본문 바로가기
대메뉴 바로가기
KAIST
연구뉴스
유틸열기
홈페이지 통합검색
-
검색
메뉴 열기
%EC%A0%84%EA%B8%B0%EC%A0%91%EC%B0%A9%EC%8B%9D%ED%94%BC%EB%B6%80
최신순
조회순
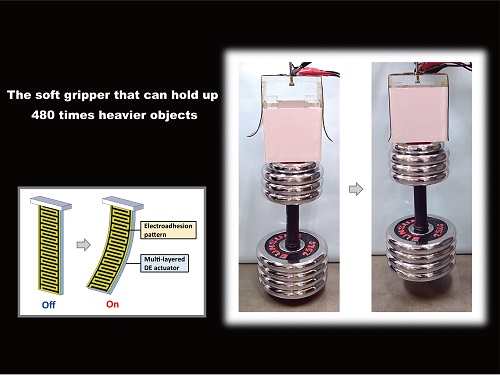
자체 무게의 480배 이상을 들어올릴 수 있는 소프트 그리퍼 개발
우리 대학 기계공학과 경기욱 교수 연구팀이 자체 무게의 480배 이상의 중량을 들어올릴 수 있는 소프트 그리퍼를 개발했다. 연구팀에서 개발한 그리퍼는 인공근육과 전기접착식피부를 결합한 초경량 그리퍼로서, 가벼운 인공근육을 이용해 쥐고자 하는 물체에 접촉한 후 강력한 전기접착력을 발생시켜 무거운 물체를 들어올릴 수 있도록 한다. 제작된 소프트 그리퍼는 6.2g의 가벼운 무게를 가지지만 625g의 무게까지 쥐고 이송시킬 수 있으며, 대면적으로 제작된 35g의 그리퍼는 자체 무게의 480배 이상인 16.8kg까지 집어올릴 수 있다. 연구팀은 이번 연구에서 폴리머 기반의 액추에이터를 인공근육으로 사용했기 때문에 매우 가벼운 무게의 소프트 그리퍼를 구현할 수 있었다. 폴리머 기반의 액추에이터는 높은 유전율을 가지는 얇은 탄성체의 양면에 신축성이 있는 전극을 도포하여 제작됐다. 양면의 전극에 전압을 가해주면 전극 사이의 인력이 발생하여 탄성체를 두께 방향으로 누르게 되고, 결과적으로 면 방향의 팽창이 발생하는 원리를 사용했다. 연구팀은 이러한 작동원리를 소프트 그리퍼에 응용하기 위해 팽창 변형을 굽힘 변형으로 변환해주는 기계적 구조를 도입했다. 연구팀은 인공근육을 사용해 그리퍼를 초경량으로 제작함과 동시에, 무거운 물체를 들어올릴 수 있도록 전기접착식피부를 적용했다. 전기접착식피부의 내부에는 접착력을 발생시키기 위한 전극이 반복적으로 배치되어 있으며, 피부의 표면에는 전기적 절연층이 코팅돼있다. 전기접착식피부가 물체와 접촉한 후 반복적으로 배치된 전극에 전압이 가해지면, 접촉한 물체의 표면에 전기접착식피부의 전극과 반대된 전하가 유도된다. 결과적으로 전기접착식피부의 전극과 물체 표면에 유도된 전하 사이에 전기적 인력이 생성돼 그리퍼와 대상 물체 사이에 높은 접착력을 발생시킬 수 있다. 연구팀에서는 소프트 그리퍼의 성능을 극대화하기 위해 인공근육 및 전기접착식피부의 구조, 규격, 소재를 실험적으로 최적화했다. 그 결과 연구팀에서 개발한 소프트 그리퍼는 두 개의 손가락만을 이용하지만 원기둥, 구, 육면체, 평평한 물체, 포장재, 비정형 물체 등 다양한 형상의 물체를 집어올리고 이송할 수 있으면서도, 자체 무게의 480배에 달하는 무게까지 들어올릴 수 있다. 연구팀이 개발한 소프트 그리퍼는 손으로 쥐기 어려운 평평한 모양부터 다양한 입체 모양의 물체를 모두 집을 수 있다는 장점이 있기 때문에, 로봇핸드를 교체하지 않고도 다양한 모양의 물체를 다루는 작업을 연속적으로 수행할 수 있을 것으로 기대된다. 또한, 경량화된 소프트 그리퍼를 사용함으로써 로봇팔에 가해지는 부하를 줄일 수 있고, 그 결과 기존의 로봇 그리퍼를 사용한 경우보다 더 무거운 물체를 이송시키는 것을 가능하게 할 수 있다. 관련 연구를 주도적으로 수행한 박사과정 황건우 학생은 이번 연구를 Instruments 분야 Top (상위 1%) 학술지인 IEEE Trans. Industrial Electronics를 포함해Smart Materials and Structures 등에 총 2편의 논문을 게재했다. (논문명: Electroadhesion-Based High-Payload Soft Gripper With Mechanically Strengthened Structure / Improved electroadhesive force by using fumed alumina/PDMS composites) 이번 연구는 한국산업기술평가관리원의 산업핵심기술개발사업 및 로봇산업핵심기술개발사업(알키미스트 프로젝트)의 지원을 받아 수행됐다.
2021.03.09
조회수 94605
<<
첫번째페이지
<
이전 페이지
1
>
다음 페이지
>>
마지막 페이지 1