%EC%9D%B8%ED%84%B0%ED%8E%98%EC%9D%B4%EC%8A%A4
-
 경기욱 교수 연구팀, 3차원으로 변하는 모핑 구동기 개발
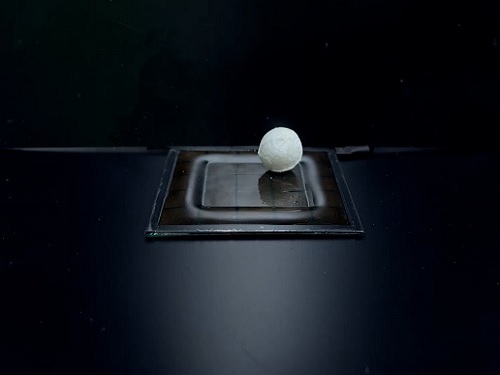
우리 대학 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발했다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 최근 연구팀은 전기 활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
연구팀의 모핑 구동기는 전기유압식 구동(electrohydraulic actuation) 원리를 이용한다. 전극과 PVC 젤 복합체 사이에 전기장을 가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑(electrostatic zipping)이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 유체의 흐름을 제어할 수 있으며, 이를 통해 다양한 형상을 표현할 수 있다.
연구팀이 개발한 모핑 구동기는 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 표면에서 고속으로 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이번 연구 결과는 국제학술지 ‘사이언스 어드밴시스(Science Advances)’Vol.10(39)에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator)
또한 본 연구는 지난 8월 한국햅틱스학술대회에서 최우수논문상을 수상했다. 한편 본 연구는 국가과학기술연구회(CRC23021-000), 삼성미래기술육성재단(SRFC-IT2102-04), 한국전자통신연구원(24YB1700)의 지원으로 수행됐다.
2024.09.30 조회수 5407
경기욱 교수 연구팀, 3차원으로 변하는 모핑 구동기 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 다양한 3차원 형상으로 빠르게 변화하는 모핑 구동기를 개발했다.
현대 기술은 2차원 화면을 넘어 3차원 형상을 통해 정보를 전달하는 새로운 방식을 탐구하고 있다. 그러나 3차원 형상을 빠르게 표현하고 재구성하는 것은 도전적인 과제이다. 이에 대한 해답으로, 최근 연구팀은 전기 활성 고분자의 일종인 PVC 젤, 유전성 유체, 패턴화된 전극으로 구성된 새로운 모핑 구동기를 선보였다.
연구팀의 모핑 구동기는 전기유압식 구동(electrohydraulic actuation) 원리를 이용한다. 전극과 PVC 젤 복합체 사이에 전기장을 가하면 PVC 젤 복합체가 전극에 달라붙는 정전기적 지핑(electrostatic zipping)이 발생한다. 정전기적 지핑을 국부적으로 제어함으로써 유체의 흐름을 제어할 수 있으며, 이를 통해 다양한 형상을 표현할 수 있다.
연구팀이 개발한 모핑 구동기는 1.5 mm의 얇은 두께와, 7 g의 가벼운 무게를 가지면서도 최대 2.5 mm의 수직 변위와 2.0 N의 힘을 출력할 수 있으며, 약 0.045 초 만에 형상을 표현할 수 있다. 또한 기존의 모핑 구동기가 제공할 수 없었던 풍부한 햅틱 피드백을 제공하며, 모양 변화 특성을 활용하여 표면에서 고속으로 물체를 이동시킬 수 있다.
해당 연구는 모핑 구동기의 개발을 통해 사람과 기술이 상호작용하는 새로운 방식을 제안하였으며, 이는 차세대 디스플레이 및 로보틱 인터페이스 등 다양한 방식으로 활용될 것으로 기대된다.
장승연 박사과정 학생이 제1 저자로 참여하고 ETRI와 공동으로 진행한 이번 연구 결과는 국제학술지 ‘사이언스 어드밴시스(Science Advances)’Vol.10(39)에 게재 및 Headline article로 소개되었다. (논문명: Dynamically reconfigurable shape-morphing and tactile display via hydraulically coupled mergeable and splittable PVC gel actuator)
또한 본 연구는 지난 8월 한국햅틱스학술대회에서 최우수논문상을 수상했다. 한편 본 연구는 국가과학기술연구회(CRC23021-000), 삼성미래기술육성재단(SRFC-IT2102-04), 한국전자통신연구원(24YB1700)의 지원으로 수행됐다.
2024.09.30 조회수 5407 -
 화학적, 전기적 양방향 소통이 가능한 파이버형 뇌-컴퓨터 인터페이스 개발
뇌 속 뉴런은 화학적, 전기적 신호가 동시에 작동하면서 정교한 시스템을 만들어내지만 현재까지는 이러한 신호를 동시에 주고받으면서 신경의 작동 원리를 확인할 수 있는 장치가 존재하지 않았다. 한국 연구진이 화학적 신호와 전기적 신호를 양 방향적으로 주고받으며 세부적인 신호 전달 체계를 탐사할 수 있는 다기능 신경 인터페이스를 개발하여 앞으로 신경 체계 연구, 질환 연구 및 치료에 획기적인 발전을 가져올 것으로 기대한다.
우리 대학 바이오및뇌공학과 박성준 교수 연구팀이, 초소형 와이어 병합 열 인발공정(Microwire Co-drawing Thermal Drawing Process, MC-TDP)*을 통해 카본, 폴리머, 금속의 다양한 재료를 통합하여 4가지 기능성을 가진 다기능 섬유형 신경 인터페이스를 개발했다고 13일 밝혔다.
☞ 열 인발공정 : 열을 가해 큰 구조체의 복잡한 구조체를 빠른 속도로 당겨 같은 모양 및 기능을 갖춘 섬유를 뽑아내는 일 또는 가공
뇌신경 시스템 조사를 위한 삽입형 인터페이스는 전기적 성능에 중점을 두고 발전해 왔다. 하지만 전기적, 화학적 신호의 시너지 효과를 연구하기 위해서는 전기적 신호뿐만 아니라 화학적 신호의 역학을 기록하고 화학적 자극 또한 할 수 있는 신경 디바이스가 필요했다. 그러나 기존의 제작 방법으로는 다양한 자극과 기록을 수행할 수 있는 다양한 재료를 융합하는 것이 어려웠고, 특히 마이크로미터 스케일로 정교한 다기능성 신경 인터페이스를 만드는 것이 어렵다는 문제가 있었다.
연구팀은 문제 해결을 위해 이번 연구에서 초소형 와이어 병합 열 인발공정을 통해 머리카락 크기의 다기능 섬유를 뽑아내는 동안 초소형 와이어를 병합하고 카본 파이버를 융합하여 뉴런 사이에서 일어나는 대표적인 신호 전달을 동시에 조사할 수 있는 다기능 섬유를 제작했다. 연구팀은 제작된 하나의 섬유가 카본 파이버를 통한 도파민 모니터링, 마이크로 유체관을 통한 약물 주입, 폴리머 광 도파관을 통한 광 유전학적 신경 자극, 그리고 초소형 와이어를 통한 전기신호 측정을 할 수 있음을 확인했다.
해당 뇌-기계 인터페이스를 실제 쥐 모델에서 광유전학적 자극에 따른 화학적 신경전달물질 중 도파민과 전기적 신경 활성 신호를 효과적으로 측정하고 약물에 따른 도파민 방출량의 변화를 확인할 수 있음을 보였다. 또한 연구팀은 개발된 섬유가 자발적인 신경 신호를 측정할 수 있음을 보여주며 신경 인터페이스로써의 범용적 사용성도 확인했다.
이번 연구 결과는 국제 학술지 '에이씨에스 나노(ACS Nano)'에 2024년 5월 온라인 출판됐다. (논문명: A Multifunctional and Flexible Neural Probe with Thermally Drawn Fibers for Bidirectional Synaptic Probing in the Brain)
박성준 교수는 "화학적 신경전달물질 기록 및 화학적 자극, 전기적 신경 활성신호 기록, 그리고 광학적 조절 기능을 갖춘 차세대 초다기능성 신경 인터페이스의 개발 성과ˮ임을 강조하며, "향후 다양한 신경 회로에의 적용을 통해 신경 회로의 작동원리 규명과 뇌 질환의 세부적인 메커니즘 파악에 사용될 수 있을 것ˮ 이라고 말했다.
한편 이번 연구는 한국연구재단 기초연구실, STEAM연구사업 및 범부처재생의료기술사업의 지원을 받아 수행됐다.
2024.05.13 조회수 6387
화학적, 전기적 양방향 소통이 가능한 파이버형 뇌-컴퓨터 인터페이스 개발
뇌 속 뉴런은 화학적, 전기적 신호가 동시에 작동하면서 정교한 시스템을 만들어내지만 현재까지는 이러한 신호를 동시에 주고받으면서 신경의 작동 원리를 확인할 수 있는 장치가 존재하지 않았다. 한국 연구진이 화학적 신호와 전기적 신호를 양 방향적으로 주고받으며 세부적인 신호 전달 체계를 탐사할 수 있는 다기능 신경 인터페이스를 개발하여 앞으로 신경 체계 연구, 질환 연구 및 치료에 획기적인 발전을 가져올 것으로 기대한다.
우리 대학 바이오및뇌공학과 박성준 교수 연구팀이, 초소형 와이어 병합 열 인발공정(Microwire Co-drawing Thermal Drawing Process, MC-TDP)*을 통해 카본, 폴리머, 금속의 다양한 재료를 통합하여 4가지 기능성을 가진 다기능 섬유형 신경 인터페이스를 개발했다고 13일 밝혔다.
☞ 열 인발공정 : 열을 가해 큰 구조체의 복잡한 구조체를 빠른 속도로 당겨 같은 모양 및 기능을 갖춘 섬유를 뽑아내는 일 또는 가공
뇌신경 시스템 조사를 위한 삽입형 인터페이스는 전기적 성능에 중점을 두고 발전해 왔다. 하지만 전기적, 화학적 신호의 시너지 효과를 연구하기 위해서는 전기적 신호뿐만 아니라 화학적 신호의 역학을 기록하고 화학적 자극 또한 할 수 있는 신경 디바이스가 필요했다. 그러나 기존의 제작 방법으로는 다양한 자극과 기록을 수행할 수 있는 다양한 재료를 융합하는 것이 어려웠고, 특히 마이크로미터 스케일로 정교한 다기능성 신경 인터페이스를 만드는 것이 어렵다는 문제가 있었다.
연구팀은 문제 해결을 위해 이번 연구에서 초소형 와이어 병합 열 인발공정을 통해 머리카락 크기의 다기능 섬유를 뽑아내는 동안 초소형 와이어를 병합하고 카본 파이버를 융합하여 뉴런 사이에서 일어나는 대표적인 신호 전달을 동시에 조사할 수 있는 다기능 섬유를 제작했다. 연구팀은 제작된 하나의 섬유가 카본 파이버를 통한 도파민 모니터링, 마이크로 유체관을 통한 약물 주입, 폴리머 광 도파관을 통한 광 유전학적 신경 자극, 그리고 초소형 와이어를 통한 전기신호 측정을 할 수 있음을 확인했다.
해당 뇌-기계 인터페이스를 실제 쥐 모델에서 광유전학적 자극에 따른 화학적 신경전달물질 중 도파민과 전기적 신경 활성 신호를 효과적으로 측정하고 약물에 따른 도파민 방출량의 변화를 확인할 수 있음을 보였다. 또한 연구팀은 개발된 섬유가 자발적인 신경 신호를 측정할 수 있음을 보여주며 신경 인터페이스로써의 범용적 사용성도 확인했다.
이번 연구 결과는 국제 학술지 '에이씨에스 나노(ACS Nano)'에 2024년 5월 온라인 출판됐다. (논문명: A Multifunctional and Flexible Neural Probe with Thermally Drawn Fibers for Bidirectional Synaptic Probing in the Brain)
박성준 교수는 "화학적 신경전달물질 기록 및 화학적 자극, 전기적 신경 활성신호 기록, 그리고 광학적 조절 기능을 갖춘 차세대 초다기능성 신경 인터페이스의 개발 성과ˮ임을 강조하며, "향후 다양한 신경 회로에의 적용을 통해 신경 회로의 작동원리 규명과 뇌 질환의 세부적인 메커니즘 파악에 사용될 수 있을 것ˮ 이라고 말했다.
한편 이번 연구는 한국연구재단 기초연구실, STEAM연구사업 및 범부처재생의료기술사업의 지원을 받아 수행됐다.
2024.05.13 조회수 6387 -
 초장기간 작동 뇌-기계 인터페이스 개발
수술이 불가피한 삽입형 신경 인터페이스의 경우, 한 번의 수술로도 최대한 많은 정보를 얻을 수 있고 장기간 사용가능한 디바이스의 개발이 필요하다. 한국 연구진이 1년 이상 사용가능한 다기능성 신경 인터페이스를 개발하여 향후 뇌 지도, 질환 연구 및 치료에 획기적인 발전을 가져올 것으로 기대한다.
우리 대학 바이오및뇌공학과 박성준 교수 연구팀과 한양대학교(총장 이기정) 바이오메디컬공학과 최창순 교수 연구팀이, 열 인발공정(Thermal Drawing Process, TDP)*과 탄소나노튜브 시트를 병합해 장기간 사용 가능한 다기능성 섬유형 신경 인터페이스를 개발했다고 24일 밝혔다.
☞ 열 인발공정 : 열을 가해 큰 구조체의 복잡한 구조체를 빠른 속도로 당겨 같은 모양 및 기능을 갖춘 섬유를 뽑아내는 일 또는 가공.
뇌신경 시스템 탐구를 위한 삽입형 인터페이스는 생체 시스템의 면역 반응을 줄이기 위해 생체 친화적이며 부드러운 물질을 사용하면서도, 다양한 기능을 병합하는 방향으로 발전해 왔다. 하지만 기존의 재료와 제작 방법으로는 다양한 기능을 구현할 수 있으면서도 장기간 사용가능한 디바이스를 만들기 어려웠고, 특히 탄소 기반 전극의 경우 제조 및 병합 과정이 복잡하고 금속 전극에 비해 기능적 수행 능력이 떨어진다는 문제점이 있었다.
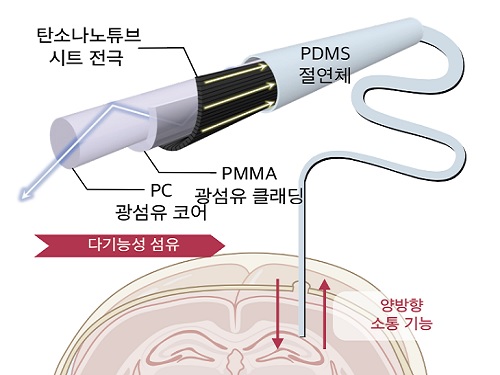
연구팀은 문제 해결을 위해 이번 연구에서 탄소나노튜브 시트 전극과 고분자 광섬유를 병합했다. 탄소나노튜브 섬유가 한 방향으로 배열된 탄소나노튜브 시트 전극을 통해 신경세포 활동을 효과적으로 기록했고, 광 전달을 담당하는 고분자 광섬유에 이를 감아 머리카락 크기의 다기능 섬유를 제작했다. 연구팀은 제작된 섬유는 우수한 전기적, 광학적, 기계적 성질을 보였음을 확인했다.
해당 뇌-기계 인터페이스를 실제 쥐 모델에 삽입한 결과, 전기적 신경 활성신호, 화학적 신경전달물질(도파민)을 잘 측정하고 광유전학적 조절을 통해 행동학적 산출을 이끌어낼 수 있음을 확인했다. 또한 연구팀은 1년 이상 광학적으로 발화된 신경 신호와 자발적으로 발화된 신경 신호를 측정함으로써 초장기간 사용 가능성도 보여줬다.
이번 연구 결과는 국제 학술지 `어드밴스드 머터리얼스(Advanced Materials)'에 2024년 3월 29일 字로 출판됐다. (논문명: Structurally Aligned Multifunctional neural Probe (SAMP) using forest-drawn CNT sheet onto thermally drawn polymer fiber for long-term in vivo operation)
박성준 교수는 "전기적 신경 활성신호와 더불어 화학적 신경전달물질 기록 및 광학적 조절 기능을 갖춘 초장기간 사용가능한 차세대 신경 인터페이스의 개발 성과ˮ임을 강조하며, "향후 대동물 적용 및 자기공명영상 장비와 동시 사용을 통해 뇌 질환의 세부적인 메커니즘 파악과 전뇌적(Whole brain) 기록 및 조절 분야에 사용될 수 있을 것ˮ 이라고 말했다.
한편 이번 연구는 과학기술정보통신부, 한국연구재단 나노및소재기술개발사업, 경찰청 미래치안도전기술개발사업의 지원을 받아 수행됐다.
2024.04.24 조회수 7342
초장기간 작동 뇌-기계 인터페이스 개발
수술이 불가피한 삽입형 신경 인터페이스의 경우, 한 번의 수술로도 최대한 많은 정보를 얻을 수 있고 장기간 사용가능한 디바이스의 개발이 필요하다. 한국 연구진이 1년 이상 사용가능한 다기능성 신경 인터페이스를 개발하여 향후 뇌 지도, 질환 연구 및 치료에 획기적인 발전을 가져올 것으로 기대한다.
우리 대학 바이오및뇌공학과 박성준 교수 연구팀과 한양대학교(총장 이기정) 바이오메디컬공학과 최창순 교수 연구팀이, 열 인발공정(Thermal Drawing Process, TDP)*과 탄소나노튜브 시트를 병합해 장기간 사용 가능한 다기능성 섬유형 신경 인터페이스를 개발했다고 24일 밝혔다.
☞ 열 인발공정 : 열을 가해 큰 구조체의 복잡한 구조체를 빠른 속도로 당겨 같은 모양 및 기능을 갖춘 섬유를 뽑아내는 일 또는 가공.
뇌신경 시스템 탐구를 위한 삽입형 인터페이스는 생체 시스템의 면역 반응을 줄이기 위해 생체 친화적이며 부드러운 물질을 사용하면서도, 다양한 기능을 병합하는 방향으로 발전해 왔다. 하지만 기존의 재료와 제작 방법으로는 다양한 기능을 구현할 수 있으면서도 장기간 사용가능한 디바이스를 만들기 어려웠고, 특히 탄소 기반 전극의 경우 제조 및 병합 과정이 복잡하고 금속 전극에 비해 기능적 수행 능력이 떨어진다는 문제점이 있었다.
연구팀은 문제 해결을 위해 이번 연구에서 탄소나노튜브 시트 전극과 고분자 광섬유를 병합했다. 탄소나노튜브 섬유가 한 방향으로 배열된 탄소나노튜브 시트 전극을 통해 신경세포 활동을 효과적으로 기록했고, 광 전달을 담당하는 고분자 광섬유에 이를 감아 머리카락 크기의 다기능 섬유를 제작했다. 연구팀은 제작된 섬유는 우수한 전기적, 광학적, 기계적 성질을 보였음을 확인했다.
해당 뇌-기계 인터페이스를 실제 쥐 모델에 삽입한 결과, 전기적 신경 활성신호, 화학적 신경전달물질(도파민)을 잘 측정하고 광유전학적 조절을 통해 행동학적 산출을 이끌어낼 수 있음을 확인했다. 또한 연구팀은 1년 이상 광학적으로 발화된 신경 신호와 자발적으로 발화된 신경 신호를 측정함으로써 초장기간 사용 가능성도 보여줬다.
이번 연구 결과는 국제 학술지 `어드밴스드 머터리얼스(Advanced Materials)'에 2024년 3월 29일 字로 출판됐다. (논문명: Structurally Aligned Multifunctional neural Probe (SAMP) using forest-drawn CNT sheet onto thermally drawn polymer fiber for long-term in vivo operation)
박성준 교수는 "전기적 신경 활성신호와 더불어 화학적 신경전달물질 기록 및 광학적 조절 기능을 갖춘 초장기간 사용가능한 차세대 신경 인터페이스의 개발 성과ˮ임을 강조하며, "향후 대동물 적용 및 자기공명영상 장비와 동시 사용을 통해 뇌 질환의 세부적인 메커니즘 파악과 전뇌적(Whole brain) 기록 및 조절 분야에 사용될 수 있을 것ˮ 이라고 말했다.
한편 이번 연구는 과학기술정보통신부, 한국연구재단 나노및소재기술개발사업, 경찰청 미래치안도전기술개발사업의 지원을 받아 수행됐다.
2024.04.24 조회수 7342 -
 땀에도 강한 웨어러블 로봇 제어 센서 선보이다
노인, 뇌졸중 환자, 외상 환자들의 다양한 재활치료에 활용되는 웨어러블 로봇이 착용자의 땀, 각질 등에도 끄떡없이 장기간 안정적으로 제어 가능하도록 도와주는 근전도 센서 기술이 개발되어 화제다.
우리 대학 전기및전자공학부 정재웅 교수와 기계공학과 김정 교수 연구팀이 공동 연구를 통해 피부 상태에 영향을 받지 않는 고품질의 전기 생리 신호 측정이 가능한 신축·접착성 마이크로니들 센서를 개발하는 데 성공했다고 23일 밝혔다.
다양한 재활치료에 활용되는 웨어러블 로봇이 사람의 움직임 의도를 인식하기 위해서는 몸에서 발생하는 근전도를 정확하게 측정하는 웨어러블 전기 생리 센서가 필요하다. 하지만 기존의 센서들은 시간에 따라 신호의 품질이 떨어지거나, 피부의 털, 각질, 땀 등의 영향을 많이 받고, 나아가 피부보다 단단한 물성으로 움직임 시 피부 변형을 따라갈 수 없어 노이즈(신호 잡음)를 발생시킬 수 있다. 이러한 단점들은 장시간의 신뢰성 높은 웨어러블 로봇 제어를 힘들게 한다.
이번에 개발된 기술은 잘 늘어나며 접착성이 있는 전도성 기판에 피부 각질층을 통과할 수 있는 마이크로니들 어레이를 집적해 불편함 없이 장기간 고품질의 근전도 측정을 가능하게 할 것으로 예상된다. 이와 같은 우수한 성능을 통해 땀, 각질 등을 제거하는 피부 준비 작업을 거치지 않아도 시간에 따른 착용자의 피부 상태 변화에 상관없이 웨어러블 로봇을 안정적으로 제어할 수 있을 것이라 기대된다.
연구팀은 부드러운 실리콘 중합체 기판을 활용해서 마이크로니들을 집적해 신축·접착성 마이크로니들 센서를 제작했다. 단단한 마이크로니들이 높은 저항을 가진 피부의 각질층을 투과해 피부 접촉 저항을 효과적으로 낮춰 털, 각질, 땀, 이물질로 피부가 오염돼도 고품질의 전기 생리 신호를 얻을 수 있다. 동시에 부드러운 전도성 접착 기판이 사람의 움직임으로 인한 피부의 늘어남에 순응해 편안한 착용감을 제공하고 움직임으로 인한 동작 잡음을 최소화할 수 있다.
연구팀은 개발된 신축·접착성 마이크로니들 센서 패치의 효용성을 검증하기 위해 웨어러블 로봇을 이용한 동작 보조 실험을 진행했다. 다리에 부착된 신축·접착성 마이크로니들 센서 패치는 근육에서 발생하는 전기신호를 감지하고 동작 의도를 웨어러블 로봇에 전송해 사람이 무거운 짐을 손쉽게 들어올릴 수 있도록 도와준다.
마이크로니들 센서 패치를 사용했을 때 피부 상태, 신체 움직임의 크기 및 종류와 상관없이 안정적인 근전도 센싱에 기반한 동작 의도 인식을 통해 웨어러블 로봇이 사용자의 동작을 효과적으로 보조할 수 있음을 연구팀은 확인했다.
이번 연구를 주도한 정재웅 교수는 “개발된 신축·접착성 마이크로니들 센서는 피부 상태에 영향받지 않는 안정적인 근전도 센싱을 통해 더욱 정확하고 안정적인 웨어러블 로봇 제어를 가능하게 하여 로봇을 활용하는 환자의 재활을 더 용이하게 할 수 있을 것이다”라고 말했다.
전기및전자공학부 김희수 박사과정과 이주현 박사과정 학생이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 ‘사이언스 어드밴시스(Science Advances)’ 1월 17일 字에 게재됐다.
(논문명 : Skin-preparation-free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control)
한편 이번 연구는 한국연구재단이 추진하는 생체신호센서융합기술개발사업, 전자약기술개발사업, 4단계 BK21 사업의 지원을 받아 수행됐다.
2024.01.23 조회수 7911
땀에도 강한 웨어러블 로봇 제어 센서 선보이다
노인, 뇌졸중 환자, 외상 환자들의 다양한 재활치료에 활용되는 웨어러블 로봇이 착용자의 땀, 각질 등에도 끄떡없이 장기간 안정적으로 제어 가능하도록 도와주는 근전도 센서 기술이 개발되어 화제다.
우리 대학 전기및전자공학부 정재웅 교수와 기계공학과 김정 교수 연구팀이 공동 연구를 통해 피부 상태에 영향을 받지 않는 고품질의 전기 생리 신호 측정이 가능한 신축·접착성 마이크로니들 센서를 개발하는 데 성공했다고 23일 밝혔다.
다양한 재활치료에 활용되는 웨어러블 로봇이 사람의 움직임 의도를 인식하기 위해서는 몸에서 발생하는 근전도를 정확하게 측정하는 웨어러블 전기 생리 센서가 필요하다. 하지만 기존의 센서들은 시간에 따라 신호의 품질이 떨어지거나, 피부의 털, 각질, 땀 등의 영향을 많이 받고, 나아가 피부보다 단단한 물성으로 움직임 시 피부 변형을 따라갈 수 없어 노이즈(신호 잡음)를 발생시킬 수 있다. 이러한 단점들은 장시간의 신뢰성 높은 웨어러블 로봇 제어를 힘들게 한다.
이번에 개발된 기술은 잘 늘어나며 접착성이 있는 전도성 기판에 피부 각질층을 통과할 수 있는 마이크로니들 어레이를 집적해 불편함 없이 장기간 고품질의 근전도 측정을 가능하게 할 것으로 예상된다. 이와 같은 우수한 성능을 통해 땀, 각질 등을 제거하는 피부 준비 작업을 거치지 않아도 시간에 따른 착용자의 피부 상태 변화에 상관없이 웨어러블 로봇을 안정적으로 제어할 수 있을 것이라 기대된다.
연구팀은 부드러운 실리콘 중합체 기판을 활용해서 마이크로니들을 집적해 신축·접착성 마이크로니들 센서를 제작했다. 단단한 마이크로니들이 높은 저항을 가진 피부의 각질층을 투과해 피부 접촉 저항을 효과적으로 낮춰 털, 각질, 땀, 이물질로 피부가 오염돼도 고품질의 전기 생리 신호를 얻을 수 있다. 동시에 부드러운 전도성 접착 기판이 사람의 움직임으로 인한 피부의 늘어남에 순응해 편안한 착용감을 제공하고 움직임으로 인한 동작 잡음을 최소화할 수 있다.
연구팀은 개발된 신축·접착성 마이크로니들 센서 패치의 효용성을 검증하기 위해 웨어러블 로봇을 이용한 동작 보조 실험을 진행했다. 다리에 부착된 신축·접착성 마이크로니들 센서 패치는 근육에서 발생하는 전기신호를 감지하고 동작 의도를 웨어러블 로봇에 전송해 사람이 무거운 짐을 손쉽게 들어올릴 수 있도록 도와준다.
마이크로니들 센서 패치를 사용했을 때 피부 상태, 신체 움직임의 크기 및 종류와 상관없이 안정적인 근전도 센싱에 기반한 동작 의도 인식을 통해 웨어러블 로봇이 사용자의 동작을 효과적으로 보조할 수 있음을 연구팀은 확인했다.
이번 연구를 주도한 정재웅 교수는 “개발된 신축·접착성 마이크로니들 센서는 피부 상태에 영향받지 않는 안정적인 근전도 센싱을 통해 더욱 정확하고 안정적인 웨어러블 로봇 제어를 가능하게 하여 로봇을 활용하는 환자의 재활을 더 용이하게 할 수 있을 것이다”라고 말했다.
전기및전자공학부 김희수 박사과정과 이주현 박사과정 학생이 공동 제1 저자로 참여한 이번 연구는 국제 학술지 ‘사이언스 어드밴시스(Science Advances)’ 1월 17일 字에 게재됐다.
(논문명 : Skin-preparation-free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control)
한편 이번 연구는 한국연구재단이 추진하는 생체신호센서융합기술개발사업, 전자약기술개발사업, 4단계 BK21 사업의 지원을 받아 수행됐다.
2024.01.23 조회수 7911 -
 스파이더맨 슈트처럼 내 몸에 착 맞춰지는 옷감형 웨어러블 햅틱 개발
우리 대학 기계공학과 오일권 교수 연구팀이 형상기억합금 와이어를 오그제틱(auxetic) 메타구조로 매듭지어 형상 적응이 가능한 옷감 형태의 착용형 '햅틱(haptic) 인터페이스'를 개발했다고 28일 밝혔다.
착용형 햅틱 인터페이스 기술은 시·청각 기반의 플랫폼의 한계를 벗어나, 피부 표면으로 전해지는 직관적인 촉감으로 메타버스 속 상호작용 몰입도를 높이는 역할을 한다.
하지만 일반적인 햅틱 인터페이스는 피부에 부착하거나 별도의 고정 장치를 착용하는 착용(부착)형으로, 이러한 햅틱 인터페이스는 장시간 사용 시 피부 발진의 위험과 고정 방식은 일상 움직임에서 불편함을 초래할 수 있다. 또 수십 개의 촉각 전달 소자를 장착해 촉감을 모방하는 기존의 제작 방식 역시 장치의 무게·부피 증가로 이어지는 한계를 보이고 있다.
우선 연구팀은 가볍고 편하게 착용할 수 있는 햅틱 인터페이스 개발을 위해 형상기억합금 와이어를 핵심 소재로 선택했다. 형상기억합금 와이어란 상온에서 모양이 쉽게 변형되고, 특정 온도에 도달하면 미리 기억된 형태로 되돌아가는 특징을 갖는 형상기억합금을 철사처럼 가늘고 길게 제작한 것이다. 이러한 형상기억합금 와이어를 기존의 천 제작 방식을 활용해 매듭지어 옷감처럼 제작하는 방식을 활용하였다. 특히, 연구팀은 형상기억합금 와이어를 오그제틱(auxetic) 구조로 매듭지어, 일반 구조에서는 볼 수 없는 3D 방향으로 구조 전체가 동시에 수축 및 이완하는 특성을 구현해 내었고, 이를 통해 착용자의 신체 형상에 순응하며 사이즈가 자동으로 조절되는 옷감형 액추에이터를 개발했다.
또한 연구팀은 8개의 영역을 개별 수축 제어할 수 있도록 설계해 총 아홉 가지 방향과 타이밍에 대한 정보를 사용자에게 촉감 피드백으로 전달할 수 있게 제작했다.
예로 팔목에 착용 시, 사용자는 방향 및 타이밍에 관한 정보를 촉각적으로 인지할 수 있고, 반면 팔꿈치에 착용할 때는 옷감형 액추에이터의 가변강성 기능을 활용해 팔꿈치의 굽힘각도에 따른 피드백을 제공하는 멀티모달(두 가지 이상의 피드백 형태로 정보를 전달) 햅틱 인터페이스로서 개발했다.
이처럼 옷감형 액추에이터를 팔목에 착용한 사용자가 가상현실 속 모빌리티 로봇 주변의 위치정보를 파악하고, 시각과 청각 정보가 제한될 때 장애물을 피해 로봇을 안정적으로 주행하는 실증에도 성공했다.
오일권 교수는 이번 연구성과를 통한 실용화 시 활용에 대해 "착용형 햅틱 인터페이스는 촉각 정보를 활용한 로봇, 무인기 제어와 메타버스가 접목된 의료·교육 등에도 활용할 수 있다"고 말했다.
한편, 이번 연구는 과학기술정보통신부(장관 이종호)와 한국연구재단이 추진하는 리더연구자(창의연구) 지원 사업으로 수행됐다. 연구 성과는 첨단 소재 분야 국제학술지 <어드밴스드 머티리얼스(Advanced Materials)>에 9월 19일 게재됐고, 연구의 우수성을 인정받아 학술지 표지 논문으로 선정됐다. (논문명: Easy-To-Wear Auxetic SMA Knot-Architecture for Spatiotemporal and Multimodal Haptic Feedbacks)
2023.11.30 조회수 8195
스파이더맨 슈트처럼 내 몸에 착 맞춰지는 옷감형 웨어러블 햅틱 개발
우리 대학 기계공학과 오일권 교수 연구팀이 형상기억합금 와이어를 오그제틱(auxetic) 메타구조로 매듭지어 형상 적응이 가능한 옷감 형태의 착용형 '햅틱(haptic) 인터페이스'를 개발했다고 28일 밝혔다.
착용형 햅틱 인터페이스 기술은 시·청각 기반의 플랫폼의 한계를 벗어나, 피부 표면으로 전해지는 직관적인 촉감으로 메타버스 속 상호작용 몰입도를 높이는 역할을 한다.
하지만 일반적인 햅틱 인터페이스는 피부에 부착하거나 별도의 고정 장치를 착용하는 착용(부착)형으로, 이러한 햅틱 인터페이스는 장시간 사용 시 피부 발진의 위험과 고정 방식은 일상 움직임에서 불편함을 초래할 수 있다. 또 수십 개의 촉각 전달 소자를 장착해 촉감을 모방하는 기존의 제작 방식 역시 장치의 무게·부피 증가로 이어지는 한계를 보이고 있다.
우선 연구팀은 가볍고 편하게 착용할 수 있는 햅틱 인터페이스 개발을 위해 형상기억합금 와이어를 핵심 소재로 선택했다. 형상기억합금 와이어란 상온에서 모양이 쉽게 변형되고, 특정 온도에 도달하면 미리 기억된 형태로 되돌아가는 특징을 갖는 형상기억합금을 철사처럼 가늘고 길게 제작한 것이다. 이러한 형상기억합금 와이어를 기존의 천 제작 방식을 활용해 매듭지어 옷감처럼 제작하는 방식을 활용하였다. 특히, 연구팀은 형상기억합금 와이어를 오그제틱(auxetic) 구조로 매듭지어, 일반 구조에서는 볼 수 없는 3D 방향으로 구조 전체가 동시에 수축 및 이완하는 특성을 구현해 내었고, 이를 통해 착용자의 신체 형상에 순응하며 사이즈가 자동으로 조절되는 옷감형 액추에이터를 개발했다.
또한 연구팀은 8개의 영역을 개별 수축 제어할 수 있도록 설계해 총 아홉 가지 방향과 타이밍에 대한 정보를 사용자에게 촉감 피드백으로 전달할 수 있게 제작했다.
예로 팔목에 착용 시, 사용자는 방향 및 타이밍에 관한 정보를 촉각적으로 인지할 수 있고, 반면 팔꿈치에 착용할 때는 옷감형 액추에이터의 가변강성 기능을 활용해 팔꿈치의 굽힘각도에 따른 피드백을 제공하는 멀티모달(두 가지 이상의 피드백 형태로 정보를 전달) 햅틱 인터페이스로서 개발했다.
이처럼 옷감형 액추에이터를 팔목에 착용한 사용자가 가상현실 속 모빌리티 로봇 주변의 위치정보를 파악하고, 시각과 청각 정보가 제한될 때 장애물을 피해 로봇을 안정적으로 주행하는 실증에도 성공했다.
오일권 교수는 이번 연구성과를 통한 실용화 시 활용에 대해 "착용형 햅틱 인터페이스는 촉각 정보를 활용한 로봇, 무인기 제어와 메타버스가 접목된 의료·교육 등에도 활용할 수 있다"고 말했다.
한편, 이번 연구는 과학기술정보통신부(장관 이종호)와 한국연구재단이 추진하는 리더연구자(창의연구) 지원 사업으로 수행됐다. 연구 성과는 첨단 소재 분야 국제학술지 <어드밴스드 머티리얼스(Advanced Materials)>에 9월 19일 게재됐고, 연구의 우수성을 인정받아 학술지 표지 논문으로 선정됐다. (논문명: Easy-To-Wear Auxetic SMA Knot-Architecture for Spatiotemporal and Multimodal Haptic Feedbacks)
2023.11.30 조회수 8195 -
 상상만으로 원하는 방향으로 사용가능한 로봇 팔 뇌-기계 인터페이스 개발
우리 대학 뇌인지과학과 정재승 교수 연구팀이 인간의 뇌 신호를 해독해 장기간의 훈련 없이 생각만으로 로봇 팔을 원하는 방향으로 제어하는 뇌-기계 인터페이스 시스템을 개발했다고 24일 밝혔다.
서울의대 신경외과 정천기 교수 연구팀과 공동연구로 진행된 이번 연구에서 정 교수 연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다. 이러한 디코딩 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않기 때문에 운동장애를 겪는 환자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇 팔을 제어할 수 있어 앞으로 다양한 의료기기에 폭넓게 적용되리라 기대된다.
바이오및뇌공학과 장상진 박사과정이 제1 저자로 참여한 이번 연구는 뇌공학 분야의 세계적인 국제 학술지 `저널 오브 뉴럴 엔지니어링 (Journal of Neural Engineering)' 9월 19권 5호에 출판됐다. (논문명 : Decoding trajectories of imagined hand movement using electrocorticograms for brain-machine interface).
뇌-기계 인터페이스는 인간이 생각만으로 기계를 제어할 수 있는 기술로, 팔을 움직이는 데 장애가 있거나 절단된 환자가 로봇 팔을 제어해 일상에 필요한 팔 동작을 회복할 수 있는 보조기술로 크게 주목받고 있다.
로봇 팔 제어를 위한 뇌-기계 인터페이스를 구현하기 위해서는 인간이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고 기계학습 등 다양한 인공지능 분석기법으로 뇌 신호를 해독해 의도한 움직임을 뇌 신호로부터 예측할 수 있는 디코딩 기술이 필요하다.
그러나 상지 절단 등으로 운동장애를 겪는 환자는 팔을 실제로 움직이기 어려우므로, 상상만으로 로봇 팔의 방향을 지시할 수 있는 인터페이스가 절실히 요구된다. 뇌 신호 디코딩 기술은 팔의 실제 움직임이 아닌 상상 뇌 신호에서 어느 방향으로 사용자가 상상했는지 예측할 수 있어야 하는데, 상상 뇌 신호는 실제 움직임 뇌 신호보다 신호대잡음비(signal to noise ratio)가 현저히 낮아 팔의 정확한 방향을 예측하기 어려운 문제점이 오랫동안 난제였다. 이러한 문제점을 극복하고자 기존 연구들에서는 팔을 움직이기 위해 신호대잡음비가 더 높은 다른 신체 동작을 상상하는 방법을 시도했으나, 의도하고자 하는 팔 뻗기와 인지적 동작 간의 부자연스러운 괴리로 인해 사용자가 장기간 훈련해야 하는 불편함을 초래했다.
따라서 팔을 뻗는 상상을 할 때 어느 방향으로 뻗었는지 예측하는 디코딩 기술은 정확도가 떨어지고 환자가 사용법을 습득하기 어려운 문제점이 있다. 이 문제가 오랫동안 뇌-기계 인터페이스 분야에서 해결해야 할 난제였다.
연구팀은 문제 해결을 위해 사용자의 자연스러운 팔 동작 상상을 공간해상도가 우수한 대뇌 피질 신호(electrocorticogram)로 측정하고, 변분 베이지안 최소제곱(variational Bayesian least square) 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산할 수 있는 디코딩 기술을 처음으로 개발했다.
연구팀의 팔 동작 상상 신호 분석기술은 운동피질을 비롯한 특정 대뇌 영역에 국한되지 않아, 사용자마다 상이할 수 있는 상상 신호와 대뇌 영역 특성을 맞춤형으로 학습해 최적의 계산모델 파라미터 결괏값을 출력할 수 있다.
연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있음을 확인했다.
나아가 계산모델을 분석함으로써 방향 상상에 중요한 대뇌의 시공간적 특성을 밝혔고, 상상하는 인지적 과정이 팔을 실제로 뻗는 과정에 근접할수록 방향 예측정확도가 상당히 더 높아질 수 있음을 연구팀은 확인했다.
연구팀은 지난 2월 인공지능과 유전자 알고리즘 기반 고 정확도 로봇 팔 제어 뇌-기계 인터페이스 선행 연구 결과를 세계적인 학술지 `어플라이드 소프트 컴퓨팅(Applied soft computing)'에 발표한 바 있다. 이번 후속 연구는 그에 기반해 계산 알고리즘 간소화, 로봇 팔 구동 테스트, 환자의 상상 전략 개선 등 실전에 근접한 사용환경을 조성해 실제로 로봇 팔을 구동하고 의도한 방향으로 로봇 팔이 이동하는지 테스트를 진행했고, 네 가지 방향에 대한 의도를 읽어 정확하게 목표물에 도달하는 시연에 성공했다.
연구팀이 개발한 팔 동작 방향 상상 뇌 신호 분석기술은 향후 사지마비 환자를 비롯한 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 향상, 효율성 개선 등에 이바지할 수 있을 것으로 기대된다.
연구책임자 정재승 교수는 "장애인마다 상이한 뇌 신호를 맞춤형으로 분석해 장기간 훈련을 받지 않더라도 로봇 팔을 제어할 수 있는 기술은 혁신적인 결과이며, 이번 기술은 향후 의수를 대신할 로봇팔을 상용화하는 데에도 크게 기여할 것으로 기대된다ˮ고 말했다.
2022.10.24 조회수 10728
상상만으로 원하는 방향으로 사용가능한 로봇 팔 뇌-기계 인터페이스 개발
우리 대학 뇌인지과학과 정재승 교수 연구팀이 인간의 뇌 신호를 해독해 장기간의 훈련 없이 생각만으로 로봇 팔을 원하는 방향으로 제어하는 뇌-기계 인터페이스 시스템을 개발했다고 24일 밝혔다.
서울의대 신경외과 정천기 교수 연구팀과 공동연구로 진행된 이번 연구에서 정 교수 연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다. 이러한 디코딩 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않기 때문에 운동장애를 겪는 환자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇 팔을 제어할 수 있어 앞으로 다양한 의료기기에 폭넓게 적용되리라 기대된다.
바이오및뇌공학과 장상진 박사과정이 제1 저자로 참여한 이번 연구는 뇌공학 분야의 세계적인 국제 학술지 `저널 오브 뉴럴 엔지니어링 (Journal of Neural Engineering)' 9월 19권 5호에 출판됐다. (논문명 : Decoding trajectories of imagined hand movement using electrocorticograms for brain-machine interface).
뇌-기계 인터페이스는 인간이 생각만으로 기계를 제어할 수 있는 기술로, 팔을 움직이는 데 장애가 있거나 절단된 환자가 로봇 팔을 제어해 일상에 필요한 팔 동작을 회복할 수 있는 보조기술로 크게 주목받고 있다.
로봇 팔 제어를 위한 뇌-기계 인터페이스를 구현하기 위해서는 인간이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고 기계학습 등 다양한 인공지능 분석기법으로 뇌 신호를 해독해 의도한 움직임을 뇌 신호로부터 예측할 수 있는 디코딩 기술이 필요하다.
그러나 상지 절단 등으로 운동장애를 겪는 환자는 팔을 실제로 움직이기 어려우므로, 상상만으로 로봇 팔의 방향을 지시할 수 있는 인터페이스가 절실히 요구된다. 뇌 신호 디코딩 기술은 팔의 실제 움직임이 아닌 상상 뇌 신호에서 어느 방향으로 사용자가 상상했는지 예측할 수 있어야 하는데, 상상 뇌 신호는 실제 움직임 뇌 신호보다 신호대잡음비(signal to noise ratio)가 현저히 낮아 팔의 정확한 방향을 예측하기 어려운 문제점이 오랫동안 난제였다. 이러한 문제점을 극복하고자 기존 연구들에서는 팔을 움직이기 위해 신호대잡음비가 더 높은 다른 신체 동작을 상상하는 방법을 시도했으나, 의도하고자 하는 팔 뻗기와 인지적 동작 간의 부자연스러운 괴리로 인해 사용자가 장기간 훈련해야 하는 불편함을 초래했다.
따라서 팔을 뻗는 상상을 할 때 어느 방향으로 뻗었는지 예측하는 디코딩 기술은 정확도가 떨어지고 환자가 사용법을 습득하기 어려운 문제점이 있다. 이 문제가 오랫동안 뇌-기계 인터페이스 분야에서 해결해야 할 난제였다.
연구팀은 문제 해결을 위해 사용자의 자연스러운 팔 동작 상상을 공간해상도가 우수한 대뇌 피질 신호(electrocorticogram)로 측정하고, 변분 베이지안 최소제곱(variational Bayesian least square) 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산할 수 있는 디코딩 기술을 처음으로 개발했다.
연구팀의 팔 동작 상상 신호 분석기술은 운동피질을 비롯한 특정 대뇌 영역에 국한되지 않아, 사용자마다 상이할 수 있는 상상 신호와 대뇌 영역 특성을 맞춤형으로 학습해 최적의 계산모델 파라미터 결괏값을 출력할 수 있다.
연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있음을 확인했다.
나아가 계산모델을 분석함으로써 방향 상상에 중요한 대뇌의 시공간적 특성을 밝혔고, 상상하는 인지적 과정이 팔을 실제로 뻗는 과정에 근접할수록 방향 예측정확도가 상당히 더 높아질 수 있음을 연구팀은 확인했다.
연구팀은 지난 2월 인공지능과 유전자 알고리즘 기반 고 정확도 로봇 팔 제어 뇌-기계 인터페이스 선행 연구 결과를 세계적인 학술지 `어플라이드 소프트 컴퓨팅(Applied soft computing)'에 발표한 바 있다. 이번 후속 연구는 그에 기반해 계산 알고리즘 간소화, 로봇 팔 구동 테스트, 환자의 상상 전략 개선 등 실전에 근접한 사용환경을 조성해 실제로 로봇 팔을 구동하고 의도한 방향으로 로봇 팔이 이동하는지 테스트를 진행했고, 네 가지 방향에 대한 의도를 읽어 정확하게 목표물에 도달하는 시연에 성공했다.
연구팀이 개발한 팔 동작 방향 상상 뇌 신호 분석기술은 향후 사지마비 환자를 비롯한 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 향상, 효율성 개선 등에 이바지할 수 있을 것으로 기대된다.
연구책임자 정재승 교수는 "장애인마다 상이한 뇌 신호를 맞춤형으로 분석해 장기간 훈련을 받지 않더라도 로봇 팔을 제어할 수 있는 기술은 혁신적인 결과이며, 이번 기술은 향후 의수를 대신할 로봇팔을 상용화하는 데에도 크게 기여할 것으로 기대된다ˮ고 말했다.
2022.10.24 조회수 10728 -
 생각만으로 정확하게 로봇팔 조종이 가능한 뇌-기계 인터페이스 개발
우리 대학 바이오및뇌공학과 정재승 교수 연구팀이 3차원 공간상에서 생각만으로 로봇팔을 높은 정확도 (90.9~92.6%)로 조종하는 `뇌-기계 인터페이스 시스템'을 개발했다고 23일 밝혔다.
정 교수 연구팀은 인공지능과 유전자 알고리즘을 사용해 인간의 대뇌 심부에서 측정한 뇌파만으로 팔 움직임의 의도를 파악해 로봇팔을 제어하는 새로운 형태의 뇌-기계 인터페이스 시스템을 개발했다. 뇌 활동만으로 사람의 의도를 파악해 로봇이나 기계가 대신 행동에 옮기는 `뇌-기계 인터페이스' 기술은 최근 급속도로 발전하고 있다. 하지만 손을 움직이는 정도의 의도 파악을 넘어, 팔 움직임의 방향에 대한 의도를 섬세하게 파악해 정교하게 로봇팔을 움직이는 기술은 아직 정확도가 높지 않았다.
하지만 연구팀은 이번 연구에서 조종 `방향'에 대한 의도를 뇌 활동만으로 인식하는 인공지능 모델을 개발했고, 그 결과 3차원 공간상에서 24개의 방향을 90% 이상의 정확도로 정교하게 해석하는 시스템을 개발했다.
게다가 딥러닝 등 기존 기계학습 기술은 높은 사양의 GPU 하드웨어가 필요했지만, 이번 연구에서는 축적 컴퓨팅(Reservoir Computing) 기법을 이용해 낮은 사양의 하드웨어에서도 인공지능 학습이 가능하여 스마트 모바일 기기에서도 폭넓게 응용될 수 있도록 개발해, 향후 메타버스와 스마트 기기에도 폭넓게 적용이 가능할 것으로 기대된다.
우리 대학 김훈희 박사(現 강남대 조교수)가 제1 저자로 참여한 이번 연구는 국제학술지 `어플라이드 소프트 컴퓨팅(Applied Soft Computing)' 2022년 117권 3월호에 출판됐다. (논문명 : An electrocorticographic decoder for arm movement for brain-machine interface using an echo state network and Gaussian readout).
뇌-기계 인터페이스는 사용자의 뇌 활동을 통해 의도를 읽고 로봇이나 기계에 전달하는 기술로서 로봇, 드론, 컴퓨터뿐만 아니라 스마트 모바일 기기, 메타버스 등에서의 이용될 차세대 인터페이스 기술로 각광받고 있다.
특히 기존의 인터페이스가 외부 신체 기관을 통해 명령을 간접 전달(버튼, 터치, 제스처 등)해야 하지만 뇌-기계 인터페이스는 명령을 뇌로부터 직접적 전달한다는 점에서 가장 진보된 인터페이스 기술로 여겨진다.
그러나 뇌파는 개개인의 차이가 매우 크고, 단일 신경 세포로부터 정확한 신호를 읽는 것이 아니라 넓은 영역에 있는 신경 세포 집단의 전기적 신호 특성을 해석해야 하므로 잡음이 크다는 한계점을 가지고 있다.
연구팀은 이러한 문제 해결을 위해 최첨단 인공지능 기법의 하나인 `축적 컴퓨팅 기법'을 이용해 뇌-기계 인터페이스에서 필요한 개개인의 뇌파 신호의 중요 특성을 인공신경망이 자동으로 학습해 찾을 수 있도록 구현했다.
또한 유전자 알고리즘(Genetic Algorithm)을 이용해 인공지능 신경망이 최적의 뇌파 특성을 효율적으로 찾을 수 있게 시스템을 설계했다. 연구팀은 심부 뇌파를 최종 해석하는 리드아웃(Readout)을 가우시안(Gaussian) 모델로 설계해 시각피질 신경 세포가 방향을 표현하는 방법을 모방하는 인공신경망을 개발했다. 이런 리드아웃 방식은 축적 컴퓨팅의 선형 학습 알고리즘을 이용해 일반적 사양의 간단한 하드웨어에서도 빠르게 학습할 수 있어 메타버스, 스마트기기 등 일상생활에서 응용이 가능해진다.
특히, 이번 연구에서 만들어진 뇌-기계 인터페이스 인공지능 모델은 3차원상에서 24가지 방향 즉, 각 차원에서 8가지 방향을 디코딩할 수 있으며 모든 방향에서 평균 90% 이상의 정확도 (90.9%~92.6% 범위)를 보였다. 또한 연구된 뇌-기계 인터페이스는 3차원 공간상에서 로봇팔을 움직이는 상상을 할 때의 뇌파를 해석해 성공적으로 로봇팔을 움직이는 시뮬레이션 결과를 보였다.
인공지능 시스템을 만든 제1 저자인 김훈희 박사는 "공학적인 신호처리 기법에 의존해 온 기존 뇌파 디코딩 방법과는 달리, 인간 뇌의 실제 작동 구조를 모방한 인공신경망을 개발해 좀더 발전된 형태의 뇌-기계 인터페이스 시스템을 개발해 기쁘다ˮ면서 "향후 뇌의 특성을 좀 더 구체적으로 이용한 `뇌 모방 인공지능(Brain-inspired A.I.)'을 이용한 다양한 뇌-기계 인터페이스를 개발할 계획이다ˮ라고 말했다.
이번 연구를 주도한 연구책임자 정재승 교수는 "뇌파를 통해 생각만으로 로봇팔을 구동하는 `뇌-기계 인터페이스 시스템'들이 대부분 고사양 하드웨어가 필요해 실시간 응용으로 나아가기 어렵고 스마트기기 등으로 적용이 어려웠다. 그러나 이번 시스템은 90%~92%의 높은 정확도를 가진 의도 인식 인공지능 시스템을 만들어 메타버스 안에서 아바타를 생각대로 움직이게 하거나 앱을 생각만으로 컨트롤하는 스마트기기 등에 광범위하게 사용될 수 있다ˮ고 말했다.
이번 연구 결과는 사지마비 환자나 사고로 팔을 잃은 환자들을 위한 로봇팔 장착 및 제어 기술부터, 메타버스, 스마트기기, 게임, 엔터테인먼트 애플리케이션 등 다양한 시스템에 뇌-기계 인터페이스를 적용할 가능성을 열어 줄 것으로 기대된다.
이번 연구는 한국연구재단 뇌 원천기술개발사업의 지원을 받아 수행됐다.
2022.02.24 조회수 16050
생각만으로 정확하게 로봇팔 조종이 가능한 뇌-기계 인터페이스 개발
우리 대학 바이오및뇌공학과 정재승 교수 연구팀이 3차원 공간상에서 생각만으로 로봇팔을 높은 정확도 (90.9~92.6%)로 조종하는 `뇌-기계 인터페이스 시스템'을 개발했다고 23일 밝혔다.
정 교수 연구팀은 인공지능과 유전자 알고리즘을 사용해 인간의 대뇌 심부에서 측정한 뇌파만으로 팔 움직임의 의도를 파악해 로봇팔을 제어하는 새로운 형태의 뇌-기계 인터페이스 시스템을 개발했다. 뇌 활동만으로 사람의 의도를 파악해 로봇이나 기계가 대신 행동에 옮기는 `뇌-기계 인터페이스' 기술은 최근 급속도로 발전하고 있다. 하지만 손을 움직이는 정도의 의도 파악을 넘어, 팔 움직임의 방향에 대한 의도를 섬세하게 파악해 정교하게 로봇팔을 움직이는 기술은 아직 정확도가 높지 않았다.
하지만 연구팀은 이번 연구에서 조종 `방향'에 대한 의도를 뇌 활동만으로 인식하는 인공지능 모델을 개발했고, 그 결과 3차원 공간상에서 24개의 방향을 90% 이상의 정확도로 정교하게 해석하는 시스템을 개발했다.
게다가 딥러닝 등 기존 기계학습 기술은 높은 사양의 GPU 하드웨어가 필요했지만, 이번 연구에서는 축적 컴퓨팅(Reservoir Computing) 기법을 이용해 낮은 사양의 하드웨어에서도 인공지능 학습이 가능하여 스마트 모바일 기기에서도 폭넓게 응용될 수 있도록 개발해, 향후 메타버스와 스마트 기기에도 폭넓게 적용이 가능할 것으로 기대된다.
우리 대학 김훈희 박사(現 강남대 조교수)가 제1 저자로 참여한 이번 연구는 국제학술지 `어플라이드 소프트 컴퓨팅(Applied Soft Computing)' 2022년 117권 3월호에 출판됐다. (논문명 : An electrocorticographic decoder for arm movement for brain-machine interface using an echo state network and Gaussian readout).
뇌-기계 인터페이스는 사용자의 뇌 활동을 통해 의도를 읽고 로봇이나 기계에 전달하는 기술로서 로봇, 드론, 컴퓨터뿐만 아니라 스마트 모바일 기기, 메타버스 등에서의 이용될 차세대 인터페이스 기술로 각광받고 있다.
특히 기존의 인터페이스가 외부 신체 기관을 통해 명령을 간접 전달(버튼, 터치, 제스처 등)해야 하지만 뇌-기계 인터페이스는 명령을 뇌로부터 직접적 전달한다는 점에서 가장 진보된 인터페이스 기술로 여겨진다.
그러나 뇌파는 개개인의 차이가 매우 크고, 단일 신경 세포로부터 정확한 신호를 읽는 것이 아니라 넓은 영역에 있는 신경 세포 집단의 전기적 신호 특성을 해석해야 하므로 잡음이 크다는 한계점을 가지고 있다.
연구팀은 이러한 문제 해결을 위해 최첨단 인공지능 기법의 하나인 `축적 컴퓨팅 기법'을 이용해 뇌-기계 인터페이스에서 필요한 개개인의 뇌파 신호의 중요 특성을 인공신경망이 자동으로 학습해 찾을 수 있도록 구현했다.
또한 유전자 알고리즘(Genetic Algorithm)을 이용해 인공지능 신경망이 최적의 뇌파 특성을 효율적으로 찾을 수 있게 시스템을 설계했다. 연구팀은 심부 뇌파를 최종 해석하는 리드아웃(Readout)을 가우시안(Gaussian) 모델로 설계해 시각피질 신경 세포가 방향을 표현하는 방법을 모방하는 인공신경망을 개발했다. 이런 리드아웃 방식은 축적 컴퓨팅의 선형 학습 알고리즘을 이용해 일반적 사양의 간단한 하드웨어에서도 빠르게 학습할 수 있어 메타버스, 스마트기기 등 일상생활에서 응용이 가능해진다.
특히, 이번 연구에서 만들어진 뇌-기계 인터페이스 인공지능 모델은 3차원상에서 24가지 방향 즉, 각 차원에서 8가지 방향을 디코딩할 수 있으며 모든 방향에서 평균 90% 이상의 정확도 (90.9%~92.6% 범위)를 보였다. 또한 연구된 뇌-기계 인터페이스는 3차원 공간상에서 로봇팔을 움직이는 상상을 할 때의 뇌파를 해석해 성공적으로 로봇팔을 움직이는 시뮬레이션 결과를 보였다.
인공지능 시스템을 만든 제1 저자인 김훈희 박사는 "공학적인 신호처리 기법에 의존해 온 기존 뇌파 디코딩 방법과는 달리, 인간 뇌의 실제 작동 구조를 모방한 인공신경망을 개발해 좀더 발전된 형태의 뇌-기계 인터페이스 시스템을 개발해 기쁘다ˮ면서 "향후 뇌의 특성을 좀 더 구체적으로 이용한 `뇌 모방 인공지능(Brain-inspired A.I.)'을 이용한 다양한 뇌-기계 인터페이스를 개발할 계획이다ˮ라고 말했다.
이번 연구를 주도한 연구책임자 정재승 교수는 "뇌파를 통해 생각만으로 로봇팔을 구동하는 `뇌-기계 인터페이스 시스템'들이 대부분 고사양 하드웨어가 필요해 실시간 응용으로 나아가기 어렵고 스마트기기 등으로 적용이 어려웠다. 그러나 이번 시스템은 90%~92%의 높은 정확도를 가진 의도 인식 인공지능 시스템을 만들어 메타버스 안에서 아바타를 생각대로 움직이게 하거나 앱을 생각만으로 컨트롤하는 스마트기기 등에 광범위하게 사용될 수 있다ˮ고 말했다.
이번 연구 결과는 사지마비 환자나 사고로 팔을 잃은 환자들을 위한 로봇팔 장착 및 제어 기술부터, 메타버스, 스마트기기, 게임, 엔터테인먼트 애플리케이션 등 다양한 시스템에 뇌-기계 인터페이스를 적용할 가능성을 열어 줄 것으로 기대된다.
이번 연구는 한국연구재단 뇌 원천기술개발사업의 지원을 받아 수행됐다.
2022.02.24 조회수 16050 -
 신경신호 모사를 통한 인공 감각 시스템 개발
우리 대학 바이오및뇌공학과 박성준 교수 연구팀이 고려대학교 천성우 교수, 한양대학교 김종석 박사 공동 연구팀과 함께 인간 피부-신경 모사형 인공 감각 인터페이스 시스템을 개발했다고 12일 밝혔다.
이번 연구 결과는 국제 학술지 `네이처 일렉트로닉스(Nature Electronics)'에 2021년 6월 3일 字로 출판됐다. (논문명: Artificial Neural Tactile Sensing System)
가상/증강 현실, 메타버스, 화상 환자를 위한 인공피부, 로봇형 의수/의족 등에 사용될 수 있는 인공 감각 시스템은, 구현해야 할 원리와 그 시스템의 복잡성 때문에 실제 감각기관처럼 만들기 어려운 상황이었다. 특히 사람은 다양한 유형의 촉각 수용기를 통해 (압력, 진동 등) 정보를 조합하여 촉각을 감지하므로, 완벽한 인공 감각 시스템의 구현은 더욱 어려울 수 밖에 없다.
연구팀은 문제 해결을 위해 나노입자 기반의 복합 촉각 센서를 제작하고, 이를 실제 신경 패턴에 기반한 신호 변환 시스템과 연결하는 방법을 사용하였다. 이 두 가지 기술의 조합을 통해 연구팀은 인간의 촉각 인식 프로세스를 최대로 모방하는 인공 감각 인터페이스 시스템을 구현하는데 성공했다.
연구팀은 우선 압전재료 및 압전 저항성 재료의 조합으로 이루어진 전자 피부를 제작했다. 이 센서는 나노입자의 적절한 조합을 통해 피부 내의 압력을 감지하는 늦은 순응 기계적 수용기(SA mechanoreceptor)와 진동을 감지하는 빠른 순응 기계적 수용기(FA mechanoreceptor)를 동시에 모사할 수 있다는 특징을 가지고 있다. 해당 센서를 통해 생성된 전위는, 연구팀이 제작한 회로 시스템을 통해 실제 감각 신호와 같은 형태의 패턴으로 변환된다. 이때 생체 내 상황을 최대한 모사하기 위해, 실제 감각신경을 추출, 다양한 감각에 의한 신호를 측정하여 함수화하는 방법이 사용됐다.
해당 시스템을 동물 모델에 적용한 결과, 연구팀은 인공 감각 시스템에서 발생한 신호가 생체 내에서 왜곡 없이 전달되며, 근육 반사 작용 등 생체 감각 관련 현상들을 구현할 수 있음을 확인했다. 또한 연구팀은 지문 구조로 만든 감각 시스템을 20여 종의 직물과 접촉함으로써, 딥 러닝 기법을 통해 직물의 질감을 99% 이상 분류할 수 있을 뿐만 아니라 학습된 신호를 기반으로 인간과 동일하게 예측할 수 있음을 보여줬다.
박성준 교수는 "이번 연구는 실제 신경 신호의 패턴 학습을 바탕으로 한 인간 모사형 감각 시스템을 세계 최초로 구현했다는 데 의의가 있다. 해당 연구를 통해 향후 더욱 현실적인 감각 구현이 가능할 뿐만 아니라, 연구에 사용된 생체신호 모사 기법이 인체 내 다양한 종류의 타 감각 시스템과 결합될 경우 더욱 큰 시너지를 낼 수 있으리라 기대한다ˮ 라고 말했다.
한편 이번 연구는 한국연구재단 신진연구사업, 범부처의료기기개발 사업, 나노소재원천기술개발사업, 차세대 지능형 반도체 개발사업, KK-JRC 스마트 프로젝트, KAIST 글로벌 이니셔티브 프로그램, Post-AI 프로젝트 사업의 지원을 받아 수행됐다.
2021.07.12 조회수 15731
신경신호 모사를 통한 인공 감각 시스템 개발
우리 대학 바이오및뇌공학과 박성준 교수 연구팀이 고려대학교 천성우 교수, 한양대학교 김종석 박사 공동 연구팀과 함께 인간 피부-신경 모사형 인공 감각 인터페이스 시스템을 개발했다고 12일 밝혔다.
이번 연구 결과는 국제 학술지 `네이처 일렉트로닉스(Nature Electronics)'에 2021년 6월 3일 字로 출판됐다. (논문명: Artificial Neural Tactile Sensing System)
가상/증강 현실, 메타버스, 화상 환자를 위한 인공피부, 로봇형 의수/의족 등에 사용될 수 있는 인공 감각 시스템은, 구현해야 할 원리와 그 시스템의 복잡성 때문에 실제 감각기관처럼 만들기 어려운 상황이었다. 특히 사람은 다양한 유형의 촉각 수용기를 통해 (압력, 진동 등) 정보를 조합하여 촉각을 감지하므로, 완벽한 인공 감각 시스템의 구현은 더욱 어려울 수 밖에 없다.
연구팀은 문제 해결을 위해 나노입자 기반의 복합 촉각 센서를 제작하고, 이를 실제 신경 패턴에 기반한 신호 변환 시스템과 연결하는 방법을 사용하였다. 이 두 가지 기술의 조합을 통해 연구팀은 인간의 촉각 인식 프로세스를 최대로 모방하는 인공 감각 인터페이스 시스템을 구현하는데 성공했다.
연구팀은 우선 압전재료 및 압전 저항성 재료의 조합으로 이루어진 전자 피부를 제작했다. 이 센서는 나노입자의 적절한 조합을 통해 피부 내의 압력을 감지하는 늦은 순응 기계적 수용기(SA mechanoreceptor)와 진동을 감지하는 빠른 순응 기계적 수용기(FA mechanoreceptor)를 동시에 모사할 수 있다는 특징을 가지고 있다. 해당 센서를 통해 생성된 전위는, 연구팀이 제작한 회로 시스템을 통해 실제 감각 신호와 같은 형태의 패턴으로 변환된다. 이때 생체 내 상황을 최대한 모사하기 위해, 실제 감각신경을 추출, 다양한 감각에 의한 신호를 측정하여 함수화하는 방법이 사용됐다.
해당 시스템을 동물 모델에 적용한 결과, 연구팀은 인공 감각 시스템에서 발생한 신호가 생체 내에서 왜곡 없이 전달되며, 근육 반사 작용 등 생체 감각 관련 현상들을 구현할 수 있음을 확인했다. 또한 연구팀은 지문 구조로 만든 감각 시스템을 20여 종의 직물과 접촉함으로써, 딥 러닝 기법을 통해 직물의 질감을 99% 이상 분류할 수 있을 뿐만 아니라 학습된 신호를 기반으로 인간과 동일하게 예측할 수 있음을 보여줬다.
박성준 교수는 "이번 연구는 실제 신경 신호의 패턴 학습을 바탕으로 한 인간 모사형 감각 시스템을 세계 최초로 구현했다는 데 의의가 있다. 해당 연구를 통해 향후 더욱 현실적인 감각 구현이 가능할 뿐만 아니라, 연구에 사용된 생체신호 모사 기법이 인체 내 다양한 종류의 타 감각 시스템과 결합될 경우 더욱 큰 시너지를 낼 수 있으리라 기대한다ˮ 라고 말했다.
한편 이번 연구는 한국연구재단 신진연구사업, 범부처의료기기개발 사업, 나노소재원천기술개발사업, 차세대 지능형 반도체 개발사업, KK-JRC 스마트 프로젝트, KAIST 글로벌 이니셔티브 프로그램, Post-AI 프로젝트 사업의 지원을 받아 수행됐다.
2021.07.12 조회수 15731 -
 하이드로젤 기반 유연성 뇌-기계 인터페이스 개발
우리 대학 바이오및뇌공학과 박성준 교수 연구팀이 메사추세츠 공과대학(MIT) 폴리나 아니키바(Polina Anikeeva) 교수, 쏸허 자오(Xuanhe Zhao) 교수, 육현우 박사 공동 연구팀과 함께 *하이드로젤 기반의 유연성 뇌-기계 인터페이스를 개발하는 데 성공했다고 21일 밝혔다.
☞ 하이드로젤: 물과 젤리가 합쳐진 합성어이며 주로 필러, 보톡스, 화장품에 쓰이는 반고체 상태의 물질이다. 인공적인 인체 조직을 만드는 원료로 적합해 의학적으로도 널리 쓰인다.
이번 연구 결과는 국제 학술지 `네이처 커뮤니케이션즈(Nature Communications)'에 2021년 6월 8일 字로 출판됐다. (논문명: Adaptive and multifunctional hydrogel hybrid probes for long-term sensing and modulation of neural activity)
뇌 구조를 연구하거나 뇌 신경 질환의 메커니즘을 파악, 치료하기 위해서는, 실시간으로 뇌를 자극하고 신호를 측정할 수 있는 인터페이스의 개발이 필수적이다. 그러나 기존의 신경 인터페이스는 기계적, 화학적 특성이 뇌 조직과 너무 달라서 일어나는 이물 반응(foreign body response) 때문에, 주변에 절연세포층이 형성돼 그 수명이 매우 짧아진다는 문제점을 가지고 있었다.
연구팀은 해당 문제의 해결을 위해, 직접 제작한 다기능성 파이버 다발을 하이드로젤 몸체에 넣는 방법을 이용해 `뇌 모사형 신경 인터페이스'를 제작했다. 해당 장치는 빛으로 특정 신경세포종만을 자극할 수 있는 광유전학 기술을 적용하기 위한 광섬유뿐만 아니라, 뇌에서 신호를 읽을 수 있는 전극 다발, 약물을 뇌 속으로 전달할 수 있는 미세 유체 채널을 모두 보유하고 있다.
해당 인터페이스는 하이드로젤 몸체를 건조시킨 상태에서는 단단한 성질이 고분자와 유사해 몸체에 삽입하기가 쉽다. 하지만 몸에 들어가면 체내의 수분을 빠르게 흡수해. 부드럽고 수분이 풍부한 주변 조직과 유사한 상태가 되므로 이물 반응을 최소화할 수 있다.
연구팀은 이러한 특성을 가진 장치를 동물 모델에 직접 적용해, 기존의 기록을 훨씬 뛰어넘는 삽입 후 6개월까지도 뇌 신호를 측정할 수 있음을 보였다. 또한 자유롭게 움직이는 쥐를 대상으로 초장기간 광유전학 실험, 행동 실험 등이 가능하며, 이물 반응에 의한 아교세포 및 면역세포의 발현이 기존 장치보다 현저히 줄어듦을 증명했다.
박성준 교수는 "이번 연구는 최초로 하이드로젤을 다기능 신경 인터페이스의 구성물질로 사용해 그 수명을 대폭 상승시켰다는 데에 의의가 있으며, 해당 연구를 통해 향후 알츠하이머병, 파킨슨병 등 초장기간 관찰이 필요한 뇌 신경 질환 연구가 더욱 발전할 수 있을 것으로 기대된다ˮ 라고 말했다.
한편 이번 연구는 한국연구재단 신진연구사업, 범부처의료기기개발 사업, 나노소재원천기술개발사업, 차세대 지능형 반도체 개발사업, KK-JRC 스마트 프로젝트, 카이스트 글로벌 이니셔티브 프로그램, 포스트 인공지능(Post-AI) 프로젝트 사업의 지원을 받아 수행됐다.
2021.06.21 조회수 32719
하이드로젤 기반 유연성 뇌-기계 인터페이스 개발
우리 대학 바이오및뇌공학과 박성준 교수 연구팀이 메사추세츠 공과대학(MIT) 폴리나 아니키바(Polina Anikeeva) 교수, 쏸허 자오(Xuanhe Zhao) 교수, 육현우 박사 공동 연구팀과 함께 *하이드로젤 기반의 유연성 뇌-기계 인터페이스를 개발하는 데 성공했다고 21일 밝혔다.
☞ 하이드로젤: 물과 젤리가 합쳐진 합성어이며 주로 필러, 보톡스, 화장품에 쓰이는 반고체 상태의 물질이다. 인공적인 인체 조직을 만드는 원료로 적합해 의학적으로도 널리 쓰인다.
이번 연구 결과는 국제 학술지 `네이처 커뮤니케이션즈(Nature Communications)'에 2021년 6월 8일 字로 출판됐다. (논문명: Adaptive and multifunctional hydrogel hybrid probes for long-term sensing and modulation of neural activity)
뇌 구조를 연구하거나 뇌 신경 질환의 메커니즘을 파악, 치료하기 위해서는, 실시간으로 뇌를 자극하고 신호를 측정할 수 있는 인터페이스의 개발이 필수적이다. 그러나 기존의 신경 인터페이스는 기계적, 화학적 특성이 뇌 조직과 너무 달라서 일어나는 이물 반응(foreign body response) 때문에, 주변에 절연세포층이 형성돼 그 수명이 매우 짧아진다는 문제점을 가지고 있었다.
연구팀은 해당 문제의 해결을 위해, 직접 제작한 다기능성 파이버 다발을 하이드로젤 몸체에 넣는 방법을 이용해 `뇌 모사형 신경 인터페이스'를 제작했다. 해당 장치는 빛으로 특정 신경세포종만을 자극할 수 있는 광유전학 기술을 적용하기 위한 광섬유뿐만 아니라, 뇌에서 신호를 읽을 수 있는 전극 다발, 약물을 뇌 속으로 전달할 수 있는 미세 유체 채널을 모두 보유하고 있다.
해당 인터페이스는 하이드로젤 몸체를 건조시킨 상태에서는 단단한 성질이 고분자와 유사해 몸체에 삽입하기가 쉽다. 하지만 몸에 들어가면 체내의 수분을 빠르게 흡수해. 부드럽고 수분이 풍부한 주변 조직과 유사한 상태가 되므로 이물 반응을 최소화할 수 있다.
연구팀은 이러한 특성을 가진 장치를 동물 모델에 직접 적용해, 기존의 기록을 훨씬 뛰어넘는 삽입 후 6개월까지도 뇌 신호를 측정할 수 있음을 보였다. 또한 자유롭게 움직이는 쥐를 대상으로 초장기간 광유전학 실험, 행동 실험 등이 가능하며, 이물 반응에 의한 아교세포 및 면역세포의 발현이 기존 장치보다 현저히 줄어듦을 증명했다.
박성준 교수는 "이번 연구는 최초로 하이드로젤을 다기능 신경 인터페이스의 구성물질로 사용해 그 수명을 대폭 상승시켰다는 데에 의의가 있으며, 해당 연구를 통해 향후 알츠하이머병, 파킨슨병 등 초장기간 관찰이 필요한 뇌 신경 질환 연구가 더욱 발전할 수 있을 것으로 기대된다ˮ 라고 말했다.
한편 이번 연구는 한국연구재단 신진연구사업, 범부처의료기기개발 사업, 나노소재원천기술개발사업, 차세대 지능형 반도체 개발사업, KK-JRC 스마트 프로젝트, 카이스트 글로벌 이니셔티브 프로그램, 포스트 인공지능(Post-AI) 프로젝트 사업의 지원을 받아 수행됐다.
2021.06.21 조회수 32719 -
 남택진 교수팀, 레드닷 어워드 2021 대상 수상
우리 대학 남택진 산업디자인학과 교수팀이 세계 최대 규모의 디자인 공모전인 독일 ʻ레드닷 디자인 어워드(Red Dot Design Award) 2021ʼ 제품디자인 부문에서 대상(best of the best award)을 받았다. 수상작은 남 교수팀이 개발한 ʻ코로나 중증 환자 치료용 이동형 감염병동(mobile clinic module, MCM)ʼ이다. 올해 공모전에는 60여 개국에서 총 7천8백여 개의 작품이 출품돼 제품 디자인·커뮤니케이션 디자인·콘셉트 디자인 등 3개 분야에서 경쟁을 펼쳤다. 주최 측은 "수상작들이 자동차·로봇·의료 기술·포장에 이르기까지 디자인을 통해 현대 사회가 가진 문제를 해결하고 인류의 생활 수준을 향상하는 데 중요한 역할을 했다ˮ라고 밝혔다. 특히, 남 교수팀의 이동형 감염병동은 "제품 디자인이 감염병 확산을 방지하는 일에 얼마나 가치 있게 기여할 수 있는지를 보여줬다ˮ라고 평가했다.
이동형 감염병동의 쾌거는 이뿐만이 아니다. 레드닷 디자인 어워드(Red Dot Design Award)와 함께 세계 최고 권위의 디자인 공모전으로 손꼽히는 iF 디자인 어워드(International Forum Design Award) 2021에서도 제품·실내건축·사용자인터페이스·사용자경험 등 총 4개 분야에서 본상을 수상했다.
이로써, 남 교수팀의 이동형 음압병동은 국제 권위의 디자인 공모전을 연이어 석권하며 기능성·경제성·효용성뿐만 아니라 독창적 디자인과 심미성까지 갖춘 의료 시설로서 가치를 인정받게 됐다.
이동형 음압병동은 고급 의료 설비를 갖춘 음압 격리 시설로 신속하게 변형하거나 개조해 사용할 수 있도록 디자인됐다. 음압 프레임·에어 텐트·기능 패널 등의 각 모듈을 조합해 단시간 내에 음압 병동이나 선별진료소 등을 구축할 수 있다. 또한, 소규모의 장비와 인력으로도 관리·이송·설치가 가능해 기존의 조립식 병동 대비 경제적·시간적 효율을 높인 것이 가장 큰 특징이다. 남택진 교수팀은 작년 7월부터 KAIST 코로나 대응 과학기술 뉴딜사업(단장 배충식)의 일환으로 이동형 음압병동을 개발했다. 조스리 스튜디오·20Plus 등과 협력해 디자인을 진행했고 신성이엔지가 제작을 담당했다. 배상민(산업디자인학과)·이태식(산업및시스템 공학과)·김형수(기계공학과) 교수 등이 자문했으며, 석현정(산업디자인학과), 박해원·김성수(기계공학과), 한동수(전산학과) 교수 등이 감염병원 서비스 주제로 연구에 참여했다. 현재 한국 원자력의학원·제주도 백신 접종센터에 시제품이 설치돼 코로나 환자 및 백신 접종자들을 대상으로 시범 운영 중이다. 향후, 건양대 병원 등으로 적용 범위를 확대해나갈 예정이다. 디자인 총괄한 남택진 교수는 "현실 세계의 문제를 발견하고 해결하여 책임지는 디자이너가 더 많아지기를 바란다ˮ라고 수상 소감을 전했다. 이어, 남 교수는 "MCM의 생산 효율성과 안정된 운영을 위해 엔지니어링 디자인 측면을 개선하는 연구를 진행 중이며, 빠른 시일 내에 상용화와 수출이 이뤄질 수 있도록 박차를 가할 예정이다ˮ라고 전했다. KAIST 코로나 대응 과학기술 뉴딜사업단은 KAIST의 과학기술 역량을 기반으로 감염 예방·보호·진단·치료 등 감염병의 전 주기에 대응하는 치료 분야에서 산·학·연·병이 협력해 방역 요소기술 개발과 과학기술 기반의 방역 시스템을 구축하는 연구를 수행하고 있다.
2021.04.19 조회수 48091
남택진 교수팀, 레드닷 어워드 2021 대상 수상
우리 대학 남택진 산업디자인학과 교수팀이 세계 최대 규모의 디자인 공모전인 독일 ʻ레드닷 디자인 어워드(Red Dot Design Award) 2021ʼ 제품디자인 부문에서 대상(best of the best award)을 받았다. 수상작은 남 교수팀이 개발한 ʻ코로나 중증 환자 치료용 이동형 감염병동(mobile clinic module, MCM)ʼ이다. 올해 공모전에는 60여 개국에서 총 7천8백여 개의 작품이 출품돼 제품 디자인·커뮤니케이션 디자인·콘셉트 디자인 등 3개 분야에서 경쟁을 펼쳤다. 주최 측은 "수상작들이 자동차·로봇·의료 기술·포장에 이르기까지 디자인을 통해 현대 사회가 가진 문제를 해결하고 인류의 생활 수준을 향상하는 데 중요한 역할을 했다ˮ라고 밝혔다. 특히, 남 교수팀의 이동형 감염병동은 "제품 디자인이 감염병 확산을 방지하는 일에 얼마나 가치 있게 기여할 수 있는지를 보여줬다ˮ라고 평가했다.
이동형 감염병동의 쾌거는 이뿐만이 아니다. 레드닷 디자인 어워드(Red Dot Design Award)와 함께 세계 최고 권위의 디자인 공모전으로 손꼽히는 iF 디자인 어워드(International Forum Design Award) 2021에서도 제품·실내건축·사용자인터페이스·사용자경험 등 총 4개 분야에서 본상을 수상했다.
이로써, 남 교수팀의 이동형 음압병동은 국제 권위의 디자인 공모전을 연이어 석권하며 기능성·경제성·효용성뿐만 아니라 독창적 디자인과 심미성까지 갖춘 의료 시설로서 가치를 인정받게 됐다.
이동형 음압병동은 고급 의료 설비를 갖춘 음압 격리 시설로 신속하게 변형하거나 개조해 사용할 수 있도록 디자인됐다. 음압 프레임·에어 텐트·기능 패널 등의 각 모듈을 조합해 단시간 내에 음압 병동이나 선별진료소 등을 구축할 수 있다. 또한, 소규모의 장비와 인력으로도 관리·이송·설치가 가능해 기존의 조립식 병동 대비 경제적·시간적 효율을 높인 것이 가장 큰 특징이다. 남택진 교수팀은 작년 7월부터 KAIST 코로나 대응 과학기술 뉴딜사업(단장 배충식)의 일환으로 이동형 음압병동을 개발했다. 조스리 스튜디오·20Plus 등과 협력해 디자인을 진행했고 신성이엔지가 제작을 담당했다. 배상민(산업디자인학과)·이태식(산업및시스템 공학과)·김형수(기계공학과) 교수 등이 자문했으며, 석현정(산업디자인학과), 박해원·김성수(기계공학과), 한동수(전산학과) 교수 등이 감염병원 서비스 주제로 연구에 참여했다. 현재 한국 원자력의학원·제주도 백신 접종센터에 시제품이 설치돼 코로나 환자 및 백신 접종자들을 대상으로 시범 운영 중이다. 향후, 건양대 병원 등으로 적용 범위를 확대해나갈 예정이다. 디자인 총괄한 남택진 교수는 "현실 세계의 문제를 발견하고 해결하여 책임지는 디자이너가 더 많아지기를 바란다ˮ라고 수상 소감을 전했다. 이어, 남 교수는 "MCM의 생산 효율성과 안정된 운영을 위해 엔지니어링 디자인 측면을 개선하는 연구를 진행 중이며, 빠른 시일 내에 상용화와 수출이 이뤄질 수 있도록 박차를 가할 예정이다ˮ라고 전했다. KAIST 코로나 대응 과학기술 뉴딜사업단은 KAIST의 과학기술 역량을 기반으로 감염 예방·보호·진단·치료 등 감염병의 전 주기에 대응하는 치료 분야에서 산·학·연·병이 협력해 방역 요소기술 개발과 과학기술 기반의 방역 시스템을 구축하는 연구를 수행하고 있다.
2021.04.19 조회수 48091 -
 신인식 교수, 스마트폰 기반 터치사운드 위치파악 기술 개발
〈 왼쪽부터 아니쉬 뱐잔카 석사과정, 김효수 연구교수, 신인식 교수 〉
1분 1초가 소중한 아침 출근 준비 시간, 거울을 보며 양치질을 하는 시간은 유일하게 멍하니 다른 생각을 할 수 있는 순간일 것이다. 만약 양치질 중 거울을 바라보는 것만으로 오늘의 중요한 뉴스, 궁금했던 유튜브 영상, 날씨 등을 미리 확인할 수 있다면 하루를 계획하는 데 큰 도움이 될 것이다.
우리 대학 전산학부 신인식 교수, 김효수 연구교수 연구팀이 가구, 거울 등의 주변 사물들을 터치 입력 도구로 사용할 수 있는 스마트폰 기반의 터치 사운드 위치파악 기술을 개발했다.
이 기술은 사람들이 항상 휴대하는 스마트폰, 태블릿 PC 등을 사용한 기술로, 언제 어디서나 책상 등의 주변 사물들을 가상 키보드로 활용해 장문의 문자, 메일 등을 손쉽게 작성할 수 있고 체스와 같은 보드게임도 즐길 수 있다.
또한 단순 디스플레이 기능만 제공하던 스마트 TV나 거울과 같은 스마트기기에 터치 입력 기능을 삽입해 좀 더 편리하고 효율적인 기기 활용을 할 수 있다.
연구팀이 개발한 시스템은 지난 11월 4~7일 중국 선전에서 열린 모바일 및 센싱 분야의 최고 권위 국제학회 ACM SenSys에서 발표돼 호평을 받았으며, 우수성을 인정받아 ‘베스트 페이퍼 러너-업 어워드(best paper runner-up award)’를 수상했다.
터치 사운드 기반 입력 기술은 다양한 사용 환경에서도 1cm 이내의 오차를 갖는 정확한 터치 입력을 일관성 있게 제공하는 것이 가장 중요하다. 사용자들은 책상, 벽, 거울 등 매번 다른 재질의 사물을 터치 입력 도구로 활용할 수 있어야 하고, 사용 중에도 책이나 가방과 같은 주변 물체의 위치 및 소음 수준이 바뀔 수 있기 때문이다.
연구팀은 사용자가 손톱 등으로 사물을 터치했을 때 발생하는 터치 충돌 소리가 고체 표면을 통해 전달되는 과정을 분석했다.
소리가 공기를 통해 전달될 때와는 달리 고체 표면에 전달될 때에는 주파수에 따라 다른 속도로 전달되는 분산(dispersion) 현상을 겪는다. 분산 현상으로 인해 주파수별로 소리 도달 시간 차이는 소리 전달 거리에 비례해 증가하며, 주변 소음이 변화해도 비례 관계는 변하지 않는다.
김효수 연구교수는 이러한 관찰에 기반해 고체 표면을 통해 전달된 터치 소리를 스마트폰에 녹음하고 간단한 조정 과정을 통해 주파수별 소리 도달 시간 차이와 소리 전달 거리의 관계를 파악했다. 이후 이 값을 이용해 사용자의 터치 입력 위치를 정확하게 계산하는 기술을 개발했다.
개발한 시스템은 약 17인치의 터치스크린에서 평균 0.4cm 이내의 측정 오차를 보였다. 특히 나무 책상, 유리 거울, 아크릴 보드 등 다양한 종류의 사물에서 주변 물체의 위치나 소음이 변하는 상황에서도 항상 1cm 이내의 측정 오차를 기록하는 정확성을 보였다.
특히 기존 기술이 터치 입력 위치파악에만 수백 초 소요되는 것과 달리 정확성과 편리한 사용을 위해 약 10초 이내의 간단한 조정을 통해 기술을 적용하는 데 성공했다. 연구팀은 실제 사용자를 대상으로 한 실험에서도 사용자 경험 및 정확성 등 모든 지표에서 긍정적인 반응을 얻었다고 밝혔다.
신 교수는 “우리가 주위에서 흔히 볼 수 있는 거울, 책상, 벽 등의 표면을 마치 터치스크린처럼 사용할 수 있다면 재미있고 유용한 앱들이 많이 활성화될 것이다”라며 “이 기술은 마이크로폰 3~4개 설치만으로도 터치 입력을 가능하게 하는 새로운 터치 인터페이스 기술이다”라고 말했다.
이번 연구는 Microsoft Research Asia(마이크로소프트연구소 아시아)의 지원을 받아 수행됐다.
※ 데모 비디오 링크
http://cps.kaist.ac.kr/research/ubitap/ubitap_demo.mp4
□ 사진 설명
사진1. 터치 입력 기술 사용 예제
2018.12.13 조회수 14521
신인식 교수, 스마트폰 기반 터치사운드 위치파악 기술 개발
〈 왼쪽부터 아니쉬 뱐잔카 석사과정, 김효수 연구교수, 신인식 교수 〉
1분 1초가 소중한 아침 출근 준비 시간, 거울을 보며 양치질을 하는 시간은 유일하게 멍하니 다른 생각을 할 수 있는 순간일 것이다. 만약 양치질 중 거울을 바라보는 것만으로 오늘의 중요한 뉴스, 궁금했던 유튜브 영상, 날씨 등을 미리 확인할 수 있다면 하루를 계획하는 데 큰 도움이 될 것이다.
우리 대학 전산학부 신인식 교수, 김효수 연구교수 연구팀이 가구, 거울 등의 주변 사물들을 터치 입력 도구로 사용할 수 있는 스마트폰 기반의 터치 사운드 위치파악 기술을 개발했다.
이 기술은 사람들이 항상 휴대하는 스마트폰, 태블릿 PC 등을 사용한 기술로, 언제 어디서나 책상 등의 주변 사물들을 가상 키보드로 활용해 장문의 문자, 메일 등을 손쉽게 작성할 수 있고 체스와 같은 보드게임도 즐길 수 있다.
또한 단순 디스플레이 기능만 제공하던 스마트 TV나 거울과 같은 스마트기기에 터치 입력 기능을 삽입해 좀 더 편리하고 효율적인 기기 활용을 할 수 있다.
연구팀이 개발한 시스템은 지난 11월 4~7일 중국 선전에서 열린 모바일 및 센싱 분야의 최고 권위 국제학회 ACM SenSys에서 발표돼 호평을 받았으며, 우수성을 인정받아 ‘베스트 페이퍼 러너-업 어워드(best paper runner-up award)’를 수상했다.
터치 사운드 기반 입력 기술은 다양한 사용 환경에서도 1cm 이내의 오차를 갖는 정확한 터치 입력을 일관성 있게 제공하는 것이 가장 중요하다. 사용자들은 책상, 벽, 거울 등 매번 다른 재질의 사물을 터치 입력 도구로 활용할 수 있어야 하고, 사용 중에도 책이나 가방과 같은 주변 물체의 위치 및 소음 수준이 바뀔 수 있기 때문이다.
연구팀은 사용자가 손톱 등으로 사물을 터치했을 때 발생하는 터치 충돌 소리가 고체 표면을 통해 전달되는 과정을 분석했다.
소리가 공기를 통해 전달될 때와는 달리 고체 표면에 전달될 때에는 주파수에 따라 다른 속도로 전달되는 분산(dispersion) 현상을 겪는다. 분산 현상으로 인해 주파수별로 소리 도달 시간 차이는 소리 전달 거리에 비례해 증가하며, 주변 소음이 변화해도 비례 관계는 변하지 않는다.
김효수 연구교수는 이러한 관찰에 기반해 고체 표면을 통해 전달된 터치 소리를 스마트폰에 녹음하고 간단한 조정 과정을 통해 주파수별 소리 도달 시간 차이와 소리 전달 거리의 관계를 파악했다. 이후 이 값을 이용해 사용자의 터치 입력 위치를 정확하게 계산하는 기술을 개발했다.
개발한 시스템은 약 17인치의 터치스크린에서 평균 0.4cm 이내의 측정 오차를 보였다. 특히 나무 책상, 유리 거울, 아크릴 보드 등 다양한 종류의 사물에서 주변 물체의 위치나 소음이 변하는 상황에서도 항상 1cm 이내의 측정 오차를 기록하는 정확성을 보였다.
특히 기존 기술이 터치 입력 위치파악에만 수백 초 소요되는 것과 달리 정확성과 편리한 사용을 위해 약 10초 이내의 간단한 조정을 통해 기술을 적용하는 데 성공했다. 연구팀은 실제 사용자를 대상으로 한 실험에서도 사용자 경험 및 정확성 등 모든 지표에서 긍정적인 반응을 얻었다고 밝혔다.
신 교수는 “우리가 주위에서 흔히 볼 수 있는 거울, 책상, 벽 등의 표면을 마치 터치스크린처럼 사용할 수 있다면 재미있고 유용한 앱들이 많이 활성화될 것이다”라며 “이 기술은 마이크로폰 3~4개 설치만으로도 터치 입력을 가능하게 하는 새로운 터치 인터페이스 기술이다”라고 말했다.
이번 연구는 Microsoft Research Asia(마이크로소프트연구소 아시아)의 지원을 받아 수행됐다.
※ 데모 비디오 링크
http://cps.kaist.ac.kr/research/ubitap/ubitap_demo.mp4
□ 사진 설명
사진1. 터치 입력 기술 사용 예제
2018.12.13 조회수 14521 -
 강정구 교수, 급속충전 가능한 하이브리드 에너지 저장소자 개발
〈 강 정 구 교수〉
우리 대학 EEWS대학원/신소재공학과 강정구 교수 연구팀이 다공성 금속 산화물 나노입자와 그래핀을 이용해 고성능, 고안정성을 갖는 물 기반 하이브리드 에너지 저장 소자를 개발했다.
이 하이브리드 소자는 기존 배터리에 비해 100배 이상 빠른 출력 밀도를 보이며 수십 초 내로 급속 충전이 가능해 소형의 휴대용 전자기기 등에 활용될 수 있을 것으로 기대된다.
강원대학교 정형모 교수 연구팀과 공동으로 진행된 이번 연구 결과는 재료 분야 국제 학술지 ‘어드밴스드 펑셔널 머티리얼즈(Advanced Functional Materials)’ 8월 15일자에 온라인 판에 게재됐다.
리튬 이온 배터리를 비롯한 기존 유계 에너지 저장 소자는 넓은 전압 범위와 높은 에너지 밀도를 갖지만 유기 전해질의 사용에 따른 화재 등의 안전 문제가 뒤따른다. 또한 전기화학적 반응 속도가 느리기 때문에 소자를 충전하는데 긴 시간이 필요하고 사이클이 짧다는 한계가 있다.
이에 반해 수계 전해질 기반 에너지 저장 소자는 안전하고 친환경적 소자로써 주목받고 있다. 하지만 제한된 전압 범위와 낮은 용량으로 인해 유계 기반 소자에 비해 에너지 밀도가 낮은 단점을 가지고 있다.
연구팀은 금속 산화물과 그래핀을 결합한 뒤 수계 기반 전해질을 사용해 높은 에너지 밀도, 고출력, 우수
한 사이클 특성을 갖는 에너지 저장 전극을 개발했다.
이번 연구에서 개발한 다공성의 금속 산화물 나노 입자는 2~3 나노미터 크기의 나노 클러스터로 이루어져 있으며 5 나노미터 이하의 메조 기공이 다량으로 형성돼 있다. 이러한 다공성 구조에서는 이온이 물질 표면으로 빠르게 전달되며 작은 입자크기와 넓은 표면적에 의해 짧은 시간 동안 많은 수의 이온이 금속 산화물 입자 내부에 저장된다.
연구팀은 철과 망간, 두 종류의 다공성 금속 산화물을 양극과 음극에 각각 적용해 2V의 넓은 전압 범위에서 작동 가능한 수계 전해질 기반 하이브리드 소자를 구현했다.
강 교수는 “다공성의 금속 산화물 전극이 가진 기존 기술 이상의 고용량, 고출력 특성은 새로운 개념의 에너지 저장장치의 상용화에 기여할 것이다”며 “수십 초 내의 급속 충전이 가능하기 때문에 휴대폰, 전기자동차 등의 주전원이나 태양에너지를 전기로 직접 저장해 플렉서블 기기에 적용될 수 있을 것이다”고 말했다.
이번 연구는 과학기술정보통신부 글로벌프론티어사업의 하이브리드인터페이스기반 미래소재연구단(단장 김광호)의 지원을 받아 수행됐다.
□ 그림설명
그래핀 위에 형성된 다공성 금속 산화물 나노입자 전극의 수계 이온 저장 특성을 나타낸 이미지
2018.08.27 조회수 15156
강정구 교수, 급속충전 가능한 하이브리드 에너지 저장소자 개발
〈 강 정 구 교수〉
우리 대학 EEWS대학원/신소재공학과 강정구 교수 연구팀이 다공성 금속 산화물 나노입자와 그래핀을 이용해 고성능, 고안정성을 갖는 물 기반 하이브리드 에너지 저장 소자를 개발했다.
이 하이브리드 소자는 기존 배터리에 비해 100배 이상 빠른 출력 밀도를 보이며 수십 초 내로 급속 충전이 가능해 소형의 휴대용 전자기기 등에 활용될 수 있을 것으로 기대된다.
강원대학교 정형모 교수 연구팀과 공동으로 진행된 이번 연구 결과는 재료 분야 국제 학술지 ‘어드밴스드 펑셔널 머티리얼즈(Advanced Functional Materials)’ 8월 15일자에 온라인 판에 게재됐다.
리튬 이온 배터리를 비롯한 기존 유계 에너지 저장 소자는 넓은 전압 범위와 높은 에너지 밀도를 갖지만 유기 전해질의 사용에 따른 화재 등의 안전 문제가 뒤따른다. 또한 전기화학적 반응 속도가 느리기 때문에 소자를 충전하는데 긴 시간이 필요하고 사이클이 짧다는 한계가 있다.
이에 반해 수계 전해질 기반 에너지 저장 소자는 안전하고 친환경적 소자로써 주목받고 있다. 하지만 제한된 전압 범위와 낮은 용량으로 인해 유계 기반 소자에 비해 에너지 밀도가 낮은 단점을 가지고 있다.
연구팀은 금속 산화물과 그래핀을 결합한 뒤 수계 기반 전해질을 사용해 높은 에너지 밀도, 고출력, 우수
한 사이클 특성을 갖는 에너지 저장 전극을 개발했다.
이번 연구에서 개발한 다공성의 금속 산화물 나노 입자는 2~3 나노미터 크기의 나노 클러스터로 이루어져 있으며 5 나노미터 이하의 메조 기공이 다량으로 형성돼 있다. 이러한 다공성 구조에서는 이온이 물질 표면으로 빠르게 전달되며 작은 입자크기와 넓은 표면적에 의해 짧은 시간 동안 많은 수의 이온이 금속 산화물 입자 내부에 저장된다.
연구팀은 철과 망간, 두 종류의 다공성 금속 산화물을 양극과 음극에 각각 적용해 2V의 넓은 전압 범위에서 작동 가능한 수계 전해질 기반 하이브리드 소자를 구현했다.
강 교수는 “다공성의 금속 산화물 전극이 가진 기존 기술 이상의 고용량, 고출력 특성은 새로운 개념의 에너지 저장장치의 상용화에 기여할 것이다”며 “수십 초 내의 급속 충전이 가능하기 때문에 휴대폰, 전기자동차 등의 주전원이나 태양에너지를 전기로 직접 저장해 플렉서블 기기에 적용될 수 있을 것이다”고 말했다.
이번 연구는 과학기술정보통신부 글로벌프론티어사업의 하이브리드인터페이스기반 미래소재연구단(단장 김광호)의 지원을 받아 수행됐다.
□ 그림설명
그래핀 위에 형성된 다공성 금속 산화물 나노입자 전극의 수계 이온 저장 특성을 나타낸 이미지
2018.08.27 조회수 15156