을 전달할 수 있음을 확인했다.
아울러 가변 강성 정맥 주사바늘은 박막형 온도 센서를 탑재할 수 있도록 디자인됐다. 이를 통해 실시간으로 환자의 심부체온을 모니터링하는 것이 가능하며, 또한 잘못된 주사바늘 위치로 인한 혈관이 아닌 다른 조직으로의 약물 누수 감지도 가능해 환자에게 더 나은 의료서비스를 제공할 수 있다.
이번 연구를 주도한 정재웅 교수는 "개발된 가변 강성 정맥 주사바늘은 기존의 딱딱한 의료용 바늘로 인한 문제를 극복해 환자와 의료진 모두의 안전을 보장하고, 주사바늘 재사용으로 인한 감염 문제를 해결할 수 있다는 점에서 가치가 매우 크다”라고 말했다.
한편 이번 연구는 한국연구재단이 추진하는 중견연구자지원사업, 생체신호센서융합기술개발사업, 리더연구자지원사업의 지원을 받아 수행됐다.
부드러워져 재사용 불가능한 주사바늘 개발
정맥주사는 혈관에 약물을 직접 주입하는 방법으로 신속한 효과를 유도하고 지속적인 약물 투여를 통한 치료가 가능해 범세계적으로 환자치료에 통용되고 있다. 하지만 금속이나 플라스틱 등 딱딱한 소재로 제작된 주사바늘은 부드러운 생체조직에 손상과 염증을 발생시킬 수 있다. 또한 비용 절감을 위한 비윤리적 주사바늘 재사용을 가능하게 하며, 이는 인체면역 결핍 바이러스(HIV), B형/C형 간염 바이러스 등 심각한 혈액 매개 질환 감염을 초래하기도 한다. 이는 전 세계적인 문제이며, 감염관리의 중요성으로 인해 세계보건기구(WHO)는 재사용이 불가능한 스마트 주사기 개발과 사용을 장려하고 있다.
우리 대학 전기및전자공학부 정재웅 교수 연구팀이 의과학대학원 정원일 교수 연구팀과 공동 연구를 통해 환자 건강증진 및 의료진 안전을 도모할 수 있는 가변 강성 정맥 주사바늘을 개발하는 데 성공했다고 13일 밝혔다.
이번에 개발된 기술은 체온에 의해 주사바늘이 유연해지는 특성을 통해 정맥에 약물 주입 중 주사 삽입 부위의 자유로운 움직임을 보장함과 동시에 주사바늘에 의한 혈관 벽 손상 방지를 도모할 수 있을 것으로 예상된다. 또한 사용 후 찔림 사고나 비윤리적 주사기 재사용에 따른 혈액 매개 질환 감염 문제를 예방할 수 있을 것이라 기대된다.
전기및전자공학부 카렌-크리스티안 아그노(Karen-Christian Agno) 박사과정 연구원과 의과학대학원 양경모 박사가 공동 제1 저자로 참여한 이번 연구는 국제 학술지 `네이처 바이오메디컬 엔지니어링(Nature Biomedical Engineering)' 10월 30일 字에 게재됐다. (논문명 : A temperature-responsive intravenous needle that irreversibly softens on insertion)
연구팀은 액체금속의 일종인 갈륨(Gallium)을 이용하여 주사바늘 구조를 만들고 이를 생체적합성 폴리머로 코팅해 가변 강성 정맥 주사바늘을 제작했다. 딱딱한 상태의 주사바늘은 상용 정맥 카테터와 비슷한 수준의 생체조직 관통력을 갖는다. 하지만 체내 삽입 후, 갈륨의 액체화로 인해 조직과 같이 부드러운 상태로 변해 혈관 손상 없이 안정적인 약물 전달이 가능하다. 한 번 사용한 주사바늘은 갈륨의 과냉각 현상에 의해 상온에서도 부드러운 상태를 유지해 바늘 찔림 사고나 재사용 문제를 원천적으로 방지할 수 있다.
연구팀은 개발된 정맥 주사바늘의 약물 전달 기능과 생체적합성을 검증하고자 실험 쥐를 대상으로 동물실험을 진행했다. 이식된 가변 강성 정맥 주사바늘은 딱딱한 상용 금속 바늘이나 플라스틱 카테터에 비해 훨씬 낮은 염증 반응을 보여 연구팀은 우수한 생체적합성을 확인했다. 또한 상용 주사바늘과 같이 안정적으로 약물을 전달할 수 있음을 확인했다.
아울러 가변 강성 정맥 주사바늘은 박막형 온도 센서를 탑재할 수 있도록 디자인됐다. 이를 통해 실시간으로 환자의 심부체온을 모니터링하는 것이 가능하며, 또한 잘못된 주사바늘 위치로 인한 혈관이 아닌 다른 조직으로의 약물 누수 감지도 가능해 환자에게 더 나은 의료서비스를 제공할 수 있다.
이번 연구를 주도한 정재웅 교수는 "개발된 가변 강성 정맥 주사바늘은 기존의 딱딱한 의료용 바늘로 인한 문제를 극복해 환자와 의료진 모두의 안전을 보장하고, 주사바늘 재사용으로 인한 감염 문제를 해결할 수 있다는 점에서 가치가 매우 크다”라고 말했다.
한편 이번 연구는 한국연구재단이 추진하는 중견연구자지원사업, 생체신호센서융합기술개발사업, 리더연구자지원사업의 지원을 받아 수행됐다.
2023.11.13
조회수 11500
-
 국내 최초로 ACM UIST서 최우수논문상 수상
우리 대학 산업디자인학과 안드리아 비앙키(Andrea Bianchi) 교수 연구팀이 지난달 23일 온라인으로 개최된 인간-컴퓨터 상호작용 분야 최우수 국제학술대회인 `ACM UIST 2020(The ACM Symposium on User Interface Software & Technology)'에서 상위 1%에게 주어지는 `최우수논문상(Best Paper Award)'을 수상했다고 18일 밝혔다.
ACM UIST에서 우리나라 주관기관이 최우수논문상을 수상한 것은 이번이 처음이다. 컨트롤러의 휨 강성을 실시간으로 조절해 가상 환경에서 사용자가 손으로 쥐고 움직이는 가상 물체를 사실적으로 체험할 수 있는 VR(가상현실) 컨트롤러인 `엘라스틱(ElaStick)'을 개발한 공로를 인정받았기 때문이다. (논문명 : ElaStick: A Handheld Variable Stiffness Display for Rendering Dynamic Haptic Response of Flexible Object)
이번 연구에는 산업디자인학과 유능 석사과정 학생이 제1 저자로 참여했다. 기존의 VR 컨트롤러 연구는 손에 쥐고 있는 가상 물체의 무게, 모양, 움직임을 표현하는 데에만 집중돼있어 사용자가 가상 물체를 쥐고 휘두를 때 발생하는 진동이나 갑작스럽게 움직임을 멈출 때 생기는 반동 등을 재현하는 데 많은 제약이 따랐다.
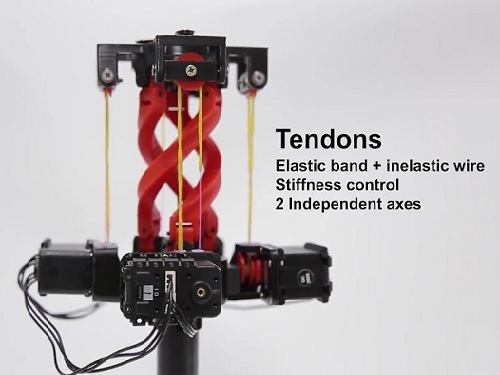
이 같은 문제점을 해결하고 높은 수준의 동역학적 반응을 제공하기 위해서는 물체의 모양, 크기, 재질과 관련된 물체의 강성을 고려해야 한다. 연구팀이 개발한 `엘라스틱(ElaStick)'은 모든 방향으로 자유롭게 휘어지는 구조물에 4개의 케이블을 연결하고, 각 케이블의 물질 조성을 조절해 전체 컨트롤러의 휨 강성 조절이 가능하다. 따라서 이 기술을 적용해 가상 환경에서 실시간으로 다양한 모양 및 크기를 가지는 가상 물체의 사실적인 일루젼(illusion)을 구현하는 데 성공했다.
연구팀은 엘라스틱(ElaStick)을 활용해 강성 변화에 따른 사용자들의 인지능력을 측정하는 한편 가상 물체를 재현했을 때 VR 경험의 사실감과 몰입감 그리고 즐거움이 크게 향상되는 것을 실험적으로 확인했다.
안드리아 교수는 "미국 MIT, 마이크로소프트, 독일 막스 플랑크 연구소 등 저명한 대학과 기관이 수상한 바 있는 UIST 최우수논문상을 국내 최초로 수상하게 돼 매우 기쁘다ˮ고 말했다. 그는 또 "엘라스틱(ElaStick)은 향후 원격 로봇수술, 의료수술, 게임 등 다양한 가상 환경에서 실용적이면서도 상업적 활용 가치를 기대할 수 있다ˮ고 덧붙였다.
한편, 이번 `ACM UIST 2020'에서 KAIST 산업디자인학과는 안드리아 교수팀의 최우수논문상 수상 외에도 남택진 교수 연구팀이 `어너러블멘션(Honorable Mention)' 논문상을 받았다.
남택진 산업디자인학과장은 "총 7개의 논문상 중 국내 최초의 최우수논문상 수상과 어너러블멘션 논문상의 동시 수상은 KAIST 산업디자인학과의 위상과 연구 우수성을 입증한 결과ˮ라고 강조했다.
관련 유튜브 영상: https://youtu.be/jfIsgFb6hTY
국내 최초로 ACM UIST서 최우수논문상 수상
우리 대학 산업디자인학과 안드리아 비앙키(Andrea Bianchi) 교수 연구팀이 지난달 23일 온라인으로 개최된 인간-컴퓨터 상호작용 분야 최우수 국제학술대회인 `ACM UIST 2020(The ACM Symposium on User Interface Software & Technology)'에서 상위 1%에게 주어지는 `최우수논문상(Best Paper Award)'을 수상했다고 18일 밝혔다.
ACM UIST에서 우리나라 주관기관이 최우수논문상을 수상한 것은 이번이 처음이다. 컨트롤러의 휨 강성을 실시간으로 조절해 가상 환경에서 사용자가 손으로 쥐고 움직이는 가상 물체를 사실적으로 체험할 수 있는 VR(가상현실) 컨트롤러인 `엘라스틱(ElaStick)'을 개발한 공로를 인정받았기 때문이다. (논문명 : ElaStick: A Handheld Variable Stiffness Display for Rendering Dynamic Haptic Response of Flexible Object)
이번 연구에는 산업디자인학과 유능 석사과정 학생이 제1 저자로 참여했다. 기존의 VR 컨트롤러 연구는 손에 쥐고 있는 가상 물체의 무게, 모양, 움직임을 표현하는 데에만 집중돼있어 사용자가 가상 물체를 쥐고 휘두를 때 발생하는 진동이나 갑작스럽게 움직임을 멈출 때 생기는 반동 등을 재현하는 데 많은 제약이 따랐다.
이 같은 문제점을 해결하고 높은 수준의 동역학적 반응을 제공하기 위해서는 물체의 모양, 크기, 재질과 관련된 물체의 강성을 고려해야 한다. 연구팀이 개발한 `엘라스틱(ElaStick)'은 모든 방향으로 자유롭게 휘어지는 구조물에 4개의 케이블을 연결하고, 각 케이블의 물질 조성을 조절해 전체 컨트롤러의 휨 강성 조절이 가능하다. 따라서 이 기술을 적용해 가상 환경에서 실시간으로 다양한 모양 및 크기를 가지는 가상 물체의 사실적인 일루젼(illusion)을 구현하는 데 성공했다.
연구팀은 엘라스틱(ElaStick)을 활용해 강성 변화에 따른 사용자들의 인지능력을 측정하는 한편 가상 물체를 재현했을 때 VR 경험의 사실감과 몰입감 그리고 즐거움이 크게 향상되는 것을 실험적으로 확인했다.
안드리아 교수는 "미국 MIT, 마이크로소프트, 독일 막스 플랑크 연구소 등 저명한 대학과 기관이 수상한 바 있는 UIST 최우수논문상을 국내 최초로 수상하게 돼 매우 기쁘다ˮ고 말했다. 그는 또 "엘라스틱(ElaStick)은 향후 원격 로봇수술, 의료수술, 게임 등 다양한 가상 환경에서 실용적이면서도 상업적 활용 가치를 기대할 수 있다ˮ고 덧붙였다.
한편, 이번 `ACM UIST 2020'에서 KAIST 산업디자인학과는 안드리아 교수팀의 최우수논문상 수상 외에도 남택진 교수 연구팀이 `어너러블멘션(Honorable Mention)' 논문상을 받았다.
남택진 산업디자인학과장은 "총 7개의 논문상 중 국내 최초의 최우수논문상 수상과 어너러블멘션 논문상의 동시 수상은 KAIST 산업디자인학과의 위상과 연구 우수성을 입증한 결과ˮ라고 강조했다.
관련 유튜브 영상: https://youtu.be/jfIsgFb6hTY
2020.11.20
조회수 33447
-
 한국형 휴머노이드 로봇 휴보(HUBO) 개발
기계공학과 오준호(吳俊鎬, 50) 교수팀은 지난 3년여의 연구기간에 걸쳐 국내 최초로 이족보행이 가능한 완전한 외양을 갖춘 2족 보행 로봇을 개발하고 그 사진을 공개했다.
연구책임자: 오준호 교수
연구진 : 김정엽(박사과정 4년), 박일우(박사과정 3년), 이정호(박사과정 3년), 김민수(박사과정 1년), 조백규(박사과정 1년)
새로이 선보인 휴머노이드로봇 휴보는 2003년도에 개발된 KHR-2의 성능을 업그레이드 한 모델로 몸 전체의 기계적 강성을 증가 시켜 보다 안정된 보행을 가능하게 하였고 상체 관절의 구동방식을 개선하여 더욱 부드러운 동작이 가능하게 하였다.
HUBO는 현재 0~32cm보폭으로 최대 시속 1.25km/h 전진보행한다. 좌/우 옆걸음, 뒤걸음, 좌/우 회전 걸음, 다양한 몸동작, 독립적인 5개의 손가락 운동, 독립적인 양 안구 운동, 손목의 힘/모멘트 센서를 통한 외력감지 등이 가능하며 이를 통하여 자유걸음새, 외력에 따라 움직이는 팔동작, 외부 안내에 따라 자유롭게 걷는 걸음, 비젼을 통한 실시간 목표 추적, 음성 인식 및 합성을 통한 대화 등을 수행한다. 아직 달리기(주행)과 층계오르기 등의 걸음새는 구현 되지 않았으나 추후 연구를 실시할 예정이다.
KHR 시리즈를 구현함에 있어 가능한 많은 구동자유도, 가능한 긴 작동시간, 콤팩트하고 미려한 외관(예: 백팩의 제거), 저렴한 개발비 및 최소의 유지비, 최단의 개발기간을 목표로 하였다.
이를 위하여 구동감속부, 힘/모멘트 센서, 관성센서, 서보 드라이버, 분산제어기, 실시간 제어 아키텍쳐 등 요소 기술을 자체 설계하여 구현함으로써 설계를 최적화 하도록 하였다. 또한 간결한 구조물설계를 통하여 기계적 강성을 얻었으며 기구학적 불확실성을 최소화 하였다.
연구개발과정을 표로 보면 아래와 같다.
기간
지원기관
예산
KHR-1
2002.1 - 2002.12
BK21, HWRS ERC
0.8억
KHR-2
2003.1 - 2003. 12
BK21, 기관고유사업
1.7억
KHR-3(HUBO)
2004.1 - 2004. 12
BK21, 산업자원부
5.5억
특징
KHR-1
21축, 중앙집중제어 방식,
머리와 손 부분이 없는 보행 기능위주의 구조 키 130cm, 무게:45Kg
KHR-2
41축, 분산제어방식(CAN 통신)
실시간 window xp - RTX
power 300w, 키:125cm, 무게 55kg, 비젼 기능
부분적 커버를 갖는 외양
보행속도: 25cm, 65회/분 = 0.95km/h 연속작동시간: 45분/1회충전
KHR-3(HUBO)
KHR-2의 업그레이드된 기구 및 기능
- 음성합성 및 인식기능
- 몸체의 기계적 강성 증가
- 상체 관절의 구동 메카니즘 개선
- 완벽한 enclosure 형 와관 구현
- 32cm 보행+ 65회/분 = 1.25Km/h - 연속작동: 90분 /1회충전
향후계획:
- 층계오르기 구현, - 보행속도 향상, - 달리기 구현
- 자유걸음새 구현, - 인간과 상호작용능력 개선 - 다양한 대중 performance 시연
한편, 휴보 개발의 기대 효과를 살펴보면,
- 환상을 현실에서 구현할 수 있다는 비젼을 제시,
- 국내의 기술력으로 휴머노이드 로봇을 개발함으로써 기술력을 대 내외에 과시하여 국민적 자긍심을 고취,
- 관련 첨단기술(구동기, 감속기, 2차전지, 각종센서, 제어기, 시스템기술)의 국산화를 통한 기술 spin off 효과 - 관련기술 최 선진국인 일본과 가시적인 경쟁을 통한 국가 기술위상확립 등을 들 수 있다.
한국형 휴머노이드 로봇 휴보(HUBO) 개발
기계공학과 오준호(吳俊鎬, 50) 교수팀은 지난 3년여의 연구기간에 걸쳐 국내 최초로 이족보행이 가능한 완전한 외양을 갖춘 2족 보행 로봇을 개발하고 그 사진을 공개했다.
연구책임자: 오준호 교수
연구진 : 김정엽(박사과정 4년), 박일우(박사과정 3년), 이정호(박사과정 3년), 김민수(박사과정 1년), 조백규(박사과정 1년)
새로이 선보인 휴머노이드로봇 휴보는 2003년도에 개발된 KHR-2의 성능을 업그레이드 한 모델로 몸 전체의 기계적 강성을 증가 시켜 보다 안정된 보행을 가능하게 하였고 상체 관절의 구동방식을 개선하여 더욱 부드러운 동작이 가능하게 하였다.
HUBO는 현재 0~32cm보폭으로 최대 시속 1.25km/h 전진보행한다. 좌/우 옆걸음, 뒤걸음, 좌/우 회전 걸음, 다양한 몸동작, 독립적인 5개의 손가락 운동, 독립적인 양 안구 운동, 손목의 힘/모멘트 센서를 통한 외력감지 등이 가능하며 이를 통하여 자유걸음새, 외력에 따라 움직이는 팔동작, 외부 안내에 따라 자유롭게 걷는 걸음, 비젼을 통한 실시간 목표 추적, 음성 인식 및 합성을 통한 대화 등을 수행한다. 아직 달리기(주행)과 층계오르기 등의 걸음새는 구현 되지 않았으나 추후 연구를 실시할 예정이다.
KHR 시리즈를 구현함에 있어 가능한 많은 구동자유도, 가능한 긴 작동시간, 콤팩트하고 미려한 외관(예: 백팩의 제거), 저렴한 개발비 및 최소의 유지비, 최단의 개발기간을 목표로 하였다.
이를 위하여 구동감속부, 힘/모멘트 센서, 관성센서, 서보 드라이버, 분산제어기, 실시간 제어 아키텍쳐 등 요소 기술을 자체 설계하여 구현함으로써 설계를 최적화 하도록 하였다. 또한 간결한 구조물설계를 통하여 기계적 강성을 얻었으며 기구학적 불확실성을 최소화 하였다.
연구개발과정을 표로 보면 아래와 같다.
기간
지원기관
예산
KHR-1
2002.1 - 2002.12
BK21, HWRS ERC
0.8억
KHR-2
2003.1 - 2003. 12
BK21, 기관고유사업
1.7억
KHR-3(HUBO)
2004.1 - 2004. 12
BK21, 산업자원부
5.5억
특징
KHR-1
21축, 중앙집중제어 방식,
머리와 손 부분이 없는 보행 기능위주의 구조 키 130cm, 무게:45Kg
KHR-2
41축, 분산제어방식(CAN 통신)
실시간 window xp - RTX
power 300w, 키:125cm, 무게 55kg, 비젼 기능
부분적 커버를 갖는 외양
보행속도: 25cm, 65회/분 = 0.95km/h 연속작동시간: 45분/1회충전
KHR-3(HUBO)
KHR-2의 업그레이드된 기구 및 기능
- 음성합성 및 인식기능
- 몸체의 기계적 강성 증가
- 상체 관절의 구동 메카니즘 개선
- 완벽한 enclosure 형 와관 구현
- 32cm 보행+ 65회/분 = 1.25Km/h - 연속작동: 90분 /1회충전
향후계획:
- 층계오르기 구현, - 보행속도 향상, - 달리기 구현
- 자유걸음새 구현, - 인간과 상호작용능력 개선 - 다양한 대중 performance 시연
한편, 휴보 개발의 기대 효과를 살펴보면,
- 환상을 현실에서 구현할 수 있다는 비젼을 제시,
- 국내의 기술력으로 휴머노이드 로봇을 개발함으로써 기술력을 대 내외에 과시하여 국민적 자긍심을 고취,
- 관련 첨단기술(구동기, 감속기, 2차전지, 각종센서, 제어기, 시스템기술)의 국산화를 통한 기술 spin off 효과 - 관련기술 최 선진국인 일본과 가시적인 경쟁을 통한 국가 기술위상확립 등을 들 수 있다.
2004.12.27
조회수 27891