-
 기계공학과 구승범 교수팀, NeurIPS 2024 MyoChallenge 대회 보행 부문 우승
우리 대학 기계공학과 구승범 교수 연구팀(박건우 박사과정, 신범수 박사과정, 박종현 박사과정)은 2024년 12월 캐나다 밴쿠버에서 열린 NeurIPS 학회의 경쟁 대회 중 하나인 MyoChallenge 대회에 참가하여, 15개국에서 54팀이 참여한 가운데, 보행 운동 부문 1위를 차지하였다. 이 대회는 Google Deepmind, Google Cloud와 Össur가 후원하였다.
이 대회에서는 인체의 신경근육제어 원리를 연구하기 위한 다물체 동역학 기반의 인체 근골격 시뮬레이션 환경이 제시되었다. 자체 알고리즘으로 작동하는 의족/의수 (Prosthetic limb)가 결합된 인체 모델이 일상 생활 동작(상지 운동, 보행 운동)을 할 수 있도록 인체 근육 제어기를 학습하고, 그 성능을 경쟁하였다. 보행 운동 부문에서는 의족을 장착한 인체 모델이 주어진 트랙(평지, 거친길, 언덕, 계단)에 맞춰 보행할 수 있도록 인체 제어기를 학습하고, 그 안정성과 속도를 평가하였다.
하지에 54개 근육과 오른 다리 의족이 장착된 인체 모델의 근육 활성도를 제어하여, 지면이 고르지 않은 5m x 120m 경기장에서 넘어지지 않고 앞으로 나아가는 경기가 진행되었다. 구승범 교수 연구팀은 심층강화학습 기술과 인체 운동 데이터 기반 동작 생성 기술을 적용하여, 실제 사람이 근육을 제어하여 운동하는 모습을 모방할 수 있는 고성능 인체 운동 제어기를 학습하였다. 특히, 올해는 연구실에서 자체 구축한 120명의 평지, 계단 및 경사로 보행 동작 데이터셋을 사용해서, 인체 모델이 계단 및 경사로 지형에서도 안정적으로 보행할 수 있도록 학습하였다.
이 기술은 인체의 신경운동제어를 모방하여 다양한 상황에서의 보행 동작을 생성할 수 있다. 또한 이번 대회와 같이 인체에 착용하는 보조 장비와 상호 작용 시뮬레이션이 가능하여, 장비/기구의 개발 및 성능 개선에 사용 가능하다.
이번 대회에는 과학기술정보통신부(IITP ETRI 연구개발지원사업, 연구재단 미래유망융합기술파이오니어사업, 연구재단 중견연구자지원사업)의 지원을 받아 참여하였다.
기계공학과 구승범 교수팀, NeurIPS 2024 MyoChallenge 대회 보행 부문 우승
우리 대학 기계공학과 구승범 교수 연구팀(박건우 박사과정, 신범수 박사과정, 박종현 박사과정)은 2024년 12월 캐나다 밴쿠버에서 열린 NeurIPS 학회의 경쟁 대회 중 하나인 MyoChallenge 대회에 참가하여, 15개국에서 54팀이 참여한 가운데, 보행 운동 부문 1위를 차지하였다. 이 대회는 Google Deepmind, Google Cloud와 Össur가 후원하였다.
이 대회에서는 인체의 신경근육제어 원리를 연구하기 위한 다물체 동역학 기반의 인체 근골격 시뮬레이션 환경이 제시되었다. 자체 알고리즘으로 작동하는 의족/의수 (Prosthetic limb)가 결합된 인체 모델이 일상 생활 동작(상지 운동, 보행 운동)을 할 수 있도록 인체 근육 제어기를 학습하고, 그 성능을 경쟁하였다. 보행 운동 부문에서는 의족을 장착한 인체 모델이 주어진 트랙(평지, 거친길, 언덕, 계단)에 맞춰 보행할 수 있도록 인체 제어기를 학습하고, 그 안정성과 속도를 평가하였다.
하지에 54개 근육과 오른 다리 의족이 장착된 인체 모델의 근육 활성도를 제어하여, 지면이 고르지 않은 5m x 120m 경기장에서 넘어지지 않고 앞으로 나아가는 경기가 진행되었다. 구승범 교수 연구팀은 심층강화학습 기술과 인체 운동 데이터 기반 동작 생성 기술을 적용하여, 실제 사람이 근육을 제어하여 운동하는 모습을 모방할 수 있는 고성능 인체 운동 제어기를 학습하였다. 특히, 올해는 연구실에서 자체 구축한 120명의 평지, 계단 및 경사로 보행 동작 데이터셋을 사용해서, 인체 모델이 계단 및 경사로 지형에서도 안정적으로 보행할 수 있도록 학습하였다.
이 기술은 인체의 신경운동제어를 모방하여 다양한 상황에서의 보행 동작을 생성할 수 있다. 또한 이번 대회와 같이 인체에 착용하는 보조 장비와 상호 작용 시뮬레이션이 가능하여, 장비/기구의 개발 및 성능 개선에 사용 가능하다.
이번 대회에는 과학기술정보통신부(IITP ETRI 연구개발지원사업, 연구재단 미래유망융합기술파이오니어사업, 연구재단 중견연구자지원사업)의 지원을 받아 참여하였다.
2024.12.24
조회수 3909
-
 인간의 인지 방식과 유사한 AI 모델 개발
우리 연구진이 인간의 인지 방식을 모방해 이미지 변화를 이해하고, 시각적 일반화와 특정성을 동시에 확보하는 인공지능 기술을 개발했다. 이 기술은 의료 영상 분석, 자율주행, 로보틱스 등 다양한 분야에서 이미지를 이해하여 객체를 분류, 탐지하는 데 활용될 전망이다.
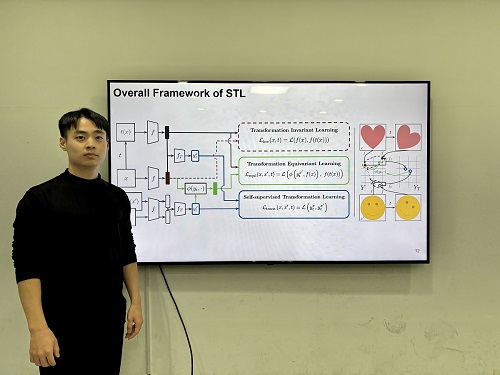
우리 대학 전기및전자공학부 김준모 교수 연구팀이 변환 레이블(transformational labels) 없이도 스스로 변환 민감 특징(transformation-sensitive features)을 학습할 수 있는 새로운 시각 인공지능 모델 STL(Self-supervised Transformation Learning)을 개발했다고 13일 밝혔다.
연구팀이 개발한 시각 인공지능 모델 STL은 스스로 이미지의 변환을 학습하여, 이미지 변환의 종류를 인간이 직접 알려주면서 학습하는 기존 방법들보다 높은 시각 정보 이해 능력을 보였다. 특히, 기존 방법론들을 통해 학습한 모델이 이해할 수 없는 세부적인 특징까지도 학습하여 기존 방법 대비 최대 42% 우수한 성능을 보여줬다.
컴퓨터 비전에서 이미지 변환을 통한 데이터 증강을 활용해 강건한 시각 표현을 학습하는 방식은 일반화 능력을 갖추는 데 효과적이지만, 변환에 따른 시각적 세부 사항을 무시하는 경향이 있어 범용 시각 인공지능 모델로서 한계가 있다.
연구팀이 제안한 STL은 변환 라벨 없이 변환 정보를 학습할 수 있도록 설계된 새로운 학습 기법으로, 라벨 없이 변환 민감 특징을 학습할 수 있다. 또한, 기존 학습 방법 대비 학습 복잡도를 유지한 채로 효율적인 최적화할 수 있는 방법을 제안했다.
실험 결과, STL은 정확하게 객체를 분류하고 탐지 실험에서 가장 낮은 오류율을 기록했다. 또한, STL이 생성한 표현 공간은 변환의 강도와 유형에 따라 명확히 군집화되어 변환 간 관계를 잘 반영하는 것으로 나타났다.
김준모 교수는 "이번에 개발한 STL은 복잡한 변환 패턴을 학습하고 이를 표현 공간에서 효과적으로 반영하는 능력을 통해 변환 민감 특징 학습의 새로운 가능성을 제시했다”며, "라벨 없이도 변환 정보를 학습할 수 있는 기술은 다양한 AI 응용 분야에서 핵심적인 역할을 할 것”이라고 말했다.
우리 대학 전기및전자공학부 유재명 박사과정이 제1 저자로 참여한 이번 연구는 최고 권위 국제 학술지 ‘신경정보처리시스템학회(NeurIPS) 2024’에서 올 12월 발표될 예정이다.(논문명: Self-supervised Transformation Learning for Equivariant Representations)
한편 이번 연구는 이 논문은 2024년도 정부(과학기술정보통신부)의 재원으로 정보통신기획평가원의 지원을 받아 수행된 연구 성과물(No.RS-2024-00439020, 지속가능한 실시간 멀티모달 인터렉티브 생성 AI 개발, SW스타랩) 이다.
인간의 인지 방식과 유사한 AI 모델 개발
우리 연구진이 인간의 인지 방식을 모방해 이미지 변화를 이해하고, 시각적 일반화와 특정성을 동시에 확보하는 인공지능 기술을 개발했다. 이 기술은 의료 영상 분석, 자율주행, 로보틱스 등 다양한 분야에서 이미지를 이해하여 객체를 분류, 탐지하는 데 활용될 전망이다.
우리 대학 전기및전자공학부 김준모 교수 연구팀이 변환 레이블(transformational labels) 없이도 스스로 변환 민감 특징(transformation-sensitive features)을 학습할 수 있는 새로운 시각 인공지능 모델 STL(Self-supervised Transformation Learning)을 개발했다고 13일 밝혔다.
연구팀이 개발한 시각 인공지능 모델 STL은 스스로 이미지의 변환을 학습하여, 이미지 변환의 종류를 인간이 직접 알려주면서 학습하는 기존 방법들보다 높은 시각 정보 이해 능력을 보였다. 특히, 기존 방법론들을 통해 학습한 모델이 이해할 수 없는 세부적인 특징까지도 학습하여 기존 방법 대비 최대 42% 우수한 성능을 보여줬다.
컴퓨터 비전에서 이미지 변환을 통한 데이터 증강을 활용해 강건한 시각 표현을 학습하는 방식은 일반화 능력을 갖추는 데 효과적이지만, 변환에 따른 시각적 세부 사항을 무시하는 경향이 있어 범용 시각 인공지능 모델로서 한계가 있다.
연구팀이 제안한 STL은 변환 라벨 없이 변환 정보를 학습할 수 있도록 설계된 새로운 학습 기법으로, 라벨 없이 변환 민감 특징을 학습할 수 있다. 또한, 기존 학습 방법 대비 학습 복잡도를 유지한 채로 효율적인 최적화할 수 있는 방법을 제안했다.
실험 결과, STL은 정확하게 객체를 분류하고 탐지 실험에서 가장 낮은 오류율을 기록했다. 또한, STL이 생성한 표현 공간은 변환의 강도와 유형에 따라 명확히 군집화되어 변환 간 관계를 잘 반영하는 것으로 나타났다.
김준모 교수는 "이번에 개발한 STL은 복잡한 변환 패턴을 학습하고 이를 표현 공간에서 효과적으로 반영하는 능력을 통해 변환 민감 특징 학습의 새로운 가능성을 제시했다”며, "라벨 없이도 변환 정보를 학습할 수 있는 기술은 다양한 AI 응용 분야에서 핵심적인 역할을 할 것”이라고 말했다.
우리 대학 전기및전자공학부 유재명 박사과정이 제1 저자로 참여한 이번 연구는 최고 권위 국제 학술지 ‘신경정보처리시스템학회(NeurIPS) 2024’에서 올 12월 발표될 예정이다.(논문명: Self-supervised Transformation Learning for Equivariant Representations)
한편 이번 연구는 이 논문은 2024년도 정부(과학기술정보통신부)의 재원으로 정보통신기획평가원의 지원을 받아 수행된 연구 성과물(No.RS-2024-00439020, 지속가능한 실시간 멀티모달 인터렉티브 생성 AI 개발, SW스타랩) 이다.
2024.12.15
조회수 4302
-
 천천히 걸음 속도 높여도 다 아는 인공지능 기술 개발
최근 건강에 관한 관심이 점차 커지면서 일상생활에서 스마트 워치, 스마트 링 등을 통해 자기 신체 변화를 살펴보는 일이 보편화되었다. 그런데 기존 헬스케어 앱에서는 걷기에서 뛰기로 갑자기 변화를 줄 경우는 잘 측정이 되지만 천천히 속도를 높이는 경우는 측정이 안 되는 현상이 발생했다. 우리 연구진이 완만한 변화에도 동작을 정확하게 파악하는 기술을 개발했다.
우리 대학 전산학부 이재길 교수 연구팀이 다양한 착용 기기 센서 데이터에서 사용자 상태 변화를 정확하게 검출하는 새로운 인공지능 기술을 개발했다고 12일 밝혔다.
보통 헬스케어 앱에서는 센서 데이터를 통해 사용자의 상태 변화를 탐지하여 현재 동작을 정확히 인식하는 기능이 필수이다. 이를 변화점 탐지라 부르며 다양한 인공지능 기술이 변화점 탐지 품질을 향상하기 위해 적용되고 있다.
이재길 교수팀은 사용자의 상태가 급진적으로 변하거나 점진적으로 변하는지에 관계없이 정확하게 잘 동작하는 변화점 탐지 방법론을 개발했다.
연구팀은 각 시점의 센서 데이터를 인공지능 기술을 통해 벡터*로 표현하였을 때, 이러한 벡터가 시간이 지남에 따라 이동하는 방향을 주목하였다. 같은 동작이 유지될 때는 벡터가 이동하는 방향이 급변하는 경향이 크고, 동작이 바뀔 때는 벡터가 직선상으로 이동하는 경향이 크게 나타났다.
*벡터: 사용자의 시점별 상태 특성(이동속도, 자세, 움직임 등)을 나타내는 가장 좋은 수학적 개념
연구팀은 제안한 방법론을 ‘리커브(RECURVE)’라고 명명했다. 리커브(RECURVE)는 양궁 경기에 쓰이는 활의 한 종류이며, 활이 휘어 있는 모습이 데이터의 이동 방향 변화 정도(곡률)로 변화점을 탐지하는 본 방법론의 동작 방식을 잘 나타낸다고 보았다. 이 방법은 변화점 탐지의 기준을 거리에서 곡률이라는 새로운 관점으로 바라본 매우 신선한 방법이라는 평가를 받았다.
연구팀은 변화점 탐지 문제에서 다양한 헬스케어 센서 스트림 데이터를 사용하여 방법론의 우수성을 검증하여 기존 방법론에 비해 최대 12.7% 정확도 향상을 달성했다.
연구팀을 지도한 이재길 교수는 "센서 스트림 데이터 변화점 탐지 분야의 새로운 지평을 열 만한 획기적인 방법이며 실용화 및 기술 이전이 이뤄지면 실시간 데이터 분석 연구 및 디지털 헬스케어 산업에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
데이터사이언스대학원을 졸업한 신유주 박사가 제1 저자, 전산학부 박재현 석사과정 학생이 제2 저자로 참여한 이번 연구는 최고권위 국제학술대회 `신경정보처리시스템학회(NeurIPS) 2024'에서 올 12월 발표될 예정이다. (논문명 : Exploiting Representation Curvature for Boundary Detection in Time Series)
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 SW컴퓨팅산업원천기술개발사업 SW스타랩 과제로 개발한 연구성과 결과물(RS-2020-II200862, DB4DL: 딥러닝 지원 고사용성 및 고성능 분산 인메모리 DBMS 개발)이다.
천천히 걸음 속도 높여도 다 아는 인공지능 기술 개발
최근 건강에 관한 관심이 점차 커지면서 일상생활에서 스마트 워치, 스마트 링 등을 통해 자기 신체 변화를 살펴보는 일이 보편화되었다. 그런데 기존 헬스케어 앱에서는 걷기에서 뛰기로 갑자기 변화를 줄 경우는 잘 측정이 되지만 천천히 속도를 높이는 경우는 측정이 안 되는 현상이 발생했다. 우리 연구진이 완만한 변화에도 동작을 정확하게 파악하는 기술을 개발했다.
우리 대학 전산학부 이재길 교수 연구팀이 다양한 착용 기기 센서 데이터에서 사용자 상태 변화를 정확하게 검출하는 새로운 인공지능 기술을 개발했다고 12일 밝혔다.
보통 헬스케어 앱에서는 센서 데이터를 통해 사용자의 상태 변화를 탐지하여 현재 동작을 정확히 인식하는 기능이 필수이다. 이를 변화점 탐지라 부르며 다양한 인공지능 기술이 변화점 탐지 품질을 향상하기 위해 적용되고 있다.
이재길 교수팀은 사용자의 상태가 급진적으로 변하거나 점진적으로 변하는지에 관계없이 정확하게 잘 동작하는 변화점 탐지 방법론을 개발했다.
연구팀은 각 시점의 센서 데이터를 인공지능 기술을 통해 벡터*로 표현하였을 때, 이러한 벡터가 시간이 지남에 따라 이동하는 방향을 주목하였다. 같은 동작이 유지될 때는 벡터가 이동하는 방향이 급변하는 경향이 크고, 동작이 바뀔 때는 벡터가 직선상으로 이동하는 경향이 크게 나타났다.
*벡터: 사용자의 시점별 상태 특성(이동속도, 자세, 움직임 등)을 나타내는 가장 좋은 수학적 개념
연구팀은 제안한 방법론을 ‘리커브(RECURVE)’라고 명명했다. 리커브(RECURVE)는 양궁 경기에 쓰이는 활의 한 종류이며, 활이 휘어 있는 모습이 데이터의 이동 방향 변화 정도(곡률)로 변화점을 탐지하는 본 방법론의 동작 방식을 잘 나타낸다고 보았다. 이 방법은 변화점 탐지의 기준을 거리에서 곡률이라는 새로운 관점으로 바라본 매우 신선한 방법이라는 평가를 받았다.
연구팀은 변화점 탐지 문제에서 다양한 헬스케어 센서 스트림 데이터를 사용하여 방법론의 우수성을 검증하여 기존 방법론에 비해 최대 12.7% 정확도 향상을 달성했다.
연구팀을 지도한 이재길 교수는 "센서 스트림 데이터 변화점 탐지 분야의 새로운 지평을 열 만한 획기적인 방법이며 실용화 및 기술 이전이 이뤄지면 실시간 데이터 분석 연구 및 디지털 헬스케어 산업에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
데이터사이언스대학원을 졸업한 신유주 박사가 제1 저자, 전산학부 박재현 석사과정 학생이 제2 저자로 참여한 이번 연구는 최고권위 국제학술대회 `신경정보처리시스템학회(NeurIPS) 2024'에서 올 12월 발표될 예정이다. (논문명 : Exploiting Representation Curvature for Boundary Detection in Time Series)
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 SW컴퓨팅산업원천기술개발사업 SW스타랩 과제로 개발한 연구성과 결과물(RS-2020-II200862, DB4DL: 딥러닝 지원 고사용성 및 고성능 분산 인메모리 DBMS 개발)이다.
2024.11.12
조회수 4791
-
 뇌 기반 인공지능의 난제 해결
인간의 두뇌는 외부 세상으로부터 감각 정보를 받아들이기 이전부터 자발적인 무작위 활동을 통해 학습을 시작한다. 우리 연구진이 개발한 기술은 뇌 모방 인공신경망에서 무작위 정보를 사전 학습시켜 실제 데이터를 접했을 때 훨씬 빠르고 정확한 학습을 가능하게 하며, 향후 뇌 기반 인공지능 및 뉴로모픽 컴퓨팅 기술 개발의 돌파구를 열어줄 것으로 기대된다.
우리 대학 뇌인지과학과 백세범 교수 연구팀이 뇌 모방 인공신경망 학습의 오래된 난제였던 가중치 수송 문제(weight transport problem)*를 해결하고, 이를 통해 생물학적 뇌 신경망에서 자원 효율적 학습이 가능한 원리를 설명했다고 23일 밝혔다.
*가중치 수송 문제: 생물학적 뇌를 모방한 인공지능 개발에 가장 큰 장애물이 되는 난제로, 현재 일반적인 인공신경망의 학습에서 생물학적 뇌와 달리 대규모의 메모리와 계산 작업이 필요한 근본적인 이유임.
지난 수십 년간 인공지능의 발전은 올해 노벨 물리학상을 받은 제프리 힌튼(Geoffery Hinton)이 제시한 오류 역전파(error backpropagation) 학습에 기반한다. 그러나 오류 역전파 학습은 생물학적 뇌에서는 가능하지 않다고 생각되어 왔는데, 이는 학습을 위한 오류 신호를 계산하기 위해 개별 뉴런들이 다음 계층의 모든 연결 정보를 알고 있어야 하는 비현실적인 가정이 필요하기 때문이다.
가중치 수송 문제라고 불리는 이 난제는 1986년 힌튼에 의해 오류 역전파 학습이 제안된 이후, DNA 구조의 발견으로 노벨 생리의학상을 받은 프랜시스 크릭(Francis Crick)에 의해 제기됐으며, 이후 자연신경망과 인공신경망 작동 원리가 근본적으로 다를 수밖에 없는 이유로 여겨진다.
인공지능과 신경과학의 경계선에서, 힌튼을 비롯한 연구자들은 가중치 수송 문제를 해결함으로써 뇌의 학습 원리를 구현할 수 있는, 생물학적으로 타당한 모델을 만들고자 하는 시도를 계속해 왔다.
지난 2016년, 영국 옥스퍼드(Oxford) 대학과 딥마인드(DeepMind) 공동 연구진은 가중치 수송을 사용하지 않고도 오류 역전파 학습이 가능하다는 개념을 최초로 제시해 학계의 주목을 받았다. 그러나, 가중치 수송을 사용하지 않는 생물학적으로 타당한 오류 역전파 학습은 학습 속도가 느리고 정확도가 낮은 등 효율성이 떨어져, 현실적인 적용에는 문제가 있었다.
연구팀은 생물학적 뇌가 외부적인 감각 경험을 하기 이전부터 내부의 자발적인 무작위 신경 활동을 통해 이미 학습을 시작한다는 점에 주목했다. 이를 모방해 연구팀은 가중치 수송이 없는 생물학적으로 타당한 신경망에 의미 없는 무작위 정보(random noise)를 사전 학습시켰다.
그 결과, 오류 역전파 학습을 위해 필수적 조건인 신경망의 순방향과 역방향 신경세포 연결 구조의 대칭성이 만들어질 수 있음을 보였다. 즉, 무작위적 사전 학습을 통해 가중치 수송 없이 학습이 가능해진 것이다.
연구팀은 실제 데이터 학습에 앞서 무작위 정보를 학습하는 것이 ‘배우는 방법을 배우는’메타 학습(meta learning)의 성질을 가진다는 것을 밝혔다. 무작위 정보를 사전 학습한 신경망은 실제 데이터를 접했을 때 훨씬 빠르고 정확한 학습을 수행하며, 가중치 수송 없이 높은 학습 효율성을 얻을 수 있음을 보였다.
백세범 교수는 “데이터 학습만이 중요하다는 기존 기계학습의 통념을 깨고, 학습 전부터 적절한 조건을 만드는 뇌신경과학적 원리에 주목하는 새로운 관점을 제공하는 것”이라며 “발달 신경과학으로부터의 단서를 통해 인공신경망 학습의 중요한 문제를 해결함과 동시에, 인공신경망 모델을 통해 뇌의 학습 원리에 대한 통찰을 제공한다는 점에서 중요한 의미를 가진다”고 언급했다.
뇌인지과학과 천정환 석사과정이 제1 저자로, 같은 학과 이상완 교수가 공동 저자로 참여한 이번 연구는 12월 10일부터 15일까지 캐나다 벤쿠버에서 열리는 세계 최고 수준의 인공지능 학회인 제38회 신경정보처리학회(NeurIPS)에서 발표될 예정이다. (논문명: Pretraining with random noise for fast and robust learning without weight transport (가중치 수송 없는 빠르고 안정적인 신경망 학습을 위한 무작위 사전 훈련))
한편 이번 연구는 한국연구재단의 이공분야기초연구사업, 정보통신기획평가원 인재양성사업 및 KAIST 특이점교수 사업의 지원을 받아 수행됐다.
뇌 기반 인공지능의 난제 해결
인간의 두뇌는 외부 세상으로부터 감각 정보를 받아들이기 이전부터 자발적인 무작위 활동을 통해 학습을 시작한다. 우리 연구진이 개발한 기술은 뇌 모방 인공신경망에서 무작위 정보를 사전 학습시켜 실제 데이터를 접했을 때 훨씬 빠르고 정확한 학습을 가능하게 하며, 향후 뇌 기반 인공지능 및 뉴로모픽 컴퓨팅 기술 개발의 돌파구를 열어줄 것으로 기대된다.
우리 대학 뇌인지과학과 백세범 교수 연구팀이 뇌 모방 인공신경망 학습의 오래된 난제였던 가중치 수송 문제(weight transport problem)*를 해결하고, 이를 통해 생물학적 뇌 신경망에서 자원 효율적 학습이 가능한 원리를 설명했다고 23일 밝혔다.
*가중치 수송 문제: 생물학적 뇌를 모방한 인공지능 개발에 가장 큰 장애물이 되는 난제로, 현재 일반적인 인공신경망의 학습에서 생물학적 뇌와 달리 대규모의 메모리와 계산 작업이 필요한 근본적인 이유임.
지난 수십 년간 인공지능의 발전은 올해 노벨 물리학상을 받은 제프리 힌튼(Geoffery Hinton)이 제시한 오류 역전파(error backpropagation) 학습에 기반한다. 그러나 오류 역전파 학습은 생물학적 뇌에서는 가능하지 않다고 생각되어 왔는데, 이는 학습을 위한 오류 신호를 계산하기 위해 개별 뉴런들이 다음 계층의 모든 연결 정보를 알고 있어야 하는 비현실적인 가정이 필요하기 때문이다.
가중치 수송 문제라고 불리는 이 난제는 1986년 힌튼에 의해 오류 역전파 학습이 제안된 이후, DNA 구조의 발견으로 노벨 생리의학상을 받은 프랜시스 크릭(Francis Crick)에 의해 제기됐으며, 이후 자연신경망과 인공신경망 작동 원리가 근본적으로 다를 수밖에 없는 이유로 여겨진다.
인공지능과 신경과학의 경계선에서, 힌튼을 비롯한 연구자들은 가중치 수송 문제를 해결함으로써 뇌의 학습 원리를 구현할 수 있는, 생물학적으로 타당한 모델을 만들고자 하는 시도를 계속해 왔다.
지난 2016년, 영국 옥스퍼드(Oxford) 대학과 딥마인드(DeepMind) 공동 연구진은 가중치 수송을 사용하지 않고도 오류 역전파 학습이 가능하다는 개념을 최초로 제시해 학계의 주목을 받았다. 그러나, 가중치 수송을 사용하지 않는 생물학적으로 타당한 오류 역전파 학습은 학습 속도가 느리고 정확도가 낮은 등 효율성이 떨어져, 현실적인 적용에는 문제가 있었다.
연구팀은 생물학적 뇌가 외부적인 감각 경험을 하기 이전부터 내부의 자발적인 무작위 신경 활동을 통해 이미 학습을 시작한다는 점에 주목했다. 이를 모방해 연구팀은 가중치 수송이 없는 생물학적으로 타당한 신경망에 의미 없는 무작위 정보(random noise)를 사전 학습시켰다.
그 결과, 오류 역전파 학습을 위해 필수적 조건인 신경망의 순방향과 역방향 신경세포 연결 구조의 대칭성이 만들어질 수 있음을 보였다. 즉, 무작위적 사전 학습을 통해 가중치 수송 없이 학습이 가능해진 것이다.
연구팀은 실제 데이터 학습에 앞서 무작위 정보를 학습하는 것이 ‘배우는 방법을 배우는’메타 학습(meta learning)의 성질을 가진다는 것을 밝혔다. 무작위 정보를 사전 학습한 신경망은 실제 데이터를 접했을 때 훨씬 빠르고 정확한 학습을 수행하며, 가중치 수송 없이 높은 학습 효율성을 얻을 수 있음을 보였다.
백세범 교수는 “데이터 학습만이 중요하다는 기존 기계학습의 통념을 깨고, 학습 전부터 적절한 조건을 만드는 뇌신경과학적 원리에 주목하는 새로운 관점을 제공하는 것”이라며 “발달 신경과학으로부터의 단서를 통해 인공신경망 학습의 중요한 문제를 해결함과 동시에, 인공신경망 모델을 통해 뇌의 학습 원리에 대한 통찰을 제공한다는 점에서 중요한 의미를 가진다”고 언급했다.
뇌인지과학과 천정환 석사과정이 제1 저자로, 같은 학과 이상완 교수가 공동 저자로 참여한 이번 연구는 12월 10일부터 15일까지 캐나다 벤쿠버에서 열리는 세계 최고 수준의 인공지능 학회인 제38회 신경정보처리학회(NeurIPS)에서 발표될 예정이다. (논문명: Pretraining with random noise for fast and robust learning without weight transport (가중치 수송 없는 빠르고 안정적인 신경망 학습을 위한 무작위 사전 훈련))
한편 이번 연구는 한국연구재단의 이공분야기초연구사업, 정보통신기획평가원 인재양성사업 및 KAIST 특이점교수 사업의 지원을 받아 수행됐다.
2024.10.23
조회수 6129
-
 구글딥마인드와 공동연구를 통해 인공지능으로 시각을 상상하다
‘노란 포도'나 `보라색 바나나'와 같이 본 적 없는 시각 개념을 이해하고 상상하는 인공지능 능력 구현이 가능해졌다.
우리 대학 전산학부 안성진 교수 연구팀이 구글 딥마인드 및 미국 럿거스 대학교와의 국제 공동 연구를 통해 시각적 지식을 체계적으로 조합해 새로운 개념을 이해하는 인공지능 새로운 모델과 프로그램을 수행하는 벤치마크를 개발했다고 30일 밝혔다.
인간은 `보라색 포도'와 `노란 바나나' 같은 개념을 학습하고, 이를 분리한 뒤 재조합해 `노란 포도'나 `보라색 바나나'와 같이 본 적 없는 개념을 상상하는 능력이 있다. 이런 능력은 체계적 일반화 혹은 조합적 일반화라고 불리며, 범용 인공지능을 구현하는 데 있어 핵심적인 요소로 여겨진다.
체계적 일반화 문제는 1988년 미국의 저명한 인지과학자 제리 포더(Jerry Fodor)와 제논 필리쉰(Zenon Pylyshyn)이 인공신경망이 이 문제를 해결할 수 없다고 주장한 이후, 35년 동안 인공지능 딥러닝 분야에서 큰 도전 과제로 남아 있다. 이 문제는 언어뿐만 아니라 시각 정보에서도 발생하지만, 지금까지는 주로 언어의 체계적 일반화에만 초점이 맞춰져 있었고, 시각 정보에 관한 연구는 상대적으로 부족했다.
안성진 교수가 이끄는 국제 공동 연구팀은 이러한 공백을 메우고자 시각 정보에 대한 체계적 일반화를 연구할 수 있는 벤치마크를 개발했다. 시각 정보는 언어와는 달리 명확한 `단어'나 `토큰'의 구조가 없어, 이 구조를 학습하고 체계적 일반화를 달성하는 것이 큰 도전이다.
연구를 주도한 안성진 교수는 “시각 정보의 체계적 일반화가 범용 인공지능을 달성하기 위해 필수적인 능력이며 이 연구를 통해 인공지능의 추론능력과 상상능력 관련 분야의 발전을 가속할 것으로 기대한다”고 말했다.
또한, 딥마인드의 책임 연구원으로 연구에 참여한 연구원이자 현재 스위스 로잔연방공과대학교(EPFL)의 찰라 걸셔(Caglar Gulcehre) 교수는 “체계적 일반화가 가능해지면 현재보다 훨씬 적은 데이터로 더 높은 성능을 낼 수 있게 될 것이다”라고 전했다.
이번 연구는 12월 10일부터 16일까지 미국 뉴올리언스에서 열리는 제37회 신경정보처리학회(NeurIPS)에서 발표될 예정이다.
관련논문: “Imagine the Unseen World: A Benchmark for Systematic Generalization in Visual World Models”, Yeongbin Kim, Gautam Singh, Junyeong Park, Caglar Gulcehre, Sungjin Ahn, NeurIPS 23
구글딥마인드와 공동연구를 통해 인공지능으로 시각을 상상하다
‘노란 포도'나 `보라색 바나나'와 같이 본 적 없는 시각 개념을 이해하고 상상하는 인공지능 능력 구현이 가능해졌다.
우리 대학 전산학부 안성진 교수 연구팀이 구글 딥마인드 및 미국 럿거스 대학교와의 국제 공동 연구를 통해 시각적 지식을 체계적으로 조합해 새로운 개념을 이해하는 인공지능 새로운 모델과 프로그램을 수행하는 벤치마크를 개발했다고 30일 밝혔다.
인간은 `보라색 포도'와 `노란 바나나' 같은 개념을 학습하고, 이를 분리한 뒤 재조합해 `노란 포도'나 `보라색 바나나'와 같이 본 적 없는 개념을 상상하는 능력이 있다. 이런 능력은 체계적 일반화 혹은 조합적 일반화라고 불리며, 범용 인공지능을 구현하는 데 있어 핵심적인 요소로 여겨진다.
체계적 일반화 문제는 1988년 미국의 저명한 인지과학자 제리 포더(Jerry Fodor)와 제논 필리쉰(Zenon Pylyshyn)이 인공신경망이 이 문제를 해결할 수 없다고 주장한 이후, 35년 동안 인공지능 딥러닝 분야에서 큰 도전 과제로 남아 있다. 이 문제는 언어뿐만 아니라 시각 정보에서도 발생하지만, 지금까지는 주로 언어의 체계적 일반화에만 초점이 맞춰져 있었고, 시각 정보에 관한 연구는 상대적으로 부족했다.
안성진 교수가 이끄는 국제 공동 연구팀은 이러한 공백을 메우고자 시각 정보에 대한 체계적 일반화를 연구할 수 있는 벤치마크를 개발했다. 시각 정보는 언어와는 달리 명확한 `단어'나 `토큰'의 구조가 없어, 이 구조를 학습하고 체계적 일반화를 달성하는 것이 큰 도전이다.
연구를 주도한 안성진 교수는 “시각 정보의 체계적 일반화가 범용 인공지능을 달성하기 위해 필수적인 능력이며 이 연구를 통해 인공지능의 추론능력과 상상능력 관련 분야의 발전을 가속할 것으로 기대한다”고 말했다.
또한, 딥마인드의 책임 연구원으로 연구에 참여한 연구원이자 현재 스위스 로잔연방공과대학교(EPFL)의 찰라 걸셔(Caglar Gulcehre) 교수는 “체계적 일반화가 가능해지면 현재보다 훨씬 적은 데이터로 더 높은 성능을 낼 수 있게 될 것이다”라고 전했다.
이번 연구는 12월 10일부터 16일까지 미국 뉴올리언스에서 열리는 제37회 신경정보처리학회(NeurIPS)에서 발표될 예정이다.
관련논문: “Imagine the Unseen World: A Benchmark for Systematic Generalization in Visual World Models”, Yeongbin Kim, Gautam Singh, Junyeong Park, Caglar Gulcehre, Sungjin Ahn, NeurIPS 23
2023.11.30
조회수 7992
-
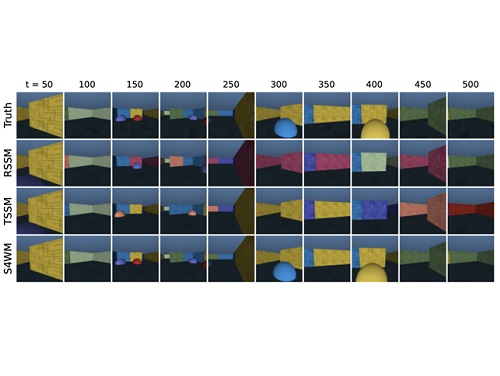 트랜스포머 대체할 차세대 월드모델 기술 세계 최초 개발
우리 대학 전산학부 안성진 교수 연구팀이 미국 럿거스 대학교와 협력하여 트랜스포머 및 재귀신경망 기반의 월드모델을 대체할 차세대 에이전트 월드모델 기술을 세계 최초로 개발했다.
월드모델은 인간의 뇌가 현실 세계의 경험을 바탕으로 환경 모델을 구축하는 과정과 유사하다. 이러한 월드모델을 활용하는 인공지능은 특정 행동의 결과를 미리 시뮬레이션해보고 다양한 가설을 검증할 수 있어, 범용 인공지능의 핵심 구성 요소로 여겨진다.
특히, 로봇이나 자율주행 차량과 같은 인공지능 에이전트는 학습을 위해 여러 가지 행동을 시도해 보아야하는데, 이는 위험성과 고장 가능성을 높인다는 단점을 갖는다. 이에 반해, 월드모델을 갖춘 인공지능은 실세계 상호작용 없이도 상상모델 속에서 학습을 가능케 해 큰 이점을 제공한다.
그러나 월드모델은 자연어처리 등에서 큰 발전을 가능하게 한 트랜스포머와 S4와 같은 새로운 시퀀스 모델링 아키텍처의 적용에 한계가 있었다. 이로 인해, 대부분의 월드모델이 성능과 효율성 면에서 제약이 있는 고전적인 재귀적 신경망에 의존하고 있었고 안성진 교수팀은 작년 세계최초로 트랜스포머 기반의 월드모델을 개발하였으나 추론 계산속도나 메모리능력에서 여전히 개선할 문제를 갖고 있었다.
이러한 문제를 해결하기 위해, 안성진 교수가 이끄는 KAIST와 럿거스 대학교 공동연구팀은 재귀적 신경망과 트랜스포머 기반 월드모델의 단점을 극복한 새로운 월드모델의 개발에 성공했다. 연구팀은 S4 시퀀스 모델에 기반한 S4 World Model (S4WM)을 개발하여, 재귀적 신경망의 최대 단점인 병렬처리가 가능한 시퀀스 학습이 불가능하다는 문제를 해결하였다. 또한, 재귀적 신경망의 장점인 빠른 추론시간을 유지하도록 하여 느린 추론 시간을 제공하는 트랜스포머 기반 월드모델의 단점을 극복했다.
연구를 주도한 안성진 교수는 "병렬 학습과 빠른 추론이 가능한 에이전트 월드모델을 세계 최초로 개발했다ˮ며, 이는 "모델기반 강화학습 능력을 획기적으로 개선해 지능형 로봇, 자율주행 차량, 그리고 자율형 인공지능 에이전트 기술 전반에 비용절감과 성능 향상이 예상된다ˮ고 밝혔다.
이번 연구는 12월 10일부터 16일까지 미국 뉴올리언스에서 열리는 세계 최고 수준의 인공지능 학회인 제37회 신경정보처리학회(NeurIPS)에서 발표될 예정이다.
관련논문: “Facing off World Model Backbones: RNNs, Transformers, and S4”Fei Deng, Junyeong Park, Sungjin Ahn, NeurIPS 23, https://arxiv.org/abs/2307.02064
트랜스포머 대체할 차세대 월드모델 기술 세계 최초 개발
우리 대학 전산학부 안성진 교수 연구팀이 미국 럿거스 대학교와 협력하여 트랜스포머 및 재귀신경망 기반의 월드모델을 대체할 차세대 에이전트 월드모델 기술을 세계 최초로 개발했다.
월드모델은 인간의 뇌가 현실 세계의 경험을 바탕으로 환경 모델을 구축하는 과정과 유사하다. 이러한 월드모델을 활용하는 인공지능은 특정 행동의 결과를 미리 시뮬레이션해보고 다양한 가설을 검증할 수 있어, 범용 인공지능의 핵심 구성 요소로 여겨진다.
특히, 로봇이나 자율주행 차량과 같은 인공지능 에이전트는 학습을 위해 여러 가지 행동을 시도해 보아야하는데, 이는 위험성과 고장 가능성을 높인다는 단점을 갖는다. 이에 반해, 월드모델을 갖춘 인공지능은 실세계 상호작용 없이도 상상모델 속에서 학습을 가능케 해 큰 이점을 제공한다.
그러나 월드모델은 자연어처리 등에서 큰 발전을 가능하게 한 트랜스포머와 S4와 같은 새로운 시퀀스 모델링 아키텍처의 적용에 한계가 있었다. 이로 인해, 대부분의 월드모델이 성능과 효율성 면에서 제약이 있는 고전적인 재귀적 신경망에 의존하고 있었고 안성진 교수팀은 작년 세계최초로 트랜스포머 기반의 월드모델을 개발하였으나 추론 계산속도나 메모리능력에서 여전히 개선할 문제를 갖고 있었다.
이러한 문제를 해결하기 위해, 안성진 교수가 이끄는 KAIST와 럿거스 대학교 공동연구팀은 재귀적 신경망과 트랜스포머 기반 월드모델의 단점을 극복한 새로운 월드모델의 개발에 성공했다. 연구팀은 S4 시퀀스 모델에 기반한 S4 World Model (S4WM)을 개발하여, 재귀적 신경망의 최대 단점인 병렬처리가 가능한 시퀀스 학습이 불가능하다는 문제를 해결하였다. 또한, 재귀적 신경망의 장점인 빠른 추론시간을 유지하도록 하여 느린 추론 시간을 제공하는 트랜스포머 기반 월드모델의 단점을 극복했다.
연구를 주도한 안성진 교수는 "병렬 학습과 빠른 추론이 가능한 에이전트 월드모델을 세계 최초로 개발했다ˮ며, 이는 "모델기반 강화학습 능력을 획기적으로 개선해 지능형 로봇, 자율주행 차량, 그리고 자율형 인공지능 에이전트 기술 전반에 비용절감과 성능 향상이 예상된다ˮ고 밝혔다.
이번 연구는 12월 10일부터 16일까지 미국 뉴올리언스에서 열리는 세계 최고 수준의 인공지능 학회인 제37회 신경정보처리학회(NeurIPS)에서 발표될 예정이다.
관련논문: “Facing off World Model Backbones: RNNs, Transformers, and S4”Fei Deng, Junyeong Park, Sungjin Ahn, NeurIPS 23, https://arxiv.org/abs/2307.02064
2023.11.09
조회수 6945
-
 인공지능 챗봇 이미지 데이터 훈련 비용 최소화하다
최근 다양한 분야에서 인공지능 심층 학습(딥러닝) 기술을 활용한 서비스가 급속히 증가하고 있다. GPT와 같은 거대 언어 모델을 훈련하기 위해서는 수백 대의 GPU와 몇 주 이상의 시간이 필요하다고 알려져 있다. 따라서, 심층신경망 훈련 비용을 최소화하는 방법 개발이 요구되고 있다.
우리 대학 전산학부 이재길 교수 연구팀이 심층신경망 훈련 비용을 최소화할 수 있도록 훈련 데이터의 양을 줄이는 새로운 데이터 선택 기술을 개발했다고 2일 밝혔다.
일반적으로 대용량의 심층 학습용 훈련 데이터는 레이블 오류(예를 들어, 강아지 사진이 `고양이'라고 잘못 표기되어 있음)를 포함한다. 최신 인공지능 방법론인 재(再)레이블링(Re-labeling) 학습법은 훈련 도중 레이블 오류를 스스로 수정하면서 높은 심층신경망 성능을 달성하는데, 레이블 오류를 수정하기 위한 추가적인 과정들로 인해 훈련에 필요한 시간이 더욱 증가한다는 단점이 있다. 한편 막대한 훈련 시간을 줄이려는 방법으로 중복되거나 성능 향상에 도움이 되지 않는 데이터를 제거해 훈련 데이터의 크기를 줄이는 핵심 집합 선별(coreset selection) 방식이 큰 주목을 받고 있다. 그러나 기존 핵심 집합 선별 방식은 훈련 데이터에 레이블 오류가 없다고 가정한 표준 학습법을 위해 개발됐고, 재레이블링 학습법을 위한 핵심 집합 선별 방식에 관한 연구는 부족한 실정이다.
이재길 교수팀이 개발한 기술은 레이블 오류를 스스로 수정하는 최신 재레이블링 학습법을 위해 핵심 집합 선별을 수행하여 심층 학습 훈련 비용을 최소화할 수 있도록 해준다. 따라서, 레이블 오류가 포함된 현실적인 훈련 데이터를 지원하므로 실용성이 매우 높다.
또한 이 교수팀은 특정 데이터의 레이블 오류 수정 정확도가 해당 데이터의 이웃 데이터의 신뢰도와 높은 상관관계가 있음을 발견했다. 즉, 이웃 데이터의 신뢰도가 높으면 레이블 오류 수정 정확도가 커지는 경향이 있다. 이웃 데이터의 신뢰도는 심층신경망의 충분한 훈련 전에도 측정할 수 있으므로, 각 데이터의 레이블 수정 가능 여부를 예측할 수 있게 된다. 연구팀은 이러한 발견을 기반으로 전체 훈련 데이터의 총합 이웃 신뢰도를 최대화하는 데이터 부분 집합을 선별해 레이블 수정 정확도와 일반화 성능을 최대화하는 `재레이블링을 위한 핵심 집합 선별'을 제안했다. 총합 이웃 신뢰도를 최대화하는 부분 집합을 찾는 조합 최적화 문제의 효율적인 해법을 위해 총합 이웃 신뢰도를 가장 증가시키는 데이터를 차례차례 선택하는 탐욕 알고리즘(greedy algorithm)을 도입했다.
연구팀은 이미지 분류 문제에 대해 다양한 실세계의 훈련 데이터를 사용해 방법론을 검증했다. 그 결과, 레이블 오류가 없다는 가정에 따른 표준 학습법에서는 최대 9%, 재레이블링 학습법에서는 최대 21% 최종 예측 정확도가 기존 방법론에 비해 향상되었고, 모든 범위의 데이터 선별 비율에서 일관되게 최고 성능을 달성했다. 또한, 총합 이웃 신뢰도를 최대화한 효율적 탐욕 알고리즘을 통해 기존 방법론에 비해 획기적으로 시간을 줄이고 수백만 장의 이미지를 포함하는 초대용량 훈련 데이터에도 쉽게 확장될 수 있음을 확인했다.
제1 저자인 박동민 박사과정 학생은 "이번 기술은 오류를 포함한 데이터에 대한 최신 인공지능 방법론의 훈련 가속화를 위한 획기적인 방법ˮ 이라면서 "다양한 데이터 상황에서의 강건성이 검증됐기 때문에, 실생활의 기계 학습 문제에 폭넓게 적용될 수 있어 전반적인 심층 학습의 훈련 데이터 준비 비용 절감에 기여할 것ˮ 이라고 밝혔다.
연구팀을 지도한 이재길 교수도 "이 기술이 파이토치(PyTorch) 혹은 텐서플로우(TensorFlow)와 같은 기존의 심층 학습 라이브러리에 추가되면 기계 학습 및 심층 학습 학계에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
우리 대학 데이터사이언스대학원에 재학 중인 박동민 박사과정 학생이 제1 저자, 최설아 석사과정, 김도영 박사과정 학생이 제2, 제3 저자로 각각 참여한 이번 연구는 최고권위 국제학술대회 `신경정보처리시스템학회(NeurIPS) 2023'에서 올 12월 발표될 예정이다. (논문명 : Robust Data Pruning under Label Noise via Maximizing Re-labeling Accuracy)
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 SW컴퓨팅산업원천기술개발사업 SW스타랩 과제로 개발한 연구성과 결과물(2020-0-00862, DB4DL: 딥러닝 지원 고사용성 및 고성능 분산 인메모리 DBMS 개발)이다.
인공지능 챗봇 이미지 데이터 훈련 비용 최소화하다
최근 다양한 분야에서 인공지능 심층 학습(딥러닝) 기술을 활용한 서비스가 급속히 증가하고 있다. GPT와 같은 거대 언어 모델을 훈련하기 위해서는 수백 대의 GPU와 몇 주 이상의 시간이 필요하다고 알려져 있다. 따라서, 심층신경망 훈련 비용을 최소화하는 방법 개발이 요구되고 있다.
우리 대학 전산학부 이재길 교수 연구팀이 심층신경망 훈련 비용을 최소화할 수 있도록 훈련 데이터의 양을 줄이는 새로운 데이터 선택 기술을 개발했다고 2일 밝혔다.
일반적으로 대용량의 심층 학습용 훈련 데이터는 레이블 오류(예를 들어, 강아지 사진이 `고양이'라고 잘못 표기되어 있음)를 포함한다. 최신 인공지능 방법론인 재(再)레이블링(Re-labeling) 학습법은 훈련 도중 레이블 오류를 스스로 수정하면서 높은 심층신경망 성능을 달성하는데, 레이블 오류를 수정하기 위한 추가적인 과정들로 인해 훈련에 필요한 시간이 더욱 증가한다는 단점이 있다. 한편 막대한 훈련 시간을 줄이려는 방법으로 중복되거나 성능 향상에 도움이 되지 않는 데이터를 제거해 훈련 데이터의 크기를 줄이는 핵심 집합 선별(coreset selection) 방식이 큰 주목을 받고 있다. 그러나 기존 핵심 집합 선별 방식은 훈련 데이터에 레이블 오류가 없다고 가정한 표준 학습법을 위해 개발됐고, 재레이블링 학습법을 위한 핵심 집합 선별 방식에 관한 연구는 부족한 실정이다.
이재길 교수팀이 개발한 기술은 레이블 오류를 스스로 수정하는 최신 재레이블링 학습법을 위해 핵심 집합 선별을 수행하여 심층 학습 훈련 비용을 최소화할 수 있도록 해준다. 따라서, 레이블 오류가 포함된 현실적인 훈련 데이터를 지원하므로 실용성이 매우 높다.
또한 이 교수팀은 특정 데이터의 레이블 오류 수정 정확도가 해당 데이터의 이웃 데이터의 신뢰도와 높은 상관관계가 있음을 발견했다. 즉, 이웃 데이터의 신뢰도가 높으면 레이블 오류 수정 정확도가 커지는 경향이 있다. 이웃 데이터의 신뢰도는 심층신경망의 충분한 훈련 전에도 측정할 수 있으므로, 각 데이터의 레이블 수정 가능 여부를 예측할 수 있게 된다. 연구팀은 이러한 발견을 기반으로 전체 훈련 데이터의 총합 이웃 신뢰도를 최대화하는 데이터 부분 집합을 선별해 레이블 수정 정확도와 일반화 성능을 최대화하는 `재레이블링을 위한 핵심 집합 선별'을 제안했다. 총합 이웃 신뢰도를 최대화하는 부분 집합을 찾는 조합 최적화 문제의 효율적인 해법을 위해 총합 이웃 신뢰도를 가장 증가시키는 데이터를 차례차례 선택하는 탐욕 알고리즘(greedy algorithm)을 도입했다.
연구팀은 이미지 분류 문제에 대해 다양한 실세계의 훈련 데이터를 사용해 방법론을 검증했다. 그 결과, 레이블 오류가 없다는 가정에 따른 표준 학습법에서는 최대 9%, 재레이블링 학습법에서는 최대 21% 최종 예측 정확도가 기존 방법론에 비해 향상되었고, 모든 범위의 데이터 선별 비율에서 일관되게 최고 성능을 달성했다. 또한, 총합 이웃 신뢰도를 최대화한 효율적 탐욕 알고리즘을 통해 기존 방법론에 비해 획기적으로 시간을 줄이고 수백만 장의 이미지를 포함하는 초대용량 훈련 데이터에도 쉽게 확장될 수 있음을 확인했다.
제1 저자인 박동민 박사과정 학생은 "이번 기술은 오류를 포함한 데이터에 대한 최신 인공지능 방법론의 훈련 가속화를 위한 획기적인 방법ˮ 이라면서 "다양한 데이터 상황에서의 강건성이 검증됐기 때문에, 실생활의 기계 학습 문제에 폭넓게 적용될 수 있어 전반적인 심층 학습의 훈련 데이터 준비 비용 절감에 기여할 것ˮ 이라고 밝혔다.
연구팀을 지도한 이재길 교수도 "이 기술이 파이토치(PyTorch) 혹은 텐서플로우(TensorFlow)와 같은 기존의 심층 학습 라이브러리에 추가되면 기계 학습 및 심층 학습 학계에 큰 파급효과를 낼 수 있을 것이다ˮ고 말했다.
우리 대학 데이터사이언스대학원에 재학 중인 박동민 박사과정 학생이 제1 저자, 최설아 석사과정, 김도영 박사과정 학생이 제2, 제3 저자로 각각 참여한 이번 연구는 최고권위 국제학술대회 `신경정보처리시스템학회(NeurIPS) 2023'에서 올 12월 발표될 예정이다. (논문명 : Robust Data Pruning under Label Noise via Maximizing Re-labeling Accuracy)
한편, 이 기술은 과학기술정보통신부 재원으로 정보통신기획평가원의 지원을 받아 SW컴퓨팅산업원천기술개발사업 SW스타랩 과제로 개발한 연구성과 결과물(2020-0-00862, DB4DL: 딥러닝 지원 고사용성 및 고성능 분산 인메모리 DBMS 개발)이다.
2023.11.02
조회수 6553
-
 인공지능으로 정확한 세포 이미지 분석..세계 AI 생명과학 분야 대회 우승
우리 대학 김재철AI대학원 윤세영 교수 연구팀이 세계 최고 수준의 인공지능(AI) 학회인 `뉴립스(NeurIPS, 신경정보처리시스템학회) 2022'에서 개최된 `세포 인식기술 경진대회'에서 취리히 리서치센터, 베이징대, 칭화대, 미시간대 등 다수의 세계 연구팀을 모두 제치고 1위로 우승을 달성했다고 28일 밝혔다.
뉴립스는 국제머신러닝학회(ICML), 표현학습국제학회(ICLR)와 함께 세계적인 권위의 기계학습 및 인공지능 분야 학회로 꼽힌다. 뛰어난 연구자들이 제출하는 논문들도 승인될 확률이 25%에 불과할 정도로 학회의 심사를 통과하기 어려운 것으로 알려져 있다.
윤세영 교수 연구팀은 이번 학회에서 `세포 인식기술 경진대회(Cell Segmentation Challenge)'에 참가했다. 이기훈(박사과정), 김상묵(박사과정), 김준기(석사과정)의 3명의 연구원으로 구성된 OSILAB 팀은 초고해상도의 현미경 이미지에서 인공지능이 자동으로 세포를 인식하는 MEDIAR(메디아) 기술을 개발해 2위 팀과 큰 성능 격차로 1위를 달성했다.
세포 인식은 생명 및 의료 분야의 시작이 되는 중요한 기반 기술이지만, 현미경의 측정 기술과 세포의 종류 등에 따라 다양한 형태로 관찰될 수 있어 인공지능이 학습하기 어려운 분야로 알려져 있다. 세포 인식기술 경진대회는 이러한 한계를 극복하기 위해 초고해상도의 현미경 이미지에서 제한된 시간 안에 세포를 인식하는 기술을 주제로 개최됐다.
연구팀은 기계학습에서 소수의 학습 데이터를 더 효과적으로 활용해 성능을 높이는 데이터 기반(Data-Centric) 접근법과 인공신경망의 구조를 개선하는 모델 기반(Model-Centric) 접근법을 종합적으로 활용해 MEDIAR(메디아) 기술을 개발했다. 개발된 인공지능 기술을 통해 정확하게 세포를 인식하고 고해상도 이미지를 빠르게 연산함으로써 대회에서 좋은 성과를 얻을 수 있었다. 지도교수인 KAIST 김재철AI대학원 윤세영 교수는 “MEDIAR는 세포 인식기술 경진대회를 통해 개발됐지만 기상 예측이나 자율주행과 같이 이미지 속 다양한 형태의 개체 인식을 통해 정확한 예측이 필요한 많은 분야에 적용할 수 있다”라고 향후 다양한 활용을 기대했다.
팀을 이끌었던 이기훈 박사과정은 "처음 접하는 분야에서도 성과를 낼 수 있었던 것은 평소 기본기를 중요시하는 교수님의 가르침 덕분ˮ이라며 "새로운 문제에 끊임없이 도전하자는 것이 연구팀의 기본 정신ˮ이라고 강조했다. 이어 같은 연구실 김상묵 박사과정은 "연구 과정에서 많은 실패가 있었지만, 세상에 꼭 필요한 기술이라는 생각으로 끝까지 노력했다ˮ라며 "혼자서라면 절대 해내지 못했던 결과인 만큼 팀원들에게 정말 감사하다ˮ라고 수상 소감을 전했다. 같은 연구실 김준기 석사과정은 "팀원들과 이룬 성과가 의료 분야 인공지능이 겪는 현실의 문제를 해결하는 데 도움이 될 수 있기를 바란다”라고 밝혔다.
연구팀은 생명과학 분야 연구의 발전을 돕기 위해 개발된 기술을 전면 오픈소스로 공개한다고 밝혔다. 학습된 인공지능 모델과 인공지능을 구현하기 위한 프로그램의 소스 코드는 개발자 플랫폼인 깃허브 (GitHub)를 통해 이용할 수 있다.
인공지능으로 정확한 세포 이미지 분석..세계 AI 생명과학 분야 대회 우승
우리 대학 김재철AI대학원 윤세영 교수 연구팀이 세계 최고 수준의 인공지능(AI) 학회인 `뉴립스(NeurIPS, 신경정보처리시스템학회) 2022'에서 개최된 `세포 인식기술 경진대회'에서 취리히 리서치센터, 베이징대, 칭화대, 미시간대 등 다수의 세계 연구팀을 모두 제치고 1위로 우승을 달성했다고 28일 밝혔다.
뉴립스는 국제머신러닝학회(ICML), 표현학습국제학회(ICLR)와 함께 세계적인 권위의 기계학습 및 인공지능 분야 학회로 꼽힌다. 뛰어난 연구자들이 제출하는 논문들도 승인될 확률이 25%에 불과할 정도로 학회의 심사를 통과하기 어려운 것으로 알려져 있다.
윤세영 교수 연구팀은 이번 학회에서 `세포 인식기술 경진대회(Cell Segmentation Challenge)'에 참가했다. 이기훈(박사과정), 김상묵(박사과정), 김준기(석사과정)의 3명의 연구원으로 구성된 OSILAB 팀은 초고해상도의 현미경 이미지에서 인공지능이 자동으로 세포를 인식하는 MEDIAR(메디아) 기술을 개발해 2위 팀과 큰 성능 격차로 1위를 달성했다.
세포 인식은 생명 및 의료 분야의 시작이 되는 중요한 기반 기술이지만, 현미경의 측정 기술과 세포의 종류 등에 따라 다양한 형태로 관찰될 수 있어 인공지능이 학습하기 어려운 분야로 알려져 있다. 세포 인식기술 경진대회는 이러한 한계를 극복하기 위해 초고해상도의 현미경 이미지에서 제한된 시간 안에 세포를 인식하는 기술을 주제로 개최됐다.
연구팀은 기계학습에서 소수의 학습 데이터를 더 효과적으로 활용해 성능을 높이는 데이터 기반(Data-Centric) 접근법과 인공신경망의 구조를 개선하는 모델 기반(Model-Centric) 접근법을 종합적으로 활용해 MEDIAR(메디아) 기술을 개발했다. 개발된 인공지능 기술을 통해 정확하게 세포를 인식하고 고해상도 이미지를 빠르게 연산함으로써 대회에서 좋은 성과를 얻을 수 있었다. 지도교수인 KAIST 김재철AI대학원 윤세영 교수는 “MEDIAR는 세포 인식기술 경진대회를 통해 개발됐지만 기상 예측이나 자율주행과 같이 이미지 속 다양한 형태의 개체 인식을 통해 정확한 예측이 필요한 많은 분야에 적용할 수 있다”라고 향후 다양한 활용을 기대했다.
팀을 이끌었던 이기훈 박사과정은 "처음 접하는 분야에서도 성과를 낼 수 있었던 것은 평소 기본기를 중요시하는 교수님의 가르침 덕분ˮ이라며 "새로운 문제에 끊임없이 도전하자는 것이 연구팀의 기본 정신ˮ이라고 강조했다. 이어 같은 연구실 김상묵 박사과정은 "연구 과정에서 많은 실패가 있었지만, 세상에 꼭 필요한 기술이라는 생각으로 끝까지 노력했다ˮ라며 "혼자서라면 절대 해내지 못했던 결과인 만큼 팀원들에게 정말 감사하다ˮ라고 수상 소감을 전했다. 같은 연구실 김준기 석사과정은 "팀원들과 이룬 성과가 의료 분야 인공지능이 겪는 현실의 문제를 해결하는 데 도움이 될 수 있기를 바란다”라고 밝혔다.
연구팀은 생명과학 분야 연구의 발전을 돕기 위해 개발된 기술을 전면 오픈소스로 공개한다고 밝혔다. 학습된 인공지능 모델과 인공지능을 구현하기 위한 프로그램의 소스 코드는 개발자 플랫폼인 깃허브 (GitHub)를 통해 이용할 수 있다.
2022.12.28
조회수 11457
-
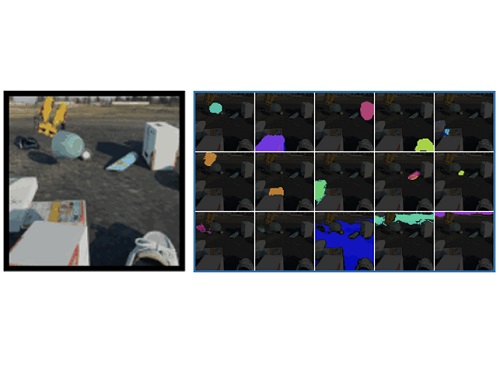 세계 최초로 사람처럼 사물의 개념을 스스로 학습하는 장면 인식 기술 개발
우리 대학 전산학부 안성진 교수 연구팀이 미국 럿거스(Rutgers) 대학교와 공동연구를 통해 사람의 라벨링 없이 스스로 영상 속 객체를 식별할 수 있는 인공지능 기술을 개발했다고 1일 밝혔다. 이 모델은 복잡한 영상에서 각 장면의 객체들에 대한 명시적인 라벨링 없이도 객체를 식별하는 최초의 인공지능 모델이다.
기계가 주변 환경을 지능적으로 인지하고 추론하기 위해서는 시각적 장면을 구성하는 객체들과 그들의 관계를 파악하는 능력이 필수적이다. 하지만 이 분야의 연구는 대부분 영상의 각 픽셀에 대응하는 객체의 라벨을 사람이 일일이 표시해야 하는 지도적 학습 방식을 사용했다. 이 같은 수작업은 오류가 발생하기 쉽고 많은 시간과 비용을 요구한다는 단점이 있다.
이에 반해 이번에 연구팀이 개발한 기술은 인간과 유사하게 환경에 대한 관측만으로 객체의 개념을 스스로 자가 학습하는 방식을 취한다. 이렇게 인간의 지도 없이 스스로 객체의 개념을 학습할 수 있는 인공지능은 차세대 인지 기술의 핵심으로 기대돼왔다.
비지도 학습을 이용한 이전 연구들은 단순한 객체 형태와 배경이 명확히 구분될 수 있는 단순한 장면에서만 객체를 식별하는 단점이 있었다. 이와 달리 이번에 안성진 교수 연구팀이 개발한 기술은 복잡한 형태의 많은 객체가 존재하는 사실적인 장면에도 적용될 수 있는 최초의 모델이다.
이 연구는 그림 인공지능 소프트웨어인 DALL-E와 같이 텍스트 입력을 통해 사실적인 이미지를 생성할 수 있는 이미지 생성 연구에서 영감을 얻었다. 연구팀은 텍스트를 입력하는 대신, 모델이 장면에서 객체를 감지하고 그 객체의 표상(representation)으로부터 이미지를 생성하는 방식으로 모델을 학습시켰다. 또한, 모델에 DALL-E와 유사한 트랜스포머 디코더를 사용하는 것이 사실적이고 복잡한 영상을 처리할 수 있게 한 주요 요인이라고 밝혔다.
연구팀은 복잡하고 정제되지 않은 영상뿐만 아니라, 많은 물고기가 있는 수족관과 교통이 혼잡한 도로의 상황을 담은 유튜브 영상과 같이 복잡한 실제 영상에서도 모델의 성능을 측정했다. 그 결과, 제시된 모델이 기존 모델보다 객체를 훨씬 더 정확하게 분할하고 일반화하는 것을 확인할 수 있었다.
연구팀을 이끈 안성진 교수는 "인간과 유사한 자가 학습 방식으로 상황을 인지하고 해석하는 혁신적인 기술ˮ이라며 "시각적 상황인지 능력을 획기적으로 개선해 지능형 로봇 분야, 자율 주행 분야뿐만 아니라 시각적 인공지능 기술 전반에 비용 절감과 성능향상을 가져올 수 있다ˮ고 말했다.
이번 연구는 미국 뉴올리언스에서 지난 11월 28일부터 개최되어 12월 9일까지 진행 예정인 세계 최고 수준의 기계학습(머신러닝) 학회인 제36회 신경정보처리학회(NeurIPS)에서 발표됐다.
세계 최초로 사람처럼 사물의 개념을 스스로 학습하는 장면 인식 기술 개발
우리 대학 전산학부 안성진 교수 연구팀이 미국 럿거스(Rutgers) 대학교와 공동연구를 통해 사람의 라벨링 없이 스스로 영상 속 객체를 식별할 수 있는 인공지능 기술을 개발했다고 1일 밝혔다. 이 모델은 복잡한 영상에서 각 장면의 객체들에 대한 명시적인 라벨링 없이도 객체를 식별하는 최초의 인공지능 모델이다.
기계가 주변 환경을 지능적으로 인지하고 추론하기 위해서는 시각적 장면을 구성하는 객체들과 그들의 관계를 파악하는 능력이 필수적이다. 하지만 이 분야의 연구는 대부분 영상의 각 픽셀에 대응하는 객체의 라벨을 사람이 일일이 표시해야 하는 지도적 학습 방식을 사용했다. 이 같은 수작업은 오류가 발생하기 쉽고 많은 시간과 비용을 요구한다는 단점이 있다.
이에 반해 이번에 연구팀이 개발한 기술은 인간과 유사하게 환경에 대한 관측만으로 객체의 개념을 스스로 자가 학습하는 방식을 취한다. 이렇게 인간의 지도 없이 스스로 객체의 개념을 학습할 수 있는 인공지능은 차세대 인지 기술의 핵심으로 기대돼왔다.
비지도 학습을 이용한 이전 연구들은 단순한 객체 형태와 배경이 명확히 구분될 수 있는 단순한 장면에서만 객체를 식별하는 단점이 있었다. 이와 달리 이번에 안성진 교수 연구팀이 개발한 기술은 복잡한 형태의 많은 객체가 존재하는 사실적인 장면에도 적용될 수 있는 최초의 모델이다.
이 연구는 그림 인공지능 소프트웨어인 DALL-E와 같이 텍스트 입력을 통해 사실적인 이미지를 생성할 수 있는 이미지 생성 연구에서 영감을 얻었다. 연구팀은 텍스트를 입력하는 대신, 모델이 장면에서 객체를 감지하고 그 객체의 표상(representation)으로부터 이미지를 생성하는 방식으로 모델을 학습시켰다. 또한, 모델에 DALL-E와 유사한 트랜스포머 디코더를 사용하는 것이 사실적이고 복잡한 영상을 처리할 수 있게 한 주요 요인이라고 밝혔다.
연구팀은 복잡하고 정제되지 않은 영상뿐만 아니라, 많은 물고기가 있는 수족관과 교통이 혼잡한 도로의 상황을 담은 유튜브 영상과 같이 복잡한 실제 영상에서도 모델의 성능을 측정했다. 그 결과, 제시된 모델이 기존 모델보다 객체를 훨씬 더 정확하게 분할하고 일반화하는 것을 확인할 수 있었다.
연구팀을 이끈 안성진 교수는 "인간과 유사한 자가 학습 방식으로 상황을 인지하고 해석하는 혁신적인 기술ˮ이라며 "시각적 상황인지 능력을 획기적으로 개선해 지능형 로봇 분야, 자율 주행 분야뿐만 아니라 시각적 인공지능 기술 전반에 비용 절감과 성능향상을 가져올 수 있다ˮ고 말했다.
이번 연구는 미국 뉴올리언스에서 지난 11월 28일부터 개최되어 12월 9일까지 진행 예정인 세계 최고 수준의 기계학습(머신러닝) 학회인 제36회 신경정보처리학회(NeurIPS)에서 발표됐다.
2022.12.02
조회수 8784
-
 세계 최고 수준의 딥러닝 의사결정 설명기술 개발
우리 대학 김재철AI대학원 최재식 교수(㈜인이지 대표이사) 연구팀이 인공지능 딥러닝의 의사결정에 큰 영향을 미치는 입력 변수의 기여도를 계산하는 세계 최고 수준의 기술을 개발했다고 23일 밝혔다.
최근 딥러닝 모델은 문서 자동 번역이나 자율 주행 등 실생활에 널리 보급되고 활용되는 추세 및 발전에도 불구하고 비선형적이고 복잡한 모델의 구조와 고차원의 입력 데이터로 인해 정확한 모델 예측의 근거를 제시하기 어렵다. 이처럼 부족한 설명성은 딥러닝이 국방, 의료, 금융과 같이 의사결정에 대한 근거가 필요한 중요한 작업에 대한 적용을 어렵게 한다. 따라서 적용 분야의 확장을 위해 딥러닝의 부족한 설명성은 반드시 해결해야 할 문제다.
최교수 연구팀은 딥러닝 모델이 국소적인 입력 공간에서 보이는 입력 데이터와 예측 사이의 관계를 기반으로, 입력 데이터의 특징 중 모델 예측의 기여도가 높은 특징만을 점진적으로 추출해나가는 알고리즘과 그 과정에서의 입력과 예측 사이의 관계를 종합하는 방법을 고안해 모델의 예측 과정에 기여하는 입력 특징의 정확한 기여도를 계산했다. 해당 기술은 모델 구조에 대한 의존성이 없어 다양한 기존 학습 모델에서도 적용이 가능하며, 딥러닝 예측 모델의 판단 근거를 제공함으로써 신뢰도를 높여 딥러닝 모델의 활용성에도 크게 기여할 것으로 기대된다.
㈜인이지의 전기영 연구원, 우리 대학 김재철AI대학원의 정해동 연구원이 공동 제1 저자로 참여한 이번 연구는 오는 12월 1일, 국제 학술대회 `신경정보처리학회(Neural Information Processing Systems, NeurIPS) 2022'에서 발표될 예정이다.
모델의 예측에 대한 입력 특징의 기여도를 계산하는 문제는 해석이 불가능한 딥러닝 모델의 작동 방식을 설명하는 직관적인 방법 중 하나다. 특히, 이미지 데이터를 다루는 문제에서는 모델의 예측 과정에 많이 기여한 부분을 강조하는 방식으로 시각화해 설명을 제공한다.
딥러닝 예측 모델의 입력 기여도를 정확하게 계산하기 위해서 모델의 경사도를 이용하거나, 입력 섭동(행동을 다스림)을 이용하는 등의 연구가 활발히 진행되고 있다. 그러나 경사도를 이용한 방식의 경우 결과물에 잡음이 많아 신뢰성을 확보하기 어렵고, 입력 섭동을 이용하는 경우 모든 경우의 섭동을 시도해야 하지만 너무 많은 연산을 요구하기 때문에, 근사치를 추정한 결과만을 얻을 수 있다.
연구팀은 이러한 문제 해결을 위해 입력 데이터의 특징 중에서 모델의 예측과 연관성이 적은 특징을 점진적으로 제거해나가는 증류 알고리즘을 개발했다. 증류 알고리즘은 딥러닝 모델이 국소적으로 보이는 입력 데이터와 예측 사이의 관계에 기반해 상대적으로 예측에 기여도가 적은 특징을 선별 및 제거하며, 이러한 과정의 반복을 통해 증류된 입력 데이터에는 기여도가 높은 특징만 남게 된다. 또한, 해당 과정을 통해 얻게 되는 변형된 데이터에 대한 국소적 입력 기여도를 종합해 신뢰도 높은 최종 입력 기여도를 산출한다.
연구팀의 이러한 입력 기여도 측정 기술은 산업공정 최적화 프로젝트에 적용해 딥러닝 모델이 예측 결과를 도출하기 위해서 어떤 입력 특징에 주목하는지 찾을 수 있었다. 또한 딥러닝 모델의 구조에 상관없이 적용할 수 있는 이 기술을 바탕으로 복잡한 공정 내부의 다양한 예측변수 간 상관관계를 정확하게 분석하고 예측함으로써 공정 최적화(에너지 절감, 품질향상, 생산량 증가)의 효과를 도출할 수 있었다.
연구팀은 잘 알려진 이미지 분류 모델인 VGG-16, ResNet-18, Inception-v3 모델에서 개발 기술이 입력 기여도를 계산하는 데에 효과가 있음을 확인했다. 해당 기술은 구글(Google)이 보유하고 텐서플로우 설명가능 인공지능(TensorFlow Explainable AI) 툴 키트에 적용된 것으로 알려진 입력 기여도 측정 기술(Guided Integrated Gradient) 대비 LeRF/MoRF 점수가 각각 최대 0.436/0.020 개선됨을 보였다. 특히, 입력 기여도의 시각화를 비교했을 때, 기존 방식 대비 잡음이 적고, 주요 객체와 잘 정렬됐으며, 선명한 결과를 보였다. 연구팀은 여러 가지 모델 구조에 대해 신뢰도 높은 입력 기여도 계산 성능을 보임으로써, 개발 기술의 유효성과 확장성을 보였다.
연구팀이 개발한 딥러닝 모델의 입력 기여도 측정 기술은 이미지 외에도 다양한 예측 모델에 적용돼 모델의 예측에 대한 신뢰성을 높일 것으로 기대된다.
전기영 연구원은 "딥러닝 모델의 국소 지역에서 계산된 입력 기여도를 기반으로 상대적인 중요도가 낮은 입력을 점진적으로 제거하며, 이러한 과정에서 축적된 입력 기여도를 종합해 더욱 정확한 설명을 제공할 수 있음을 보였다ˮ라며 "딥러닝 모델에 대해 신뢰도 높은 설명을 제공하기 위해서는 입력 데이터를 적절히 변형한 상황에서도 모델 예측과 관련도가 높은 입력 특성에 주목해야 한다ˮ라고 말했다.
이번 연구는 2022년도 과학기술정보통신부의 재원으로 정보통신기획평가원의 지원을 받은 사람 중심 AI강국 실현을 위한 차세대 인공지능 핵심원천기술개발 사용자 맞춤형 플로그앤플레이 방식의 설명가능성 제공, 한국과학기술원 인공지능 대학원 프로그램, 인공지능 공정성 AIDEP 및 국방과학연구소의 지원을 받은 설명 가능 인공지능 프로젝트 및 인이지의 지원으로 수행됐다.
세계 최고 수준의 딥러닝 의사결정 설명기술 개발
우리 대학 김재철AI대학원 최재식 교수(㈜인이지 대표이사) 연구팀이 인공지능 딥러닝의 의사결정에 큰 영향을 미치는 입력 변수의 기여도를 계산하는 세계 최고 수준의 기술을 개발했다고 23일 밝혔다.
최근 딥러닝 모델은 문서 자동 번역이나 자율 주행 등 실생활에 널리 보급되고 활용되는 추세 및 발전에도 불구하고 비선형적이고 복잡한 모델의 구조와 고차원의 입력 데이터로 인해 정확한 모델 예측의 근거를 제시하기 어렵다. 이처럼 부족한 설명성은 딥러닝이 국방, 의료, 금융과 같이 의사결정에 대한 근거가 필요한 중요한 작업에 대한 적용을 어렵게 한다. 따라서 적용 분야의 확장을 위해 딥러닝의 부족한 설명성은 반드시 해결해야 할 문제다.
최교수 연구팀은 딥러닝 모델이 국소적인 입력 공간에서 보이는 입력 데이터와 예측 사이의 관계를 기반으로, 입력 데이터의 특징 중 모델 예측의 기여도가 높은 특징만을 점진적으로 추출해나가는 알고리즘과 그 과정에서의 입력과 예측 사이의 관계를 종합하는 방법을 고안해 모델의 예측 과정에 기여하는 입력 특징의 정확한 기여도를 계산했다. 해당 기술은 모델 구조에 대한 의존성이 없어 다양한 기존 학습 모델에서도 적용이 가능하며, 딥러닝 예측 모델의 판단 근거를 제공함으로써 신뢰도를 높여 딥러닝 모델의 활용성에도 크게 기여할 것으로 기대된다.
㈜인이지의 전기영 연구원, 우리 대학 김재철AI대학원의 정해동 연구원이 공동 제1 저자로 참여한 이번 연구는 오는 12월 1일, 국제 학술대회 `신경정보처리학회(Neural Information Processing Systems, NeurIPS) 2022'에서 발표될 예정이다.
모델의 예측에 대한 입력 특징의 기여도를 계산하는 문제는 해석이 불가능한 딥러닝 모델의 작동 방식을 설명하는 직관적인 방법 중 하나다. 특히, 이미지 데이터를 다루는 문제에서는 모델의 예측 과정에 많이 기여한 부분을 강조하는 방식으로 시각화해 설명을 제공한다.
딥러닝 예측 모델의 입력 기여도를 정확하게 계산하기 위해서 모델의 경사도를 이용하거나, 입력 섭동(행동을 다스림)을 이용하는 등의 연구가 활발히 진행되고 있다. 그러나 경사도를 이용한 방식의 경우 결과물에 잡음이 많아 신뢰성을 확보하기 어렵고, 입력 섭동을 이용하는 경우 모든 경우의 섭동을 시도해야 하지만 너무 많은 연산을 요구하기 때문에, 근사치를 추정한 결과만을 얻을 수 있다.
연구팀은 이러한 문제 해결을 위해 입력 데이터의 특징 중에서 모델의 예측과 연관성이 적은 특징을 점진적으로 제거해나가는 증류 알고리즘을 개발했다. 증류 알고리즘은 딥러닝 모델이 국소적으로 보이는 입력 데이터와 예측 사이의 관계에 기반해 상대적으로 예측에 기여도가 적은 특징을 선별 및 제거하며, 이러한 과정의 반복을 통해 증류된 입력 데이터에는 기여도가 높은 특징만 남게 된다. 또한, 해당 과정을 통해 얻게 되는 변형된 데이터에 대한 국소적 입력 기여도를 종합해 신뢰도 높은 최종 입력 기여도를 산출한다.
연구팀의 이러한 입력 기여도 측정 기술은 산업공정 최적화 프로젝트에 적용해 딥러닝 모델이 예측 결과를 도출하기 위해서 어떤 입력 특징에 주목하는지 찾을 수 있었다. 또한 딥러닝 모델의 구조에 상관없이 적용할 수 있는 이 기술을 바탕으로 복잡한 공정 내부의 다양한 예측변수 간 상관관계를 정확하게 분석하고 예측함으로써 공정 최적화(에너지 절감, 품질향상, 생산량 증가)의 효과를 도출할 수 있었다.
연구팀은 잘 알려진 이미지 분류 모델인 VGG-16, ResNet-18, Inception-v3 모델에서 개발 기술이 입력 기여도를 계산하는 데에 효과가 있음을 확인했다. 해당 기술은 구글(Google)이 보유하고 텐서플로우 설명가능 인공지능(TensorFlow Explainable AI) 툴 키트에 적용된 것으로 알려진 입력 기여도 측정 기술(Guided Integrated Gradient) 대비 LeRF/MoRF 점수가 각각 최대 0.436/0.020 개선됨을 보였다. 특히, 입력 기여도의 시각화를 비교했을 때, 기존 방식 대비 잡음이 적고, 주요 객체와 잘 정렬됐으며, 선명한 결과를 보였다. 연구팀은 여러 가지 모델 구조에 대해 신뢰도 높은 입력 기여도 계산 성능을 보임으로써, 개발 기술의 유효성과 확장성을 보였다.
연구팀이 개발한 딥러닝 모델의 입력 기여도 측정 기술은 이미지 외에도 다양한 예측 모델에 적용돼 모델의 예측에 대한 신뢰성을 높일 것으로 기대된다.
전기영 연구원은 "딥러닝 모델의 국소 지역에서 계산된 입력 기여도를 기반으로 상대적인 중요도가 낮은 입력을 점진적으로 제거하며, 이러한 과정에서 축적된 입력 기여도를 종합해 더욱 정확한 설명을 제공할 수 있음을 보였다ˮ라며 "딥러닝 모델에 대해 신뢰도 높은 설명을 제공하기 위해서는 입력 데이터를 적절히 변형한 상황에서도 모델 예측과 관련도가 높은 입력 특성에 주목해야 한다ˮ라고 말했다.
이번 연구는 2022년도 과학기술정보통신부의 재원으로 정보통신기획평가원의 지원을 받은 사람 중심 AI강국 실현을 위한 차세대 인공지능 핵심원천기술개발 사용자 맞춤형 플로그앤플레이 방식의 설명가능성 제공, 한국과학기술원 인공지능 대학원 프로그램, 인공지능 공정성 AIDEP 및 국방과학연구소의 지원을 받은 설명 가능 인공지능 프로젝트 및 인이지의 지원으로 수행됐다.
2022.11.23
조회수 11235
-
 이성주, 신진우 교수팀, 스스로 새로운 환경 적응하는 인공지능 기술 개발
우리 대학 전기및전자공학부 이성주 교수와 AI대학원 신진우 교수 연구팀이 공동연구를 통해 스스로 환경변화에 적응하는 테스트타임 적응 인공지능 기술을 개발했다고 밝혔다.
해당 연구는 “NOTE: Robust Continual Test-time Adaptation Against Temporal Correlation”라는 제목으로 인공지능 분야 최고권위 국제학술대회 ‘신경정보처리시스템학회(NeurIPS) 2022'에서12월 발표될 예정이다.
이성주 교수와 신진우 교수 공동 연구팀이 스스로 새로운 환경에 적응하는 “테스트타임 적응 (Test-Time Adaptation)” 인공지능 기술을 개발하였다. 연구팀이 제안한 알고리즘은 기존의 최고 성능 알고리즘보다 평균 11% 향상된 정확도를 보였다.
기계학습 모델들의 한계점은 학습했던 데이터와 다른 분포의 데이터에 적용되면 성능이 급격히 하락한다는 것이다. 이를 푸는 여러 방법 중에서 데이터를 미리 수집할 필요없이 모델이 스스로 테스트 데이터를 분석하여 변하는 환경에 적응하고 성능을 향상시키는 기술인 테스트타임 도메인 적응 (Test-Time Adaptation) 방법이 최근 산학계에서 크게 각광을 받고 있었다.
연구팀은 기존의 테스트타임 도메인 적응 기술들이 모두 데이터가 이상적인 균일분포를 따른다는 가정을 한다는 문제점에 착안했다. 실제 데이터는 환경 변화나 시간 변화에 따라 데이터 분포가 변하거나 비균일분포의 데이터에 대해서는 기존 기술을 동작하지 않는다. 하지만 연구팀이 제시한 “NOTE” 기술은 비균일분포의 데이터에서도 기존 최대 성능 알고리즘 보다 평균 11%만큼 향상된 정확도를 보였다.
이성주 교수 연구팀과 신진우 교수 연구팀의 공동연구로, 공태식 박사과정이 제1저자로 연구를 이끌었고, 정종헌 박사과정, 김태원 학사과정, 김예원 석사과정이 공동 저자로 기여하였다.
이성주 교수와 신진우 교수는 ”테스트타임 도메인 적응은 인공지능이 스스로 환경 변화에 적응하여 성능을 향상시키는 기술로, 활용도가 무궁무진하다. 이번에 발표될 NOTE 기술은 실제 데이터 분포에서 성능향상을 보인 최초의 기술이고 자율주행, 인공지능 의료, 모바일 헬스케어 등 다양한 분야에 적용이 가능할 것으로 기대된다.” 라고 밝혔다.
이 연구는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원 (No. NRF-2020R1A2C1004062)과 방위사업청과 국방과학연구소의 지원(UD190031RD)으로 한국과학기술원 미래 국방 인공지능 특화연구센터에서 수행된 연구이다.
이성주, 신진우 교수팀, 스스로 새로운 환경 적응하는 인공지능 기술 개발
우리 대학 전기및전자공학부 이성주 교수와 AI대학원 신진우 교수 연구팀이 공동연구를 통해 스스로 환경변화에 적응하는 테스트타임 적응 인공지능 기술을 개발했다고 밝혔다.
해당 연구는 “NOTE: Robust Continual Test-time Adaptation Against Temporal Correlation”라는 제목으로 인공지능 분야 최고권위 국제학술대회 ‘신경정보처리시스템학회(NeurIPS) 2022'에서12월 발표될 예정이다.
이성주 교수와 신진우 교수 공동 연구팀이 스스로 새로운 환경에 적응하는 “테스트타임 적응 (Test-Time Adaptation)” 인공지능 기술을 개발하였다. 연구팀이 제안한 알고리즘은 기존의 최고 성능 알고리즘보다 평균 11% 향상된 정확도를 보였다.
기계학습 모델들의 한계점은 학습했던 데이터와 다른 분포의 데이터에 적용되면 성능이 급격히 하락한다는 것이다. 이를 푸는 여러 방법 중에서 데이터를 미리 수집할 필요없이 모델이 스스로 테스트 데이터를 분석하여 변하는 환경에 적응하고 성능을 향상시키는 기술인 테스트타임 도메인 적응 (Test-Time Adaptation) 방법이 최근 산학계에서 크게 각광을 받고 있었다.
연구팀은 기존의 테스트타임 도메인 적응 기술들이 모두 데이터가 이상적인 균일분포를 따른다는 가정을 한다는 문제점에 착안했다. 실제 데이터는 환경 변화나 시간 변화에 따라 데이터 분포가 변하거나 비균일분포의 데이터에 대해서는 기존 기술을 동작하지 않는다. 하지만 연구팀이 제시한 “NOTE” 기술은 비균일분포의 데이터에서도 기존 최대 성능 알고리즘 보다 평균 11%만큼 향상된 정확도를 보였다.
이성주 교수 연구팀과 신진우 교수 연구팀의 공동연구로, 공태식 박사과정이 제1저자로 연구를 이끌었고, 정종헌 박사과정, 김태원 학사과정, 김예원 석사과정이 공동 저자로 기여하였다.
이성주 교수와 신진우 교수는 ”테스트타임 도메인 적응은 인공지능이 스스로 환경 변화에 적응하여 성능을 향상시키는 기술로, 활용도가 무궁무진하다. 이번에 발표될 NOTE 기술은 실제 데이터 분포에서 성능향상을 보인 최초의 기술이고 자율주행, 인공지능 의료, 모바일 헬스케어 등 다양한 분야에 적용이 가능할 것으로 기대된다.” 라고 밝혔다.
이 연구는 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원 (No. NRF-2020R1A2C1004062)과 방위사업청과 국방과학연구소의 지원(UD190031RD)으로 한국과학기술원 미래 국방 인공지능 특화연구센터에서 수행된 연구이다.
2022.10.21
조회수 10800
-
 악천후에서도 자율주행을 가능하게 하는 세계 최고의 4D 레이더 인공지능 기술 개발
우리 대학 조천식모빌리티대학원 공승현 교수 연구팀이 세계 최초로 악천후 상황에서 안정적인 자율주행을 가능하게 하는 4D 레이더(Radar)의 주변 객체 인지 인공지능 기술을 개발했다고 20일 밝혔다. 연구팀은 구축된 인공지능 학습 데이터셋(Dataset)인 KAIST-레이더(이하 K-레이더)와 개발된 인공지능 신경망(RTN4D) 그리고 전 세계 연구자를 위한 4D 레이더 인공지능 개발 플랫폼(Platform)과 관련 벤치마크(Benchmark)를 모두 공개한다고 밝혔다.
현재 전 세계적으로 개발되고 있는 자율주행 자동차는 주로 카메라와 라이다(LiDAR)에서 출력되는 이미지와 포인트 클라우드(Pointcloud) 데이터를 적절한 인공지능 신경망으로 처리해 자동차 주변의 객체들을 인식하는 방식으로 구현돼 있다. 그러나 카메라와 라이다는 각각 가시광선과 적외선을 사용하므로 눈비 또는 안개 상황에서 측정 성능이 크게 떨어지는데, 이로 인해 주변 객체들에 대한 인식이 어려워져 안전한 자율주행이 불가능하다.
더구나, 차내에 설치할 수 있는 카메라와 달리 자동차의 지붕에 설치하는 라이다는 외부 환경에 노출돼 있어서 그 표면에 눈비 또는 흙먼지가 묻는 경우 라이다를 이용한 전방 탐지가 어려워진다. 공승현 교수는 "젖은 도로에서 전방에 주행 차량이 있는 경우, 그 바퀴에서 일어나는 흙먼지가 섞인 물보라로 라이다 표면이 빠르게 더럽혀지고, 결과적으로 모든 전방 객체에 대한 라이다 측정이 불가능해진다ˮ고 설명한다. {그림 1 참조}
적외선을 사용하는 라이다와는 달리 77기가헤르츠(GHz) 대역의 자동차 레이더는 눈, 비, 안개 등의 악천후 상황에 매우 강건하며 표면에 눈비나 흙먼지가 묻은 상황에서도 안정적인 측정 결과를 보인다. 최근에는 고해상도의 4D 레이더(대상까지의 거리, 방위각, 높이, 도플러 주파수를 측정)가 개발돼 상용화되고 있으며, 그 성능도 빠르게 향상되고 있다.
이에 따라서 전 세계적으로 4D 레이더에 인공지능을 이용한 주변 인지 기술 연구가 시작되고 있지만, 4D 레이더에 필요한 인공지능 연구는 매우 더디게 진행되고 있다. 카메라나 라이다와 달리, 고성능 인공지능 개발에 필수적인 충분한 데이터셋이 구축되지 못하고 있기 때문이다. 2021년부터 4D 레이더의 포인트 클라우드 데이터셋이 일부 공개됐으나, 데이터의 양이 충분하지 않고 측정치가 매우 희소해 신뢰할 만한 객체 인식 인공지능 신경망 개발이 쉽지 않다.
연구팀이 공개하는 K-레이더는 악천후를 포함한 다양한 날씨 및 교통 상황에서 수집된 다양성 높은 데이터셋이며, 정확히 동기된 카메라와 라이다 측정 데이터와 함께 구축된 13테라바이트(TB)에 이르는 대용량으로 세계 최초의 4D 레이더 데이터셋이다. 특히, K-레이더는 포인트 클라우드 형태가 아닌 인공지능 신경망의 성능을 극대화할 수 있는 텐서(Tensor) 형태의 데이터셋으로, 이는 일반적인 레이더의 잡음 제거 방식을 사용하지 않아 잡음 수준의 미약한 미세 측정치를 온전히 담고 있는 형태의 데이터셋이다.
연구팀이 개발한 4D 레이더 인공지능 신경망(RTN4D)은 K-레이더로 수많은 학습을 진행했고, 그 결과 다양한 날씨와 도로 상황에서 70m 이내의 객체에 대해 객체 판별, 위치 추정 및 주행 방향 추정의 3가지 추정을 정확히 수행하는 경우가 최종 62.5%인 세계 최고의 성능을 가진다.
또한, 연구팀은 전 세계의 연구자들이 자체적으로 데이터를 추가 구축하고 신경망 기술을 개발하며 그 성능을 자체 평가할 수 있도록 레이더용 인공지능 신경망 개발 플랫폼과 벤치마크도 공개 제공한다.
조천식모빌리티대학원 공승현 교수는 "눈이나 비가 오는 날씨에서 4D 레이더 인공지능 신경망은 기존 라이다 인공지능 신경망 보다 훨씬 더 안정적인 주변 객체 인지 성능을 갖는데, 이는 4D 레이더가 악천후에서 자율주행을 위한 필수 센서임을 보여주는 결과이며{그림 2 참조}, 최근 미국의 웨이모(Waymo)와 이스라엘의 모빌아이(Mobileye)가 수년 내로 4D 레이더를 자율주행의 주요 인지 센서로 활용할 계획임을 공개적으로 밝힌 이유다ˮ라며 "우리 연구팀이 공개한 K-레이더와 4D 레이더 인공지능 개발 플랫폼 및 벤치마크를 통해, 향후 4D 레이더에 관한 인공지능 연구가 더욱 활발히 진행될 것으로 기대한다ˮ라고 말했다.
K-레이더, 4D 레이더 인공지능 신경망(RTN4D), 4D 레이더 인공지능 개발 플랫폼과 벤치마크는 연구실 홈페이지(http://ave.kaist.ac.kr/)와 깃허브(https://github.com/kaist-avelab/K-Radar)를 통해서 배포될 예정이다. 이번 연구는 한국연구재단(NRF) 및 정보통신기획평가원(IITP)의 지원과 ㈜스마트레이더시스템의 협력으로 수행됐으며, 연구 성과는 백동희 박사과정 학생이 2022년 12월에 열리는 세계적인 인공지능 컨퍼런스인 `뉴립스(NeurIPS) 2022' 데이터셋&벤치마크 트랙(Datasets and Benchmark Track)에서 발표할 예정이다(논문명: K-Radar: 4D Radar Object Detection Dataset and Benchmark for Autonomous Driving in Various Weather Conditions)
악천후에서도 자율주행을 가능하게 하는 세계 최고의 4D 레이더 인공지능 기술 개발
우리 대학 조천식모빌리티대학원 공승현 교수 연구팀이 세계 최초로 악천후 상황에서 안정적인 자율주행을 가능하게 하는 4D 레이더(Radar)의 주변 객체 인지 인공지능 기술을 개발했다고 20일 밝혔다. 연구팀은 구축된 인공지능 학습 데이터셋(Dataset)인 KAIST-레이더(이하 K-레이더)와 개발된 인공지능 신경망(RTN4D) 그리고 전 세계 연구자를 위한 4D 레이더 인공지능 개발 플랫폼(Platform)과 관련 벤치마크(Benchmark)를 모두 공개한다고 밝혔다.
현재 전 세계적으로 개발되고 있는 자율주행 자동차는 주로 카메라와 라이다(LiDAR)에서 출력되는 이미지와 포인트 클라우드(Pointcloud) 데이터를 적절한 인공지능 신경망으로 처리해 자동차 주변의 객체들을 인식하는 방식으로 구현돼 있다. 그러나 카메라와 라이다는 각각 가시광선과 적외선을 사용하므로 눈비 또는 안개 상황에서 측정 성능이 크게 떨어지는데, 이로 인해 주변 객체들에 대한 인식이 어려워져 안전한 자율주행이 불가능하다.
더구나, 차내에 설치할 수 있는 카메라와 달리 자동차의 지붕에 설치하는 라이다는 외부 환경에 노출돼 있어서 그 표면에 눈비 또는 흙먼지가 묻는 경우 라이다를 이용한 전방 탐지가 어려워진다. 공승현 교수는 "젖은 도로에서 전방에 주행 차량이 있는 경우, 그 바퀴에서 일어나는 흙먼지가 섞인 물보라로 라이다 표면이 빠르게 더럽혀지고, 결과적으로 모든 전방 객체에 대한 라이다 측정이 불가능해진다ˮ고 설명한다. {그림 1 참조}
적외선을 사용하는 라이다와는 달리 77기가헤르츠(GHz) 대역의 자동차 레이더는 눈, 비, 안개 등의 악천후 상황에 매우 강건하며 표면에 눈비나 흙먼지가 묻은 상황에서도 안정적인 측정 결과를 보인다. 최근에는 고해상도의 4D 레이더(대상까지의 거리, 방위각, 높이, 도플러 주파수를 측정)가 개발돼 상용화되고 있으며, 그 성능도 빠르게 향상되고 있다.
이에 따라서 전 세계적으로 4D 레이더에 인공지능을 이용한 주변 인지 기술 연구가 시작되고 있지만, 4D 레이더에 필요한 인공지능 연구는 매우 더디게 진행되고 있다. 카메라나 라이다와 달리, 고성능 인공지능 개발에 필수적인 충분한 데이터셋이 구축되지 못하고 있기 때문이다. 2021년부터 4D 레이더의 포인트 클라우드 데이터셋이 일부 공개됐으나, 데이터의 양이 충분하지 않고 측정치가 매우 희소해 신뢰할 만한 객체 인식 인공지능 신경망 개발이 쉽지 않다.
연구팀이 공개하는 K-레이더는 악천후를 포함한 다양한 날씨 및 교통 상황에서 수집된 다양성 높은 데이터셋이며, 정확히 동기된 카메라와 라이다 측정 데이터와 함께 구축된 13테라바이트(TB)에 이르는 대용량으로 세계 최초의 4D 레이더 데이터셋이다. 특히, K-레이더는 포인트 클라우드 형태가 아닌 인공지능 신경망의 성능을 극대화할 수 있는 텐서(Tensor) 형태의 데이터셋으로, 이는 일반적인 레이더의 잡음 제거 방식을 사용하지 않아 잡음 수준의 미약한 미세 측정치를 온전히 담고 있는 형태의 데이터셋이다.
연구팀이 개발한 4D 레이더 인공지능 신경망(RTN4D)은 K-레이더로 수많은 학습을 진행했고, 그 결과 다양한 날씨와 도로 상황에서 70m 이내의 객체에 대해 객체 판별, 위치 추정 및 주행 방향 추정의 3가지 추정을 정확히 수행하는 경우가 최종 62.5%인 세계 최고의 성능을 가진다.
또한, 연구팀은 전 세계의 연구자들이 자체적으로 데이터를 추가 구축하고 신경망 기술을 개발하며 그 성능을 자체 평가할 수 있도록 레이더용 인공지능 신경망 개발 플랫폼과 벤치마크도 공개 제공한다.
조천식모빌리티대학원 공승현 교수는 "눈이나 비가 오는 날씨에서 4D 레이더 인공지능 신경망은 기존 라이다 인공지능 신경망 보다 훨씬 더 안정적인 주변 객체 인지 성능을 갖는데, 이는 4D 레이더가 악천후에서 자율주행을 위한 필수 센서임을 보여주는 결과이며{그림 2 참조}, 최근 미국의 웨이모(Waymo)와 이스라엘의 모빌아이(Mobileye)가 수년 내로 4D 레이더를 자율주행의 주요 인지 센서로 활용할 계획임을 공개적으로 밝힌 이유다ˮ라며 "우리 연구팀이 공개한 K-레이더와 4D 레이더 인공지능 개발 플랫폼 및 벤치마크를 통해, 향후 4D 레이더에 관한 인공지능 연구가 더욱 활발히 진행될 것으로 기대한다ˮ라고 말했다.
K-레이더, 4D 레이더 인공지능 신경망(RTN4D), 4D 레이더 인공지능 개발 플랫폼과 벤치마크는 연구실 홈페이지(http://ave.kaist.ac.kr/)와 깃허브(https://github.com/kaist-avelab/K-Radar)를 통해서 배포될 예정이다. 이번 연구는 한국연구재단(NRF) 및 정보통신기획평가원(IITP)의 지원과 ㈜스마트레이더시스템의 협력으로 수행됐으며, 연구 성과는 백동희 박사과정 학생이 2022년 12월에 열리는 세계적인 인공지능 컨퍼런스인 `뉴립스(NeurIPS) 2022' 데이터셋&벤치마크 트랙(Datasets and Benchmark Track)에서 발표할 예정이다(논문명: K-Radar: 4D Radar Object Detection Dataset and Benchmark for Autonomous Driving in Various Weather Conditions)
2022.10.20
조회수 9060