-
 코로나19 재난지원금은 지역경제를 활성화시켰는가?
코로나19 팬데믹으로 어려움을 겪고 있던 지역 소상공인들을 지원하기 위해 시행된 재난지원금이 실제로 지역 경제에 긍정적인 영향을 미쳤는지 우리 연구진이 분석했다. 분석 결과, 소상공인 매출 증가는 지역 내 소비 확산으로 이어져 지역 상권에도 긍정적인 영향을 주었음을 밝혀냈다.
우리 대학 기술경영학부의 김지희 교수팀이 코로나19 재난지원금이 소상공인 매출에 미친 영향을 실증적으로 분석했다고 16일 밝혔다.
연구진은 경기도와 인천이 서로 다른 정책을 추진했다는 점에 착안하여 연구를 진행했다. 경기도는 코로나19 초기인 2020년 4월부터 모든 주민에게 재난지원금을 지급했고, 해당 금액은 오직 지역 소상공인 가게에서만 사용할 수 있도록 제한됐다. 반면, 인천은 같은 시기에 재난지원금을 지급하지 않았다.
연구 결과, 인천과 비교하여 경기도에서는 소상공인 매출이 재난지원금 지급 후 첫 5주 동안 약 4.5% 증가했으며, 소상공인 총매출 증가분은 재난지원금으로 지급된 예산의 1.09배에 달했다고 밝혔다.
구체적으로 연구진은 경기도와 인천이라는 두 지역의 소상공인 매출 데이터*를 활용해, 재난지원금이 지급된 경기 지역에서 소상공인 매출 증대 효과가 어떻게 나타났는지 파악했다.
*매출 데이터: 한국신용데이터(Korea Credit Data)의 2020년 시군구별 주간 소상공인 매출 정보를 기반으로 하며, 이는 경기와 인천 지역의 40,000여 소상공인 업장에서 발생한 거래 데이터를 포함해, 지역별 경제 회복의 차이를 구체적으로 파악하는 데 기여함
분석 결과, 재난지원금 지급 이후 첫 5주 동안 경기도 내 소상공인 매출은 인천 대비 4.5% 증가했고, 이후 재난지원금 소비 기한이 다가오면서 그 영향은 서서히 감소하는 추세를 보였다. 이는 재난지원금이 소비자들에게 단기적인 소비 촉진 효과를 일으켰지만, 그 효과가 지속되지는 않았음을 의미한다.
하지만 재난지원금 사용 종료 시점에서 경기도 소상공인 매출의 총 증가분은 재난지원금으로 지급된 예산보다 9% 많은 것으로 나타나, 해당 재난지원금 정책이 지역 경제 활성화에 효과적으로 기여한 것으로 평가할 수 있다.
또한 이러한 재난지원금의 경기 활성화 효과는 경기도 내에서 지역별 소득 수준이나 구매력의 차이와는 관계없이 동일하게 나타났다.
김지희 교수는 “코로나19 재난지원금을 시민들에게 현금으로 지급한 미국, 싱가포르 등과 달리 우리나라는 소상공인 업장에서만 재난지원금을 사용하게 함으로써, 가계와 지역경제를 살리는 두 가지 목적을 한 번에 달성할 수 있었다”며, “이번 연구는 정책 설계에 있어 지역 경제 활성화를 위한 맞춤형 재정정책의 중요성을 강조하며, 재난 상황에서 소상공인과 지역 경제를 지원하기 위한 최적의 정책 방안을 도출하는 데 기여할 수 있다”고 말했다.
이번 연구는 경영대학 기술경영학부 이수상 박사가 제 1저자로 참여하였고, 저널 `경제 분석과 정책(Economic Analysis and Policy)'에 8월 24일자 온라인으로 게재되었다.
(논문명: Can stimulus checks to households save the local economy? The impact of South Korea`s COVID-19 stimulus on small business sales, 경기 부양을 위한 가계지원금이 지역 경제를 살릴 수 있을까? 한국의 코로나19 재난지원금이 소상공인 매출에 미친 영향)
논문링크: https://www.sciencedirect.com/science/article/pii/S0313592624002091
코로나19 재난지원금은 지역경제를 활성화시켰는가?
코로나19 팬데믹으로 어려움을 겪고 있던 지역 소상공인들을 지원하기 위해 시행된 재난지원금이 실제로 지역 경제에 긍정적인 영향을 미쳤는지 우리 연구진이 분석했다. 분석 결과, 소상공인 매출 증가는 지역 내 소비 확산으로 이어져 지역 상권에도 긍정적인 영향을 주었음을 밝혀냈다.
우리 대학 기술경영학부의 김지희 교수팀이 코로나19 재난지원금이 소상공인 매출에 미친 영향을 실증적으로 분석했다고 16일 밝혔다.
연구진은 경기도와 인천이 서로 다른 정책을 추진했다는 점에 착안하여 연구를 진행했다. 경기도는 코로나19 초기인 2020년 4월부터 모든 주민에게 재난지원금을 지급했고, 해당 금액은 오직 지역 소상공인 가게에서만 사용할 수 있도록 제한됐다. 반면, 인천은 같은 시기에 재난지원금을 지급하지 않았다.
연구 결과, 인천과 비교하여 경기도에서는 소상공인 매출이 재난지원금 지급 후 첫 5주 동안 약 4.5% 증가했으며, 소상공인 총매출 증가분은 재난지원금으로 지급된 예산의 1.09배에 달했다고 밝혔다.
구체적으로 연구진은 경기도와 인천이라는 두 지역의 소상공인 매출 데이터*를 활용해, 재난지원금이 지급된 경기 지역에서 소상공인 매출 증대 효과가 어떻게 나타났는지 파악했다.
*매출 데이터: 한국신용데이터(Korea Credit Data)의 2020년 시군구별 주간 소상공인 매출 정보를 기반으로 하며, 이는 경기와 인천 지역의 40,000여 소상공인 업장에서 발생한 거래 데이터를 포함해, 지역별 경제 회복의 차이를 구체적으로 파악하는 데 기여함
분석 결과, 재난지원금 지급 이후 첫 5주 동안 경기도 내 소상공인 매출은 인천 대비 4.5% 증가했고, 이후 재난지원금 소비 기한이 다가오면서 그 영향은 서서히 감소하는 추세를 보였다. 이는 재난지원금이 소비자들에게 단기적인 소비 촉진 효과를 일으켰지만, 그 효과가 지속되지는 않았음을 의미한다.
하지만 재난지원금 사용 종료 시점에서 경기도 소상공인 매출의 총 증가분은 재난지원금으로 지급된 예산보다 9% 많은 것으로 나타나, 해당 재난지원금 정책이 지역 경제 활성화에 효과적으로 기여한 것으로 평가할 수 있다.
또한 이러한 재난지원금의 경기 활성화 효과는 경기도 내에서 지역별 소득 수준이나 구매력의 차이와는 관계없이 동일하게 나타났다.
김지희 교수는 “코로나19 재난지원금을 시민들에게 현금으로 지급한 미국, 싱가포르 등과 달리 우리나라는 소상공인 업장에서만 재난지원금을 사용하게 함으로써, 가계와 지역경제를 살리는 두 가지 목적을 한 번에 달성할 수 있었다”며, “이번 연구는 정책 설계에 있어 지역 경제 활성화를 위한 맞춤형 재정정책의 중요성을 강조하며, 재난 상황에서 소상공인과 지역 경제를 지원하기 위한 최적의 정책 방안을 도출하는 데 기여할 수 있다”고 말했다.
이번 연구는 경영대학 기술경영학부 이수상 박사가 제 1저자로 참여하였고, 저널 `경제 분석과 정책(Economic Analysis and Policy)'에 8월 24일자 온라인으로 게재되었다.
(논문명: Can stimulus checks to households save the local economy? The impact of South Korea`s COVID-19 stimulus on small business sales, 경기 부양을 위한 가계지원금이 지역 경제를 살릴 수 있을까? 한국의 코로나19 재난지원금이 소상공인 매출에 미친 영향)
논문링크: https://www.sciencedirect.com/science/article/pii/S0313592624002091
2024.10.16
조회수 1337
-
 세계 최대 규모의 3차원 암 게놈 지도 구축
우리 대학 생명과학과 정인경 교수가 한국생명공학연구원 국가생명연구자원정보센터(KOBIC) 이병욱 박사 연구팀과 공동연구를 통해 전 세계 최대 규모의 3차원 암 게놈 지도 데이터베이스를 구축해 공개했다고 28일 밝혔다. (데이터베이스 주소: 3div.kr)
공동연구팀은 인체 정상 조직과 암 조직, 그리고 다양한 세포주 대상 3차원 게놈 지도를 분석 및 데이터베이스화 해, 약 400여 종 이상의 3차원 인간 게놈 지도를 구축했으며, 이를 통해 암세포에서 빈번하게 발생하는 대규모 유전체 구조 변이(structural variation)의 기능을 해독할 수 있는 신규 전략을 제시했다.
정인경 교수, 이병욱 박사가 공동 교신 저자로 참여한 이번 연구 결과는 국제 학술지 `핵산 연구(Nucleic Acid Research)' 저널 11월 27일 字 온라인판에 게재됐다. (논문명 : 3DIV update for 2021: a comprehensive resource of 3D genome and 3D cancer genome)
현재까지 많은 연구를 통해 암세포 유전체에서 발생하는 돌연변이를 규명해 암의 발병 기전을 이해하려는 시도가 있었다. 최근에는 유전자에서 발생하는 점 돌연변이뿐 아니라 대규모 구조 변이에 관한 연구가 활발하게 이루어지고 있으며, 이들을 활용한 신규 암세포의 특이적 유전자 발현 조절 기전 규명의 중요성이 제시되고 있다.
하지만, 대다수의 구조 변이는 DNA가 단백질을 생성하지 않는 비 전사 지역에 존재해, 1차원적 게놈 서열 분석만으로 이들의 기능을 규명하는 데는 한계가 있었다.
한편 지난 10년간 비약적으로 발전한 3차원 게놈 구조 연구는 비 전사 지역에 존재하는 대규모 구조 변이로 인해 생성되거나 소실되는 염색질 고리 구조(chromatin loop)를 3차원 게놈 구조 해독을 통해 규명하면 유전자 조절 기능을 해독할 수 있다는 모델을 제시하고 있다.
이에 정인경 교수 연구팀은 지금까지 공개된 모든 암 유전체의 3차원 게놈 지도를 확보해 전 세계 최대 규모의 3차원 암 유전체 지도를 작성했다. 그리고 대규모 구조 변이와 3차원 게놈 지도를 연결할 수 있는 분석 도구들을 개발했다. 그 결과 연구팀은 대규모 암 유전체 구조 변이에 따른 3차원 게놈 구조의 변화 그리고 이들의 표적 유전자를 규명할 수 있었다.
공동 교신 저자 이병욱 박사는 "최근 세포 내 3차원 게놈 구조 변화가 다양한 질병, 특히 암의 원인이 된다는 것이 밝혀지고 있는데, 이번 연구를 통해 이를 연구할 수 있는 도구들을 세계 최초로 개발했다ˮ라며 "이번 연구 결과를 활용하면 암의 발병 원리를 이해하고 더 나아가 항암제 개발에도 중요한 정보를 제공할 것으로 기대된다ˮ라고 말했다.
정인경 교수는 "암에서 빈번하게 발생하는 대규모 구조 변이의 기능을 3차원 게놈 구조 해독을 통해 정밀하게 규명 가능함을 보여줬다ˮ라며 "이번 연구 결과는 아직 해독이 완벽하게 이루어지고 있지 않은 암 유전체를 정밀하게 해독하는 기술을 한 단계 더 발전시키는 계기가 될 것이다”라고 말했다.
이번 연구는 한국연구재단 기반산업화 인프라 그리고 서경배과학재단의 지원을 통해 수행됐다.
세계 최대 규모의 3차원 암 게놈 지도 구축
우리 대학 생명과학과 정인경 교수가 한국생명공학연구원 국가생명연구자원정보센터(KOBIC) 이병욱 박사 연구팀과 공동연구를 통해 전 세계 최대 규모의 3차원 암 게놈 지도 데이터베이스를 구축해 공개했다고 28일 밝혔다. (데이터베이스 주소: 3div.kr)
공동연구팀은 인체 정상 조직과 암 조직, 그리고 다양한 세포주 대상 3차원 게놈 지도를 분석 및 데이터베이스화 해, 약 400여 종 이상의 3차원 인간 게놈 지도를 구축했으며, 이를 통해 암세포에서 빈번하게 발생하는 대규모 유전체 구조 변이(structural variation)의 기능을 해독할 수 있는 신규 전략을 제시했다.
정인경 교수, 이병욱 박사가 공동 교신 저자로 참여한 이번 연구 결과는 국제 학술지 `핵산 연구(Nucleic Acid Research)' 저널 11월 27일 字 온라인판에 게재됐다. (논문명 : 3DIV update for 2021: a comprehensive resource of 3D genome and 3D cancer genome)
현재까지 많은 연구를 통해 암세포 유전체에서 발생하는 돌연변이를 규명해 암의 발병 기전을 이해하려는 시도가 있었다. 최근에는 유전자에서 발생하는 점 돌연변이뿐 아니라 대규모 구조 변이에 관한 연구가 활발하게 이루어지고 있으며, 이들을 활용한 신규 암세포의 특이적 유전자 발현 조절 기전 규명의 중요성이 제시되고 있다.
하지만, 대다수의 구조 변이는 DNA가 단백질을 생성하지 않는 비 전사 지역에 존재해, 1차원적 게놈 서열 분석만으로 이들의 기능을 규명하는 데는 한계가 있었다.
한편 지난 10년간 비약적으로 발전한 3차원 게놈 구조 연구는 비 전사 지역에 존재하는 대규모 구조 변이로 인해 생성되거나 소실되는 염색질 고리 구조(chromatin loop)를 3차원 게놈 구조 해독을 통해 규명하면 유전자 조절 기능을 해독할 수 있다는 모델을 제시하고 있다.
이에 정인경 교수 연구팀은 지금까지 공개된 모든 암 유전체의 3차원 게놈 지도를 확보해 전 세계 최대 규모의 3차원 암 유전체 지도를 작성했다. 그리고 대규모 구조 변이와 3차원 게놈 지도를 연결할 수 있는 분석 도구들을 개발했다. 그 결과 연구팀은 대규모 암 유전체 구조 변이에 따른 3차원 게놈 구조의 변화 그리고 이들의 표적 유전자를 규명할 수 있었다.
공동 교신 저자 이병욱 박사는 "최근 세포 내 3차원 게놈 구조 변화가 다양한 질병, 특히 암의 원인이 된다는 것이 밝혀지고 있는데, 이번 연구를 통해 이를 연구할 수 있는 도구들을 세계 최초로 개발했다ˮ라며 "이번 연구 결과를 활용하면 암의 발병 원리를 이해하고 더 나아가 항암제 개발에도 중요한 정보를 제공할 것으로 기대된다ˮ라고 말했다.
정인경 교수는 "암에서 빈번하게 발생하는 대규모 구조 변이의 기능을 3차원 게놈 구조 해독을 통해 정밀하게 규명 가능함을 보여줬다ˮ라며 "이번 연구 결과는 아직 해독이 완벽하게 이루어지고 있지 않은 암 유전체를 정밀하게 해독하는 기술을 한 단계 더 발전시키는 계기가 될 것이다”라고 말했다.
이번 연구는 한국연구재단 기반산업화 인프라 그리고 서경배과학재단의 지원을 통해 수행됐다.
2020.12.28
조회수 49558
-
 지하 공간 탐사를 위한 생체모방형 두더지 로봇 개발
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 일명 두더지 로봇인 `몰봇(Mole-bot)'을 개발했다. 이는 두더지의 생물학적 구조와 굴착 습성을 모방해 무인 지하 탐사나 극한지역 또는 우주행성 탐사에 효율적으로 활용가능한 생체모방형 로봇이다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체해 신 에너지원으로 사용 가능한 탄층 메탄가스(Coalbed Methane)나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 우주 행성의 표본 채취를 목표로 연구팀에 의해 개발됐다.
기존 천부 굴착작업은 시추기와 파이프라인, 펌프 등 각종 장비를 조합해 작업을 진행해야 하지만 이제 `몰봇' 로봇 하나면 모든 작업을 원활히 수행할 수 있다. 이를 임베디드 방식이라고 표현하는데, 특히 `몰봇' 개발을 계기로 기존의 거대하고 복잡한 드릴링 장비 사용과 이로 인한 복잡한 공정, 환경 오염 유발 등 많은 문제점이 해결될 것으로 기대된다.
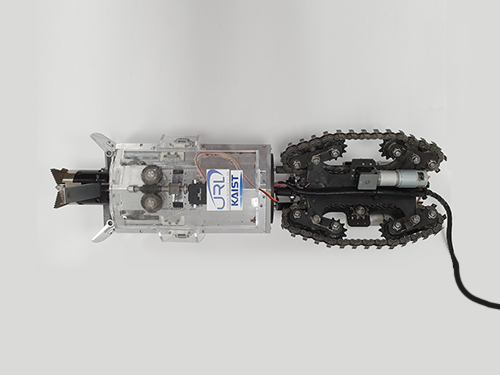
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다. 우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 `치젤 투스(Chisel tooth mole)'를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨구조를 모사해 설계했다. 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다. 연구팀은 이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360°자유롭게 방향 전환이 가능하다. 몰봇은 굴착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
마지막으로 이동부는 동일한 3개의 유닛을 삼각형 형태(120°간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
연구팀은 이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 지하 환경은 주변이 암석과 흙으로 이뤄져있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어둡기 때문에 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했는데 이 결과, 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다. 즉, 연구팀은 지구 자기장 시계열 데이터를 매칭시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 자체적으로 개발해 로봇 위치를 측정하는 문제를 해결했으며, 이는 지하공간에서의 3차원적인 자율 주행을 가능케한다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며, 총 4개의 항목에서 평가를 받았다. 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도로, 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
명 교수 연구팀은 몰봇이 기존 로봇들에 반해 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나고, 최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것으로 기대하고 있다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다. 그동안의 연구성과물로는 해외 우수저널 논문 5건 게재, 국제 학술대회 발표 12건, 국내 학술대회 발표 4건, 특허 출원 및 등록은 각각 3건과 1건의 실적을 기록했고 특히 국제 학술대회 우수발표상 및 국내학술대회 우수논문상을 각 1건씩 수상했다.
개발된 두더지 로봇인 `몰봇'의 구동 및 굴진 영상은 아래 주소에서 확인할 수 있다.
URL: https://youtu.be/pEnKy5UYEYQ
한편, 이번 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐다.
지하 공간 탐사를 위한 생체모방형 두더지 로봇 개발
우리 대학 전기및전자공학부 명현 교수 연구팀(미래도시 로봇연구실)이 일명 두더지 로봇인 `몰봇(Mole-bot)'을 개발했다. 이는 두더지의 생물학적 구조와 굴착 습성을 모방해 무인 지하 탐사나 극한지역 또는 우주행성 탐사에 효율적으로 활용가능한 생체모방형 로봇이다.
몰봇은 석유, 석탄 등 기존 에너지원을 대체해 신 에너지원으로 사용 가능한 탄층 메탄가스(Coalbed Methane)나 전자기기에 이용되는 희토류 등이 매설된 지역의 탐사, 더 나아가 우주 행성의 표본 채취를 목표로 연구팀에 의해 개발됐다.
기존 천부 굴착작업은 시추기와 파이프라인, 펌프 등 각종 장비를 조합해 작업을 진행해야 하지만 이제 `몰봇' 로봇 하나면 모든 작업을 원활히 수행할 수 있다. 이를 임베디드 방식이라고 표현하는데, 특히 `몰봇' 개발을 계기로 기존의 거대하고 복잡한 드릴링 장비 사용과 이로 인한 복잡한 공정, 환경 오염 유발 등 많은 문제점이 해결될 것으로 기대된다.
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성된다. 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다. 우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 `치젤 투스(Chisel tooth mole)'를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 `휴머럴 로테이션(Humeral rotation mole)'의 특별한 어깨구조를 모사해 설계했다. 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다. 연구팀은 이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360°자유롭게 방향 전환이 가능하다. 몰봇은 굴착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
마지막으로 이동부는 동일한 3개의 유닛을 삼각형 형태(120°간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다. 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
연구팀은 이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서시스템과 알고리즘을 탑재했다. 지하 환경은 주변이 암석과 흙으로 이뤄져있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어둡기 때문에 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했는데 이 결과, 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다. 즉, 연구팀은 지구 자기장 시계열 데이터를 매칭시키는 그래프 기반의 SLAM(Simultaneous Localization and Mapping; 동시적 위치 인식 및 맵핑) 기술을 자체적으로 개발해 로봇 위치를 측정하는 문제를 해결했으며, 이는 지하공간에서의 3차원적인 자율 주행을 가능케한다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며, 총 4개의 항목에서 평가를 받았다. 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도로, 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
명 교수 연구팀은 몰봇이 기존 로봇들에 반해 훨씬 효율적인 방법으로 지하자원 탐사가 가능할뿐만 아니라 경제성도 뛰어나고, 최근 스페이스X에 의해 촉발된 우주 개발 등 다양한 분야에 적용이 가능하기 때문에 세계시장 진출도 가능할 것으로 기대하고 있다.
이 연구는 2017년부터 2019년까지 진행됐으며, 로봇 구조 해석 및 지반 실험은 건설 및 환경공학과 홍정욱 교수 및 권태혁 교수 연구팀과 협업했다. 그동안의 연구성과물로는 해외 우수저널 논문 5건 게재, 국제 학술대회 발표 12건, 국내 학술대회 발표 4건, 특허 출원 및 등록은 각각 3건과 1건의 실적을 기록했고 특히 국제 학술대회 우수발표상 및 국내학술대회 우수논문상을 각 1건씩 수상했다.
개발된 두더지 로봇인 `몰봇'의 구동 및 굴진 영상은 아래 주소에서 확인할 수 있다.
URL: https://youtu.be/pEnKy5UYEYQ
한편, 이번 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐다.
2020.06.05
조회수 14509