%EB%87%8C+%ED%94%BC%EC%A7%88
-
 노화된 뇌막 속 쌓인 당이 장애 유발 최초 규명
평균연령 증가로 인해 심각한 뇌 질환을 동반하지 않은 일반적인 노화로 인한 뇌의 변화에 관한 연구 역시 필요한 추세다. 노화 연구와 관련하여 노화가 진행될수록 몸속에 ‘당’이 축적되고 이렇게 축적된 당은 노화-연관 염증, 혈관질환 등 다양한 질환의 원인 물질이 된다. 결국‘남아도는 당 분자’는 몸속 다양한 단백질에 붙어 단백질의 기능을 방해한다.
우리 대학 바이오및뇌공학과 김필남 교수, 정용 교수 공동연구팀이 뇌를 감싸고 있는 뇌막(혹은 뇌수막; brain meninges)이 노화에 따른 `당' 축적이 되면서 뇌 피질을 감싸고 있는 ‘최전선 방어벽'으로의 기능에 장애가 일어남을 확인했다고 15일 밝혔다.
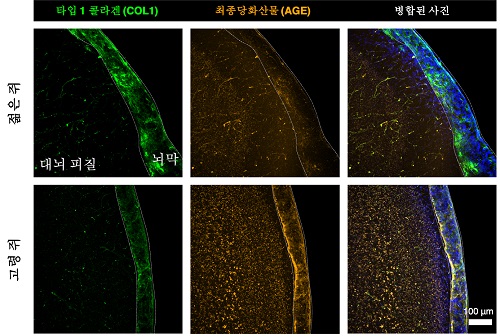
김 교수 연구팀은 고령자의 뇌막에서 당 분자의 과도한 축적을 확인하고, 생쥐 모델에서도 나이에 따른 당의 축적이 이뤄짐을 확인하였다. 뇌막은 뇌를 감싸고 있는 얇은 막으로 뇌척수액과 피질의 경계에 존재하며 뇌를 보호하는 중요한 기능을 하고 있다. 이번 연구에서는 이러한 뇌막이 노화로 인해 생기는 기능이상이 뇌 속 ‘남아도는’ 당에 의해서 유도됨을 밝혔다. 특히, 노화에 의해서 뇌막이 얇아지고 끈적해지면서 뇌척수액과 뇌피질과의 물질교환이 감소하는 것에 대한 원리 규명에 새로운 패러다임을 제공하게 되었다.
이번 연구는 KAIST 바이오및뇌공학과 김효민 박사과정 학생과 김신흔 박사가 공동 제1 저자로 참여해 국제 학술지 `노화하는 세포(Aging Cell)'에 지난 2월 28일 자 온라인판으로 게재됐다. (논문명: Glycation mediated tissue level remodeling of brain meningeal membrane by aging)
뇌척수액과 직접 맞닿아 있는 뇌막은 주로 콜라겐 (collagen)이라는 세포외기질 (Extracellular Matrix, ECM) 단백질로 구성되어 있으며 이 단백질을 생산하는 세포인 섬유아세포 (fibroblast) 로 이루어져 있다. 당이 흡착된 콜라겐 단백질과 부착된 세포는 콜라겐의 생산기능이 떨어지는 반면, 콜라겐의 분해 효소의 발현이 높아지면서 뇌막은 지속적으로 얇아지고 붕괴된다.
지속적인 당 섭취로 인해서 초과된 당 분자가 뇌에 쌓이면서 신경세포의 변성과 뇌 질환 간의 연구는 지속적으로 진행되어 왔다. 하지만 뇌를 감싸고 있는 뇌막 자체에 초점을 두어 당 축적으로 인한 뇌막 변성 및 기능 장애를 확인한 것은 이번 연구에서 최초로 제시되었으며, 이는 뇌 질환 연구에서의 새로운 치료접근을 제시할 것을 기대할 수 있다.
제1 저자인 김효민 연구원은 “인간의 뇌에서 시작해서 생체모사 뇌막 모델과 동물모델을 활용한 융합적 접근으로 노화로 인한 뇌 장벽 변화에 대해 규명한 흥미로운 연구ˮ 라고 연구 결과를 소개했다.
김필남 교수 연구팀은 이러한 뇌막을 비롯한 인체 전반적으로 쌓이는 당을 제거하기 위한 연구개발을 진행하고 있다. 인체에서 단백질과 당이 만나서 형성되는 찌꺼기인 최종당화산물(Advanced glycation end product)는 대식세포에 의해서 일부 제거된다. 하지만, 콜라겐과 같은 세포외기질 단백질과 결합한 당화산물은 자연적으로는 제거되기 어렵다. 본 연구진은 KAIST-세라젬 연구센터를 통해서 ‘몸 속 당 찌꺼기’ 제거를 위한 헬스케어 의료기기를 개발하고 있다.
이번 연구는 한국연구재단 집단연구지원을 받아 수행됐다.
2023.03.15 조회수 7773
노화된 뇌막 속 쌓인 당이 장애 유발 최초 규명
평균연령 증가로 인해 심각한 뇌 질환을 동반하지 않은 일반적인 노화로 인한 뇌의 변화에 관한 연구 역시 필요한 추세다. 노화 연구와 관련하여 노화가 진행될수록 몸속에 ‘당’이 축적되고 이렇게 축적된 당은 노화-연관 염증, 혈관질환 등 다양한 질환의 원인 물질이 된다. 결국‘남아도는 당 분자’는 몸속 다양한 단백질에 붙어 단백질의 기능을 방해한다.
우리 대학 바이오및뇌공학과 김필남 교수, 정용 교수 공동연구팀이 뇌를 감싸고 있는 뇌막(혹은 뇌수막; brain meninges)이 노화에 따른 `당' 축적이 되면서 뇌 피질을 감싸고 있는 ‘최전선 방어벽'으로의 기능에 장애가 일어남을 확인했다고 15일 밝혔다.
김 교수 연구팀은 고령자의 뇌막에서 당 분자의 과도한 축적을 확인하고, 생쥐 모델에서도 나이에 따른 당의 축적이 이뤄짐을 확인하였다. 뇌막은 뇌를 감싸고 있는 얇은 막으로 뇌척수액과 피질의 경계에 존재하며 뇌를 보호하는 중요한 기능을 하고 있다. 이번 연구에서는 이러한 뇌막이 노화로 인해 생기는 기능이상이 뇌 속 ‘남아도는’ 당에 의해서 유도됨을 밝혔다. 특히, 노화에 의해서 뇌막이 얇아지고 끈적해지면서 뇌척수액과 뇌피질과의 물질교환이 감소하는 것에 대한 원리 규명에 새로운 패러다임을 제공하게 되었다.
이번 연구는 KAIST 바이오및뇌공학과 김효민 박사과정 학생과 김신흔 박사가 공동 제1 저자로 참여해 국제 학술지 `노화하는 세포(Aging Cell)'에 지난 2월 28일 자 온라인판으로 게재됐다. (논문명: Glycation mediated tissue level remodeling of brain meningeal membrane by aging)
뇌척수액과 직접 맞닿아 있는 뇌막은 주로 콜라겐 (collagen)이라는 세포외기질 (Extracellular Matrix, ECM) 단백질로 구성되어 있으며 이 단백질을 생산하는 세포인 섬유아세포 (fibroblast) 로 이루어져 있다. 당이 흡착된 콜라겐 단백질과 부착된 세포는 콜라겐의 생산기능이 떨어지는 반면, 콜라겐의 분해 효소의 발현이 높아지면서 뇌막은 지속적으로 얇아지고 붕괴된다.
지속적인 당 섭취로 인해서 초과된 당 분자가 뇌에 쌓이면서 신경세포의 변성과 뇌 질환 간의 연구는 지속적으로 진행되어 왔다. 하지만 뇌를 감싸고 있는 뇌막 자체에 초점을 두어 당 축적으로 인한 뇌막 변성 및 기능 장애를 확인한 것은 이번 연구에서 최초로 제시되었으며, 이는 뇌 질환 연구에서의 새로운 치료접근을 제시할 것을 기대할 수 있다.
제1 저자인 김효민 연구원은 “인간의 뇌에서 시작해서 생체모사 뇌막 모델과 동물모델을 활용한 융합적 접근으로 노화로 인한 뇌 장벽 변화에 대해 규명한 흥미로운 연구ˮ 라고 연구 결과를 소개했다.
김필남 교수 연구팀은 이러한 뇌막을 비롯한 인체 전반적으로 쌓이는 당을 제거하기 위한 연구개발을 진행하고 있다. 인체에서 단백질과 당이 만나서 형성되는 찌꺼기인 최종당화산물(Advanced glycation end product)는 대식세포에 의해서 일부 제거된다. 하지만, 콜라겐과 같은 세포외기질 단백질과 결합한 당화산물은 자연적으로는 제거되기 어렵다. 본 연구진은 KAIST-세라젬 연구센터를 통해서 ‘몸 속 당 찌꺼기’ 제거를 위한 헬스케어 의료기기를 개발하고 있다.
이번 연구는 한국연구재단 집단연구지원을 받아 수행됐다.
2023.03.15 조회수 7773 -
 상상만으로 원하는 방향으로 사용가능한 로봇 팔 뇌-기계 인터페이스 개발
우리 대학 뇌인지과학과 정재승 교수 연구팀이 인간의 뇌 신호를 해독해 장기간의 훈련 없이 생각만으로 로봇 팔을 원하는 방향으로 제어하는 뇌-기계 인터페이스 시스템을 개발했다고 24일 밝혔다.
서울의대 신경외과 정천기 교수 연구팀과 공동연구로 진행된 이번 연구에서 정 교수 연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다. 이러한 디코딩 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않기 때문에 운동장애를 겪는 환자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇 팔을 제어할 수 있어 앞으로 다양한 의료기기에 폭넓게 적용되리라 기대된다.
바이오및뇌공학과 장상진 박사과정이 제1 저자로 참여한 이번 연구는 뇌공학 분야의 세계적인 국제 학술지 `저널 오브 뉴럴 엔지니어링 (Journal of Neural Engineering)' 9월 19권 5호에 출판됐다. (논문명 : Decoding trajectories of imagined hand movement using electrocorticograms for brain-machine interface).
뇌-기계 인터페이스는 인간이 생각만으로 기계를 제어할 수 있는 기술로, 팔을 움직이는 데 장애가 있거나 절단된 환자가 로봇 팔을 제어해 일상에 필요한 팔 동작을 회복할 수 있는 보조기술로 크게 주목받고 있다.
로봇 팔 제어를 위한 뇌-기계 인터페이스를 구현하기 위해서는 인간이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고 기계학습 등 다양한 인공지능 분석기법으로 뇌 신호를 해독해 의도한 움직임을 뇌 신호로부터 예측할 수 있는 디코딩 기술이 필요하다.
그러나 상지 절단 등으로 운동장애를 겪는 환자는 팔을 실제로 움직이기 어려우므로, 상상만으로 로봇 팔의 방향을 지시할 수 있는 인터페이스가 절실히 요구된다. 뇌 신호 디코딩 기술은 팔의 실제 움직임이 아닌 상상 뇌 신호에서 어느 방향으로 사용자가 상상했는지 예측할 수 있어야 하는데, 상상 뇌 신호는 실제 움직임 뇌 신호보다 신호대잡음비(signal to noise ratio)가 현저히 낮아 팔의 정확한 방향을 예측하기 어려운 문제점이 오랫동안 난제였다. 이러한 문제점을 극복하고자 기존 연구들에서는 팔을 움직이기 위해 신호대잡음비가 더 높은 다른 신체 동작을 상상하는 방법을 시도했으나, 의도하고자 하는 팔 뻗기와 인지적 동작 간의 부자연스러운 괴리로 인해 사용자가 장기간 훈련해야 하는 불편함을 초래했다.
따라서 팔을 뻗는 상상을 할 때 어느 방향으로 뻗었는지 예측하는 디코딩 기술은 정확도가 떨어지고 환자가 사용법을 습득하기 어려운 문제점이 있다. 이 문제가 오랫동안 뇌-기계 인터페이스 분야에서 해결해야 할 난제였다.
연구팀은 문제 해결을 위해 사용자의 자연스러운 팔 동작 상상을 공간해상도가 우수한 대뇌 피질 신호(electrocorticogram)로 측정하고, 변분 베이지안 최소제곱(variational Bayesian least square) 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산할 수 있는 디코딩 기술을 처음으로 개발했다.
연구팀의 팔 동작 상상 신호 분석기술은 운동피질을 비롯한 특정 대뇌 영역에 국한되지 않아, 사용자마다 상이할 수 있는 상상 신호와 대뇌 영역 특성을 맞춤형으로 학습해 최적의 계산모델 파라미터 결괏값을 출력할 수 있다.
연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있음을 확인했다.
나아가 계산모델을 분석함으로써 방향 상상에 중요한 대뇌의 시공간적 특성을 밝혔고, 상상하는 인지적 과정이 팔을 실제로 뻗는 과정에 근접할수록 방향 예측정확도가 상당히 더 높아질 수 있음을 연구팀은 확인했다.
연구팀은 지난 2월 인공지능과 유전자 알고리즘 기반 고 정확도 로봇 팔 제어 뇌-기계 인터페이스 선행 연구 결과를 세계적인 학술지 `어플라이드 소프트 컴퓨팅(Applied soft computing)'에 발표한 바 있다. 이번 후속 연구는 그에 기반해 계산 알고리즘 간소화, 로봇 팔 구동 테스트, 환자의 상상 전략 개선 등 실전에 근접한 사용환경을 조성해 실제로 로봇 팔을 구동하고 의도한 방향으로 로봇 팔이 이동하는지 테스트를 진행했고, 네 가지 방향에 대한 의도를 읽어 정확하게 목표물에 도달하는 시연에 성공했다.
연구팀이 개발한 팔 동작 방향 상상 뇌 신호 분석기술은 향후 사지마비 환자를 비롯한 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 향상, 효율성 개선 등에 이바지할 수 있을 것으로 기대된다.
연구책임자 정재승 교수는 "장애인마다 상이한 뇌 신호를 맞춤형으로 분석해 장기간 훈련을 받지 않더라도 로봇 팔을 제어할 수 있는 기술은 혁신적인 결과이며, 이번 기술은 향후 의수를 대신할 로봇팔을 상용화하는 데에도 크게 기여할 것으로 기대된다ˮ고 말했다.
2022.10.24 조회수 10981
상상만으로 원하는 방향으로 사용가능한 로봇 팔 뇌-기계 인터페이스 개발
우리 대학 뇌인지과학과 정재승 교수 연구팀이 인간의 뇌 신호를 해독해 장기간의 훈련 없이 생각만으로 로봇 팔을 원하는 방향으로 제어하는 뇌-기계 인터페이스 시스템을 개발했다고 24일 밝혔다.
서울의대 신경외과 정천기 교수 연구팀과 공동연구로 진행된 이번 연구에서 정 교수 연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다. 이러한 디코딩 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않기 때문에 운동장애를 겪는 환자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇 팔을 제어할 수 있어 앞으로 다양한 의료기기에 폭넓게 적용되리라 기대된다.
바이오및뇌공학과 장상진 박사과정이 제1 저자로 참여한 이번 연구는 뇌공학 분야의 세계적인 국제 학술지 `저널 오브 뉴럴 엔지니어링 (Journal of Neural Engineering)' 9월 19권 5호에 출판됐다. (논문명 : Decoding trajectories of imagined hand movement using electrocorticograms for brain-machine interface).
뇌-기계 인터페이스는 인간이 생각만으로 기계를 제어할 수 있는 기술로, 팔을 움직이는 데 장애가 있거나 절단된 환자가 로봇 팔을 제어해 일상에 필요한 팔 동작을 회복할 수 있는 보조기술로 크게 주목받고 있다.
로봇 팔 제어를 위한 뇌-기계 인터페이스를 구현하기 위해서는 인간이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고 기계학습 등 다양한 인공지능 분석기법으로 뇌 신호를 해독해 의도한 움직임을 뇌 신호로부터 예측할 수 있는 디코딩 기술이 필요하다.
그러나 상지 절단 등으로 운동장애를 겪는 환자는 팔을 실제로 움직이기 어려우므로, 상상만으로 로봇 팔의 방향을 지시할 수 있는 인터페이스가 절실히 요구된다. 뇌 신호 디코딩 기술은 팔의 실제 움직임이 아닌 상상 뇌 신호에서 어느 방향으로 사용자가 상상했는지 예측할 수 있어야 하는데, 상상 뇌 신호는 실제 움직임 뇌 신호보다 신호대잡음비(signal to noise ratio)가 현저히 낮아 팔의 정확한 방향을 예측하기 어려운 문제점이 오랫동안 난제였다. 이러한 문제점을 극복하고자 기존 연구들에서는 팔을 움직이기 위해 신호대잡음비가 더 높은 다른 신체 동작을 상상하는 방법을 시도했으나, 의도하고자 하는 팔 뻗기와 인지적 동작 간의 부자연스러운 괴리로 인해 사용자가 장기간 훈련해야 하는 불편함을 초래했다.
따라서 팔을 뻗는 상상을 할 때 어느 방향으로 뻗었는지 예측하는 디코딩 기술은 정확도가 떨어지고 환자가 사용법을 습득하기 어려운 문제점이 있다. 이 문제가 오랫동안 뇌-기계 인터페이스 분야에서 해결해야 할 난제였다.
연구팀은 문제 해결을 위해 사용자의 자연스러운 팔 동작 상상을 공간해상도가 우수한 대뇌 피질 신호(electrocorticogram)로 측정하고, 변분 베이지안 최소제곱(variational Bayesian least square) 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산할 수 있는 디코딩 기술을 처음으로 개발했다.
연구팀의 팔 동작 상상 신호 분석기술은 운동피질을 비롯한 특정 대뇌 영역에 국한되지 않아, 사용자마다 상이할 수 있는 상상 신호와 대뇌 영역 특성을 맞춤형으로 학습해 최적의 계산모델 파라미터 결괏값을 출력할 수 있다.
연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있음을 확인했다.
나아가 계산모델을 분석함으로써 방향 상상에 중요한 대뇌의 시공간적 특성을 밝혔고, 상상하는 인지적 과정이 팔을 실제로 뻗는 과정에 근접할수록 방향 예측정확도가 상당히 더 높아질 수 있음을 연구팀은 확인했다.
연구팀은 지난 2월 인공지능과 유전자 알고리즘 기반 고 정확도 로봇 팔 제어 뇌-기계 인터페이스 선행 연구 결과를 세계적인 학술지 `어플라이드 소프트 컴퓨팅(Applied soft computing)'에 발표한 바 있다. 이번 후속 연구는 그에 기반해 계산 알고리즘 간소화, 로봇 팔 구동 테스트, 환자의 상상 전략 개선 등 실전에 근접한 사용환경을 조성해 실제로 로봇 팔을 구동하고 의도한 방향으로 로봇 팔이 이동하는지 테스트를 진행했고, 네 가지 방향에 대한 의도를 읽어 정확하게 목표물에 도달하는 시연에 성공했다.
연구팀이 개발한 팔 동작 방향 상상 뇌 신호 분석기술은 향후 사지마비 환자를 비롯한 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 향상, 효율성 개선 등에 이바지할 수 있을 것으로 기대된다.
연구책임자 정재승 교수는 "장애인마다 상이한 뇌 신호를 맞춤형으로 분석해 장기간 훈련을 받지 않더라도 로봇 팔을 제어할 수 있는 기술은 혁신적인 결과이며, 이번 기술은 향후 의수를 대신할 로봇팔을 상용화하는 데에도 크게 기여할 것으로 기대된다ˮ고 말했다.
2022.10.24 조회수 10981