%EB%B0%A9%ED%9A%A8%EC%B6%A9
-
 ‘호버바이크’, 미래 하늘을 누비다
호버바이크는 기존 교통 체계를 보완할 수 있는 차세대 모빌리티로서 고중량 탑재 및 장거리 비행을 통해 교통 혼잡이 없는 공중 교통 수단으로 활용될 수 있다. 국내 연구진이 고성능 호버바이크의 개발을 통해 해외 기술 의존을 탈피한 국내 자체 개발의 유/무인 복합 하이브리드 기체를 개발하여 국내 PAV* 및 UAM 시장 발전에 이바지할 것으로 기대된다.
*PAV: Personal Aerial Vehicle, 개인용 비행체. 미래 도시형 항공 교통(UAM, Urban Air Mobility)의 핵심 요소로, 차세대 교통 체계의 중요한 부분을 구성함.
우리 대학 항공우주공학과 방효충 교수 연구팀이 유/무인 운용 가능한 고신뢰성의 다목적 수직 이착륙 호버바이크 핵심 기술을 성공적으로 개발했다고 27일 밝혔다.
이번 연구는 항공우주공학과 한재흥 교수, 이지윤 교수, 안재명 교수, 최한림 교수, 이창훈 교수, 한서대학교 무인항공기학과 이동진 교수, 동아대학교 전자공학과 박종오 교수 연구팀이 참여하였다.
연구팀은 고성능 호버바이크의 개발을 위해 다목적 비행체 최적설계, 하이브리드 추진 시스템, 고신뢰성 정밀항법 및 비행제어 시스템, 자율비행 및 고장 감지 관련 주요 기술을 확보하였다.
호버바이크 플랫폼은 배터리 기반 드론의 단점을 극복하고자 가솔린 엔진 기반의 하이브리드 시스템을 도입하여, 해외 기술 수준 대비 약 60% 우수한 성능 및 최대 탑재 중량을 달성하였다. 이를 통해 민수용으로 긴급 물자 배송, 물류, 구조 활동과 군수용으로 군수품 수송 및 임무 지원 등의 다양한 분야에서 활용이 가능할 것으로 기대된다.
고신뢰성 정밀 항법 기술을 이용하여 GPS가 없거나 신호가 약한 환경에서도 안정적인 비행이 가능하도록 DGPS/INS* 기반의 다중 센서 융합 기술을 구현하여 항법 시스템을 적용하였다.
*DGPS/INS: Differential GPS(DGPS)의 높은 정확도와 관성항법장치(Inertial Navigation System, INS)을 결합한 항법 솔루션
또한, 고신뢰성 비행제어 기술을 개발하여 탑재체 및 바람 등의 외란 요소, 모델의 불확실성 하에서도 신뢰도 높은 기동이 가능하며 고장 검출 기술도 개발하였다.
고신뢰성 자율비행 시스템을 구성하여 자동착륙 안전지역을 선정한 후 헬리패드에 자동 착륙하는 유도 기법을 높은 정확도로 구현하였다. 장애물 회피 및 자동 착륙 자율비행 기술을 통해 복잡한 환경에서도 안정적인 운용이 가능하다.
연구 책임자인 방효충 교수는 "고신뢰성 비행 제어와 정밀 항법 기술을 통해 다양한 환경에서 호버바이크의 높은 실용성을 입증했다”라며“호버바이크는 PAV 및 미래 비행체로 이어지는 주요 길목을 제공할 수 있을 뿐만 아니라 기존 드론 기술을 몇 단계 뛰어넘을 수 있는 유망한 연구 성과이다. 이번 성과는 과제 실무자인 장광우/안형주 박사과정을 비롯한 8개의 공동 연구팀이 5년 동안 함께한 노력이 모여 이룬 결과라 더욱 뜻깊다”라고 강조했다.
이번 연구는 국방 및 민간 분야에서 새로운 개념의 비행체로 활용될 수 있는 유/무인 다목적 호버바이크의 핵심 기술을 확보하기 위한 것으로, 2019년 방위사업청 미래도전국방기술 연구개발사업으로 시작되어 국방과학연구소의 관리하에 2024년 마무리되었다. 향후 2025년 2월 26~28일 부산 벡스코에서 개최되는 2025 드론쇼코리아(DSK2025)에서 최초로 전시될 예정이다.
2024.12.27 조회수 4294
‘호버바이크’, 미래 하늘을 누비다
호버바이크는 기존 교통 체계를 보완할 수 있는 차세대 모빌리티로서 고중량 탑재 및 장거리 비행을 통해 교통 혼잡이 없는 공중 교통 수단으로 활용될 수 있다. 국내 연구진이 고성능 호버바이크의 개발을 통해 해외 기술 의존을 탈피한 국내 자체 개발의 유/무인 복합 하이브리드 기체를 개발하여 국내 PAV* 및 UAM 시장 발전에 이바지할 것으로 기대된다.
*PAV: Personal Aerial Vehicle, 개인용 비행체. 미래 도시형 항공 교통(UAM, Urban Air Mobility)의 핵심 요소로, 차세대 교통 체계의 중요한 부분을 구성함.
우리 대학 항공우주공학과 방효충 교수 연구팀이 유/무인 운용 가능한 고신뢰성의 다목적 수직 이착륙 호버바이크 핵심 기술을 성공적으로 개발했다고 27일 밝혔다.
이번 연구는 항공우주공학과 한재흥 교수, 이지윤 교수, 안재명 교수, 최한림 교수, 이창훈 교수, 한서대학교 무인항공기학과 이동진 교수, 동아대학교 전자공학과 박종오 교수 연구팀이 참여하였다.
연구팀은 고성능 호버바이크의 개발을 위해 다목적 비행체 최적설계, 하이브리드 추진 시스템, 고신뢰성 정밀항법 및 비행제어 시스템, 자율비행 및 고장 감지 관련 주요 기술을 확보하였다.
호버바이크 플랫폼은 배터리 기반 드론의 단점을 극복하고자 가솔린 엔진 기반의 하이브리드 시스템을 도입하여, 해외 기술 수준 대비 약 60% 우수한 성능 및 최대 탑재 중량을 달성하였다. 이를 통해 민수용으로 긴급 물자 배송, 물류, 구조 활동과 군수용으로 군수품 수송 및 임무 지원 등의 다양한 분야에서 활용이 가능할 것으로 기대된다.
고신뢰성 정밀 항법 기술을 이용하여 GPS가 없거나 신호가 약한 환경에서도 안정적인 비행이 가능하도록 DGPS/INS* 기반의 다중 센서 융합 기술을 구현하여 항법 시스템을 적용하였다.
*DGPS/INS: Differential GPS(DGPS)의 높은 정확도와 관성항법장치(Inertial Navigation System, INS)을 결합한 항법 솔루션
또한, 고신뢰성 비행제어 기술을 개발하여 탑재체 및 바람 등의 외란 요소, 모델의 불확실성 하에서도 신뢰도 높은 기동이 가능하며 고장 검출 기술도 개발하였다.
고신뢰성 자율비행 시스템을 구성하여 자동착륙 안전지역을 선정한 후 헬리패드에 자동 착륙하는 유도 기법을 높은 정확도로 구현하였다. 장애물 회피 및 자동 착륙 자율비행 기술을 통해 복잡한 환경에서도 안정적인 운용이 가능하다.
연구 책임자인 방효충 교수는 "고신뢰성 비행 제어와 정밀 항법 기술을 통해 다양한 환경에서 호버바이크의 높은 실용성을 입증했다”라며“호버바이크는 PAV 및 미래 비행체로 이어지는 주요 길목을 제공할 수 있을 뿐만 아니라 기존 드론 기술을 몇 단계 뛰어넘을 수 있는 유망한 연구 성과이다. 이번 성과는 과제 실무자인 장광우/안형주 박사과정을 비롯한 8개의 공동 연구팀이 5년 동안 함께한 노력이 모여 이룬 결과라 더욱 뜻깊다”라고 강조했다.
이번 연구는 국방 및 민간 분야에서 새로운 개념의 비행체로 활용될 수 있는 유/무인 다목적 호버바이크의 핵심 기술을 확보하기 위한 것으로, 2019년 방위사업청 미래도전국방기술 연구개발사업으로 시작되어 국방과학연구소의 관리하에 2024년 마무리되었다. 향후 2025년 2월 26~28일 부산 벡스코에서 개최되는 2025 드론쇼코리아(DSK2025)에서 최초로 전시될 예정이다.
2024.12.27 조회수 4294 -
 방효충 교수 연구팀, 지구 저궤도 관측 큐브위성 궤도진입 및 교신 성공
우리 대학 항공우주공학과 방효충 교수 연구팀이 큐브위성 궤도진입 및 첫 교신을 성공적으로 수행했다.
방 교수 연구팀에서 개발한 LINK(Little Intelligent Nanosatellite of KAIST)는 4월 18일에 발사돼 국제우주정거장으로 배송된 바 있다.
궤도진입은 5월 18일 오전 10시에 NRCSD(NanoRacks CubeSat Deployer)를 통해 이뤄졌으며 한국 시각으로 같은 날 23시 5분 첫 교신에 성공했다. 지상국에서 확인한 큐브위성의 상태는 양호하다.
LINK는 벨기에 Von Karman Institute에서 주관하는 QB50 프로젝트의 일환으로 개발됐다.
QB50는 큰 대기항력 때문에 관측이 덜 이루어진 200~400km 구간의 지구 저궤도 대기를 개발비용이 저렴한 큐브위성을 다수 발사해 관측하고자 하는 국제 공동 프로젝트로 전 세계 23개 이상의 국가에서 참여하고 있다.
LINK는 2unit(20x10x10cm3) 크기로 무게가 약 2kg이며 지구관측을 위해 이온-중성자 질량 분광기 및 랑뮈어 탐침을 탑재하고 있다. 랑뮈어 탐침은 우리 대학 물리학과 민경욱 교수 연구팀이 개발했다.
궤도진입을 마친 큐브위성은 초기 한 달 동안 지상국을 통해 시스템 점검을 수행한 뒤 두 달에 걸쳐 저궤도 대기관측 데이터를 수집할 예정이다.
LINK 큐브위성의 개발은 항공우주연구원 '2012년 큐브위성대회'의 지원을 받아 이뤄졌다.
□ 그림 설명
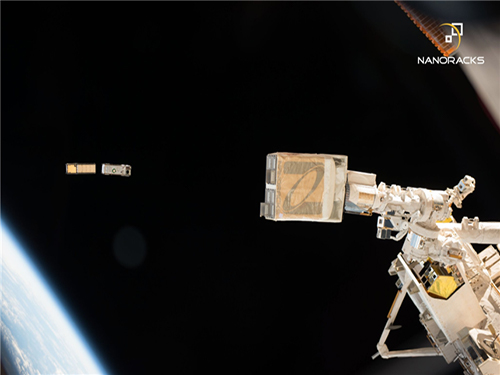
그림1. NRCSD(NanoRacks CubeSat Deployer) 큐브위성 사출 장면
그림2. LINK 비콘신호 수신
2017.05.24 조회수 16541
방효충 교수 연구팀, 지구 저궤도 관측 큐브위성 궤도진입 및 교신 성공
우리 대학 항공우주공학과 방효충 교수 연구팀이 큐브위성 궤도진입 및 첫 교신을 성공적으로 수행했다.
방 교수 연구팀에서 개발한 LINK(Little Intelligent Nanosatellite of KAIST)는 4월 18일에 발사돼 국제우주정거장으로 배송된 바 있다.
궤도진입은 5월 18일 오전 10시에 NRCSD(NanoRacks CubeSat Deployer)를 통해 이뤄졌으며 한국 시각으로 같은 날 23시 5분 첫 교신에 성공했다. 지상국에서 확인한 큐브위성의 상태는 양호하다.
LINK는 벨기에 Von Karman Institute에서 주관하는 QB50 프로젝트의 일환으로 개발됐다.
QB50는 큰 대기항력 때문에 관측이 덜 이루어진 200~400km 구간의 지구 저궤도 대기를 개발비용이 저렴한 큐브위성을 다수 발사해 관측하고자 하는 국제 공동 프로젝트로 전 세계 23개 이상의 국가에서 참여하고 있다.
LINK는 2unit(20x10x10cm3) 크기로 무게가 약 2kg이며 지구관측을 위해 이온-중성자 질량 분광기 및 랑뮈어 탐침을 탑재하고 있다. 랑뮈어 탐침은 우리 대학 물리학과 민경욱 교수 연구팀이 개발했다.
궤도진입을 마친 큐브위성은 초기 한 달 동안 지상국을 통해 시스템 점검을 수행한 뒤 두 달에 걸쳐 저궤도 대기관측 데이터를 수집할 예정이다.
LINK 큐브위성의 개발은 항공우주연구원 '2012년 큐브위성대회'의 지원을 받아 이뤄졌다.
□ 그림 설명
그림1. NRCSD(NanoRacks CubeSat Deployer) 큐브위성 사출 장면
그림2. LINK 비콘신호 수신
2017.05.24 조회수 16541 -
 방효충 교수, 지구 저궤도의 관측 위한 큐브위성 발사
우리 대학 항공우주공학과 방효충 교수 연구팀이 지구 저궤도 관측을 위한 초소형 큐브위성을 발사했다.
방 교수 연구팀에서 개발한 큐브위성인 LINK(Little Intelligent Nanosatellite of KAIST)를 포함한 총 28개의 큐브위성이 아틀라스 V(Atlas V) 발사체(NASA CRS-7 미션)에 탑재돼 미 동부시간 4월 18일 오전 11시 11분에 미국 Space Launch Complex 41에서 성공적으로 발사됐다.
큐브위성들은 국제우주정거장에서 보관 후 약 한 달 뒤에 궤도 진입 예정이며 이후 약 3달 동안 과학임무를 수행한다.
LINK는 벨기에의 Von Karman Institute에서 주관하는 QB50 프로젝트의 일환으로 개발됐다.
QB50 프로젝트는 큰 대기항력 때문에 관측이 덜 이뤄진 200~400km 구간의 지구 저궤도 대기를 개발비용이 저렴한 큐브위성을 다수 발사해 관측하는 국제 공동 프로젝트이다. 2012년에 시작된 이 프로젝트는 전 세계 23개 이상의 국가가 참여하고 있다.
LINK는 2유닛(20x10x10㎤) 크기로 무게는 2kg 정도이며 지구 관측을 위해 이온-중성자 질량 분광기 및 랑뮈어 탐침을 탑재했다. 랑뮈어 탐침은 우리 대학 물리학과 민경욱 교수 연구팀이 개발했다.
방 교수는 “QB50 프로젝트는 교육용으로만 쓰이던 큐브위성이 의미있는 과학임무를 수행하기 위한 도구로 도약하는 계기가 될 것이다”며 “다수의 큐브위성을 이용해 저궤도 대기 관측을 한 첫 사례로 의미있는 데이터를 얻을 것으로 기대한다”고 말했다.
또한 “이 노하우를 이용해 앞으로 위성을 추가 개발해 연구 내용을 우주에서 직접 검증할 수 있을 것이다”고 말했다.
현재 큐브위성을 실은 Cygnus 모듈이 궤도에서 대기 중이며 미 동부시간 4월 22일 오전 8시 39분 국제우주정거장과 도킹을 완료했다.
2017.04.24 조회수 19116
방효충 교수, 지구 저궤도의 관측 위한 큐브위성 발사
우리 대학 항공우주공학과 방효충 교수 연구팀이 지구 저궤도 관측을 위한 초소형 큐브위성을 발사했다.
방 교수 연구팀에서 개발한 큐브위성인 LINK(Little Intelligent Nanosatellite of KAIST)를 포함한 총 28개의 큐브위성이 아틀라스 V(Atlas V) 발사체(NASA CRS-7 미션)에 탑재돼 미 동부시간 4월 18일 오전 11시 11분에 미국 Space Launch Complex 41에서 성공적으로 발사됐다.
큐브위성들은 국제우주정거장에서 보관 후 약 한 달 뒤에 궤도 진입 예정이며 이후 약 3달 동안 과학임무를 수행한다.
LINK는 벨기에의 Von Karman Institute에서 주관하는 QB50 프로젝트의 일환으로 개발됐다.
QB50 프로젝트는 큰 대기항력 때문에 관측이 덜 이뤄진 200~400km 구간의 지구 저궤도 대기를 개발비용이 저렴한 큐브위성을 다수 발사해 관측하는 국제 공동 프로젝트이다. 2012년에 시작된 이 프로젝트는 전 세계 23개 이상의 국가가 참여하고 있다.
LINK는 2유닛(20x10x10㎤) 크기로 무게는 2kg 정도이며 지구 관측을 위해 이온-중성자 질량 분광기 및 랑뮈어 탐침을 탑재했다. 랑뮈어 탐침은 우리 대학 물리학과 민경욱 교수 연구팀이 개발했다.
방 교수는 “QB50 프로젝트는 교육용으로만 쓰이던 큐브위성이 의미있는 과학임무를 수행하기 위한 도구로 도약하는 계기가 될 것이다”며 “다수의 큐브위성을 이용해 저궤도 대기 관측을 한 첫 사례로 의미있는 데이터를 얻을 것으로 기대한다”고 말했다.
또한 “이 노하우를 이용해 앞으로 위성을 추가 개발해 연구 내용을 우주에서 직접 검증할 수 있을 것이다”고 말했다.
현재 큐브위성을 실은 Cygnus 모듈이 궤도에서 대기 중이며 미 동부시간 4월 22일 오전 8시 39분 국제우주정거장과 도킹을 완료했다.
2017.04.24 조회수 19116